
技术摘要:
本发明涉及车辆自主操纵方法,包括通过安装在车辆上的前置传感器检测前方区域的周围环境数据,通过车尾传感器检测后方区域的周围环境数据,通过位置传感器检测车辆的位置,将车辆位置分配给包含坡度信息的地形图中的位置,从地形图调用车辆所在地前后预定范围内的坡度 全部
背景技术:
典型情况下,传感器数据被应用于车辆的自主或自动行驶方法,以实现车辆在道 路上的导航及检测诸如其他车辆或交通参与者等目标。检测目标用的周围环境数据检测传 感器通常包括通过一水平孔径角和一垂直孔径角定义的一视野,由此能检测一特定距离范 围内的周围环境数据。基于这类方法的自主行驶在道路行驶场景和道路基本平坦的地形场 景中已取得了明显的进展。 US 2017/0356751 A1描述了一种用于一自主行驶车辆的路线规划方法,其中,从 道路网络信息中接收关于一道路区段的坡度和曲率信息。获知的信息根据对一车辆传感器 系统检测特性的认知加以分析,以确定车辆是否能在所调查区段中“越过山坡查看”。如果 判定车辆无法越过山坡查看,则将对自主行驶车辆进行导航,以避开这一道路区段。
技术实现要素:
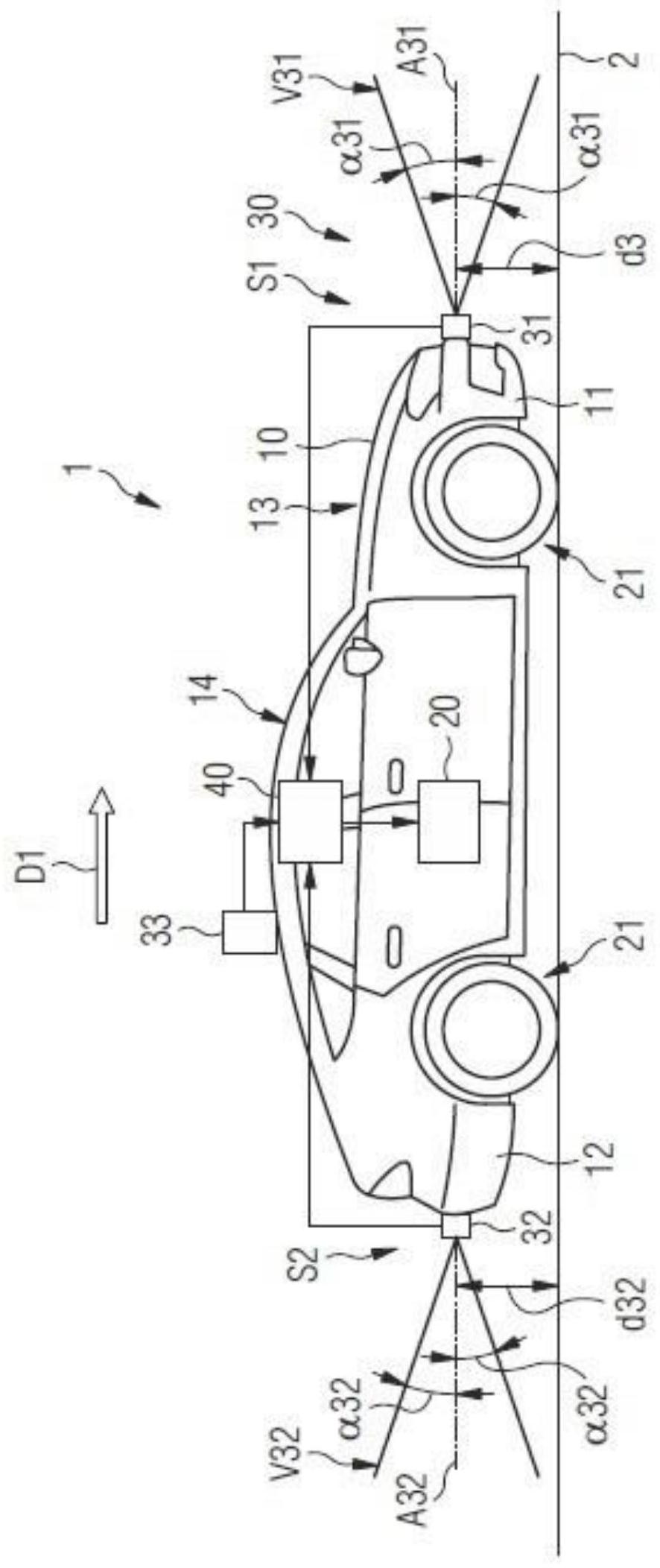
本发明的构思之一是,在斜坡或山坡行驶情形中提高自主行驶车辆的安全性。 因此,本发明推出一种根据权利要求1所述的方法以及一种根据权利要求8所述的 车辆。 根据本发明一第一观点,提供一种用于在一道路上在一个行驶方向上行驶的车辆 自主操纵的一种方法。该方法包括,通过一前置传感器检测一前方区域的周围环境数据,其 中,所述前方区域在行驶方向上位于车辆前方。前置传感器装配在车辆上一前置传感器安 装位置处,例如高于地面一预定高度的位置。此外,前置传感器以一前置传感器视轴的预定 义方位——即以一预定义空间方位——安装。 此外,所述方法还包括通过一车尾传感器检测一车尾区域的周围环境数据,其中, 所述车尾区域在行驶方向上位于车后。车尾传感器装配在车尾传感器装配位置上,例如高 于地面一预定高度的位置。此外,车尾传感器还以车尾传感器视轴的一预定义方位安装, 即,车尾传感器有一预定义的空间方位。由前置传感器和车尾传感器检测的周围环境数据 例如可包括图像数据。通常,由前置传感器和车尾传感器检测得到的周围环境数据包括与 车辆周围环境中目标有关的距离数据和/或速度数据。 车辆的一位置由一位置传感器检测,并将检测得到的车辆位置分配给一包含道路 坡度信息的地形图。例如,确定表示一车辆地理位置的坐标,并在地图中确定一相应的位 置。 在进一步的步骤中,从地形图中调用车辆所在地之前和之后一预先规定距离范围 内的坡度信息。在该步骤中,从用于车辆正在行驶道路的地图中调用诸如道路倾斜角度变 化过程等地形地貌信息或描述斜坡的类似信息。这类信息尤其针对位于车辆前的一特定第 一路段——即车辆正在接近的路段——以及针对一位于车辆后的第二路段——即车辆已 4 CN 111605537 A 说 明 书 2/6 页 经过的路段——而从地形图中调用。 接下来,确定用于检测具有一特定垂直高度的目标的前置传感器的一最大检测距 离和车尾传感器的一最大检测距离。这是基于从地图中所调用的坡度信息、从前置传感器 位置和车尾传感器位置以及从前置传感器和车尾传感器相对于前置传感器和车尾传感器 视轴的一视野的垂直孔径角实施的。因此,根据确定视野的前置传感器和车尾传感器的空 间方位以及根据传感器的垂直高度,可以几何方式确定能检测目标的最大距离,其中,会对 前方道路或后方道路的坡度加以考虑。也就是说,当一目标位于车辆前方或后方一山坡的 “顶部后方”时,由于其高度只有当该目标“越过山顶”进入传感器视野时才能被检测到。 此外,还要确定一计划行驶操纵或车辆一当前行驶状态所需的前置传感器和车尾 传感器的一最小检测距离。例如,相对于低速行驶,高速行驶时要求前置传感器和车尾传感 器能更早地检测到目标。 最后,该方法包括对车辆实施操控,尤其是对所计划的行驶操纵,使所需最小检测 距离等于或小于前置传感器和车尾传感器的最大检测距离。 根据本发明一第二观点,提供一种车辆。所述车辆包括一车身,一用于操纵车辆的 操控系统,例如一动力总成/传动系和一发动机,一传感器系统以及一控制器。传感器系统 包括一前置传感器,该前置传感器装配在车辆车身前方一前置传感器装配位置处,并具有 一预定义的视轴方位,其中,所述前置传感器配置用于,检测一车身前方区域的周围环境数 据,传感器系统还包括装配在车身后方一传感器装配位置处、并有一预定义视轴方位的一 车尾传感器,其中,所述车尾传感器配置用于,检测一车身后部区域或与车身前方区域相对 的区域的周围环境数据,传感器系统还包括一位置传感器,它配置用于检测一车辆位置,尤 其是车辆地理位置。 控制器例如通过一无线或有线连接装置与传感器系统和操控系统进行数据通信。 控制器配置用于, -将车辆位置分配给一包括一道路坡度信息的地形图中的某一位置, -从地形图调用车辆所在地前方和后方一预定范围内的坡度信息, -基于所述坡度信息、基于前置传感器和车尾传感器的位置以及根据前置传感器 和车尾传感器相对于前置传感器和车尾传感器视轴的一垂直孔径角,确定用于检测具有特 定垂直高度的目标的前置传感器和车尾传感器的一最大检测距离, -确定一计划行驶操纵或车辆一当前行驶状态所需的前置传感器和车尾传感器的 一最小检测距离,以及 -控制操控系统以操纵车辆,使所需最小检测距离等于或小于前置传感器和车尾 传感器的最大检测距离。 根据第二方面所述车辆尤其能执行根据本发明第一方面所述的方法。因此,针对 所述方法公布的特征和优点也适用于所述车辆,反之亦然。 本发明所基于的理念之一是,基于传感器的位置和方位,还基于有关车辆前后道 路坡度的信息,从几何角度确定前置传感器和一尾传感器可检测的范围,其中,所述坡度信 息是针对车辆所在地位置从一地图上调用的。该想法的一项优点是能使车辆的操纵与车辆 周围环境相适应。也就是说,如果确定,传感器的最大检测距离受起伏不平的丘陵道路走势 的影响,则可更小心谨慎地对车辆进行操纵。尤其是,通过操纵车辆使所需最小检测距离等 5 CN 111605537 A 说 明 书 3/6 页 于或小于最大实际检测距离,最大实际检测距离外的区域不再与自主行驶相关联。由此,可 显著提高在起伏不平的丘陵道路上自动行驶的安全性。本发明有益的变型和实施方式见于 从属权利要求和以下描述。 根据所述方法的一实施方式,车辆操控包括,只有在所需最小检测距离小于所确 定的最大检测距离时才执行所计划的行驶操纵。所计划的行驶操纵可包括例如为超越道路 上另一车辆而在道路上变道。如果车尾传感器例如不能超越一山丘顶峰检测后面的车辆 时,则不允许超车。由此,安全性得以进一步的提高。 根据另一实施方式,车辆操控包括减小或提高一车辆的行驶速度。例如,如果车辆 以一特定速度向一山顶方向行驶,则前置传感器根据其位置和方位可能无法检测到处于山 顶后面的目标。如果所述车辆高速行驶,那么可能会要求前置传感器有一较大的最小检测 距离。但是,如果实际速度所需的最小检测距离大于传感器的实际检测距离,则会降低车辆 速度。由此,可在山地行驶情形中更可靠地避免碰撞。 根据另一实施方式,对于具有特定垂直高度的多个目标将重复确定最大检测距 离。例如,一卡车有比一轿车或行人更高的高度。由此,前置传感器和车尾传感器可能确实 能检测到处于山顶后面的卡车,但却无法检测到一行人。因此,通过针对一要检测物体的高 度的不同输入重复进行多次来确定最大检测距离的步骤,来进一步提高检测的可靠性。此 外,在某些情况下或在某些道路上,不同目标有的会出现,有的不会出现。例如,单车道的道 路通常不允许卡车通行。由此,进一步提高了所述方法的灵活性和效率。可选地,至少一特 定最低高度被定义为一允许开车前往/越过目标的最大高度。例如,可被接受的允许开车前 往/越过的目标高度小于0.5米,或优选小于0.15米。该最小高度可根据车辆的绝对速度动 态调整匹配,其中,最小高度会随速度的增加而相应减小。 根据所述方法的另一实施方式,车辆位置的检测包括从一卫星系统接收位置信 号。位置传感器例如是一全球定位系统(GPS)或一格洛纳斯系统(GLONASS)接收器。 根据另一实施方式,前置传感器的安装位置和车尾传感器的安装位置与车辆行驶 道路的路面各有一相应距离。也就是说,假定车辆处于一笛卡尔坐标系中,其中,车辆一垂 直轴与Z轴相对应,则传感器安装位置与传感器的一“Z位置”有关。 根据另一实施方式,前置传感器和/或车尾传感器是一光学传感器或一雷达传感 器,例如是一摄像装置或一激光雷达传感器。通常,前置传感器和车尾传感器配置用于尤其 以距离数据和速度数据的形式提供交通参与者信息。 根据一车辆实施方式,控制器包括一存储地形图的数据存储器。该实施方式的优 点之一在于,用于从地图中调用坡度信息的处理时间极短,由此,可有效确定最大检测距 离。 根据另一车辆实施方式,位置传感器是一全球定位系统(GPS)、一格洛纳斯系统 (GLONASS)或一类似传感器。 附图说明 下面将参照附图所示实施方式对本发明进行更详细的解释。 附图用于更好理解本发明,并是该说明的固定组成部分。附图阐述本发明的实施 方式,并与相关说明一起用于解释本发明的原理。通过参考以下详细说明使本发明变得更 6 CN 111605537 A 说 明 书 4/6 页 好理解,本发明的其他实施方式和许多预期优点变得更为明显。附图元素彼此间不一定按 比例显示。相同的参考数字表示相应的类似部分。 图1该图以示意图的方式展示根据本发明一实施方式所述的车辆。 图2该图以示意图方式展示一朝上坡方向行驶的车辆,其中,一目标定位在上坡的 坡度上。 图3该图以示意图方式展示一朝下坡方向行驶的车辆,其中,一目标定位在下坡的 坡度上。 图4本图以示意图的方式展示一上面有多辆车辆行驶的三车道道路的俯视图,其 中,所述车辆之一是根据本发明一实施方式所述的车辆。 图5该图以示意图方式在一侧视图中展示图4所述情形。











