
技术摘要:
本发明提供一种智能轨道车合并点的调度方法和智能轨道控制系统,调度步骤为:步骤1,第一合并点控制器接收所管控轨道上的轨道车发送的申请信息;所述轨道车在第一合并点控制器所管控的轨道上;所述申请信息包括轨道车请求通过第一合并点的请求信息、轨道车所在轨道号和 全部
背景技术:
随着社会城镇化进程的快速发展,使用传统的公共交通会导致城市道路的严重拥 堵,因此,在面对城市交通拥堵问题日益突出的问题,多种公共交通方式应用而生,例如地 铁、新能源BRT、智能轨道等。智能轨道列车不依赖于钢轨行驶,不仅建设周期短,而且具有 轨道列车的零排放、无污染的特性,因此,智能轨道车将与现有的公共交通系统充分结合, 打造地下、地面和空中的立体化交通网络,为解决现代化城市交通运输难题提供全新的解 决方式。 智能轨道系统的轨道上有分岔点和合并点,若干具有分岔点和合并点的路段形成 了轨道的路网。如果有多个车辆同时通过合并点时,就会发生行驶的碰撞冲突。为了解决轨 道上车辆会出现碰撞冲突的问题,智能系统就必须具有合并点的调度功能,让进行合并的 两条轨道上的车辆依次通行,就能够有效的避免车辆发生碰撞冲突的现象。 现有一般采用固定红绿灯时间的方法实现合并点的调度,即模拟交通灯的逻辑, 对需要进行合并点的不同道岔上设置红绿灯,若灯为红色状态,则该轨道的车辆不能通行 驶入合并;若灯为显示为绿色状态,则该轨道的车辆能够通行驶入合并点。通过对不同轨道 上红绿灯的状态显示时间(通行时间)做出合理的设置,能够保证轨道合并点不会出现多车 辆同时通过且发生碰撞冲突的情况。但是每个轨道的车辆经过合并点的通行时间一般是固 定的,固定通行时间的方案会导致道路通行状态突变,若有正在通行的车辆时,就会发生碰 撞危险。也就是说,在自动形式控制中,由于每个灯位以固定倒计时的方式进行显示,那么, 停止的车辆A就容易根据显示的固定倒计时时间进行启动程序,出现“抢绿灯”的情况;因 此,在灯颜色状态发生变化的时候,一道岔上是绿灯,车辆A就会自启动开始行驶,而另一道 岔上则变为红灯,那么正在行驶的车辆B由于离目标距离突然减小,根据速度距离曲线控制 速度,会产生急刹车,或者刹不住车闯红灯,导致与正驶入道岔的车辆A发生碰撞,使道路不 能正常。 例如,当经过合并点4的轨道有两个,如图1所示,第一轨道1上行驶的车辆A与经过 分岔点5驶入第二轨道2上的车辆B约要同时经过第一合并点4,由于设置在第一合并点4处 的红绿灯此时的状态为:第一轨道1的灯显示为绿灯状态,同时第二轨道2的灯显示为红灯 状态,因此,行驶的车辆A能够通行经过合并点4,而行驶的车辆B此时不能通行,就需要减速 行驶或停止通行,由于红绿灯的显示状态时间为固定的30秒,那么在30秒后,两个道岔上的 红绿状态发生改变,此时第一轨道1上的灯显示为红灯状态,第二轨道2上的灯显示为绿灯 状态,而在第一轨道1上的车辆A正在行驶还未完全通过第一合并点4,虽然收到红灯信号也 不能立刻停下来,会与已经启动准备通过第一合并点4的车辆B发生碰撞;或者第一轨道1上 的车辆A离第一合并点4较远,会以较远的目标进行速度距离曲线控速,车速较快,当突然遇 3 CN 111572602 A 说 明 书 2/8 页 到变红的灯信号后,追踪目标变为合并点4后方10m处(相当于路口停车线),使追踪目标距 离突然变小,产生急刹车事故。 因此,采用模拟交通灯逻辑的控制方法虽然在一定程度上能够减少在合并点发生 高概率碰撞的危险,但还是会导致道路通行状态发生突变、出现碰撞危险,故亟需一种新的 调度方案来解决上述技术缺陷。
技术实现要素:
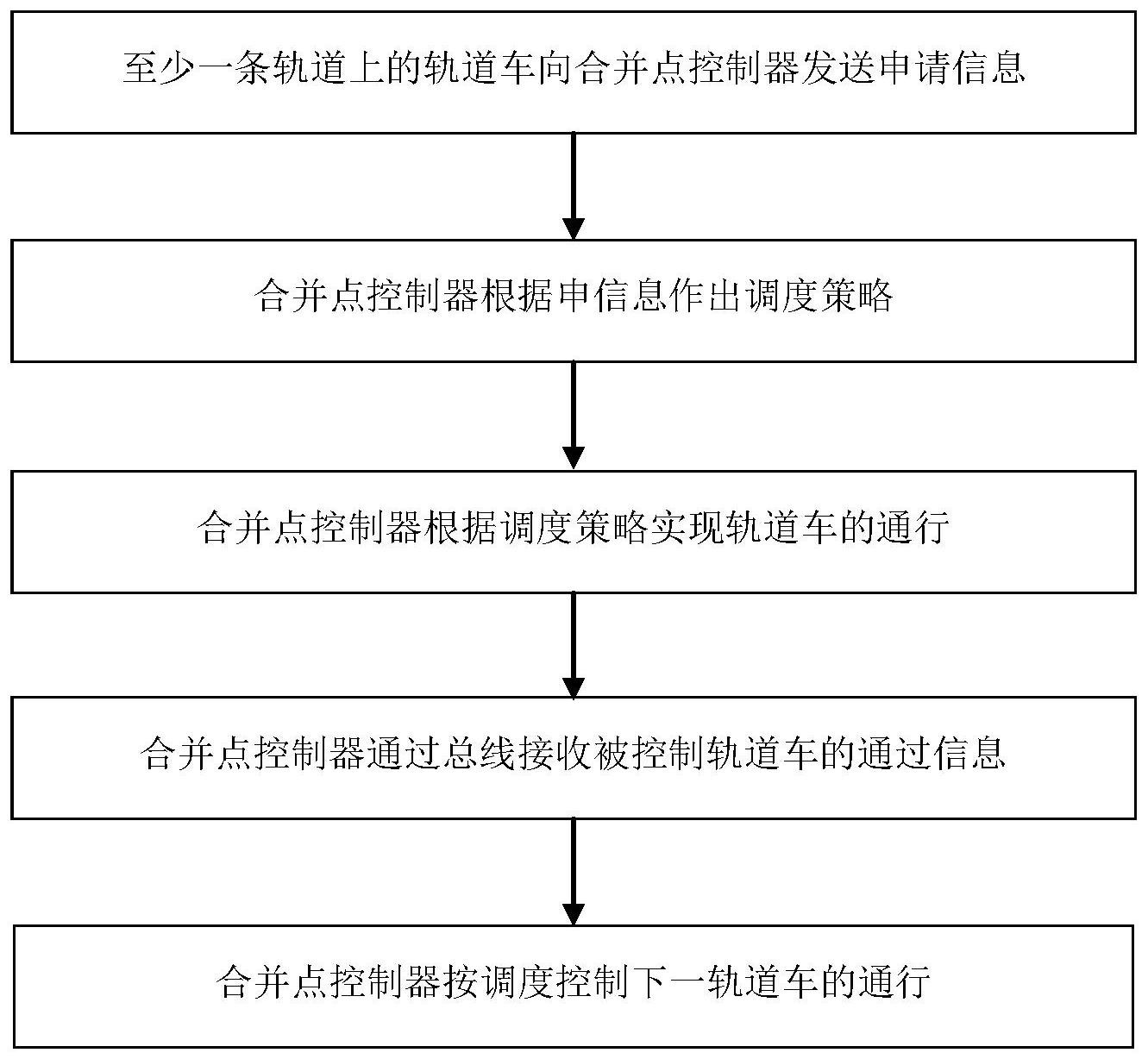
本发明的目的在于提供一种智能轨道车合并点的调度方法和智能轨道控制系统, 能够保证并提高智能轨道系统合并点的调度控制安全性。 为了实现上述目的,本发明提供如下技术方案: 一种智能轨道车合并点的调度方法,所述智能轨道车合并点的调度方法包括以下 步骤: 步骤1,第一合并点控制器接收的轨道车发送的申请信息;所述轨道车在第一合并 点控制器所管控的轨道上;所述申请信息包括轨道车请求通过第一合并点的请求信息、轨 道车所在轨道号和轨道车发送申请信息的请求时间; 步骤2,根据接收的轨道车的申请信息作出调度策略; 步骤3,按照所述调度策略控制轨道车通过第一合并点。 进一步的,所述步骤2中,根据所述申请信息判断仅有一条轨道上有轨道车要通过 第一合并点,所述调度策略将有轨道车的轨道作为被控制轨道,第一合并点控制器控制轨 道车通过第一合并点。 进一步的,所述步骤2中,根据所述申请信息判断两条轨道上均有轨道车要通过第 一合并点,所述调度策略是依据所述请求时间将两条轨道分别作为第一被控制轨道和第二 被控制轨道。 进一步的,第一合并点控制器将接收到的两条轨道上所有轨道车中请求时间最早 的轨道车所在的轨道作为所述第一被控制轨道,另一轨道作为所述第二被控制轨道。 进一步的,当判断两条轨道上均有轨道车要通过第一合并点时,所述调度策略的 判断依据还包括等待时间和第一时间阈值,当第二被控制轨道的等待时间大于第一时间阈 值时,第一合并点控制器停止调度第一被控制轨道的轨道车,待第一被控制轨道的被控制 轨道车完全通过第一合并点后,第一合并点控制器调度所述第二被控制轨道上的轨道车; 所述等待时间为一条轨道上有轨道车发出了申请信息后未收到第一合并点控制器的调度 指令,且维持这种等待调度的累计时间。 进一步的,所述调度策略的判断依据还包括第一时间阈值,当第一被控制轨道的 等待时间大于第二时间阈值时,第一合并点控制器停止调度第二被控制轨道的轨道车,待 第二被控制轨道的被控制轨道车完全通过第一合并点后,第一合并点控制器再调度所述第 一被控制轨道上的轨道车。 进一步的,所述步骤4中,通过被控制轨道车的位置信息判断所述被控制轨道车是 否完全通过第一合并点。 进一步的,当一条轨道上最前方的轨道车没有向第一合并点控制器发送请求信 息,第一合并点控制器就不会将该条轨道作为被控制轨道。 4 CN 111572602 A 说 明 书 3/8 页 本发明还提供一种智能轨道控制系统,所述智能轨道控制系统包括处理器、存储 器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器在执行所 述计算机程序时实现上述智能轨道车合并点的调度方法的步骤。 与现有技术相比,本发明所能实现的有益效果是: 本发明公开一种智能轨道车合并点调度方法,由于通过对轨道车的申请信息进行 处理,按照控制逻辑实现对交通灯的智能控制,并对轨道车通行的顺序和状态进行合理有 效的管控,使得在轨道车正常行驶情况下,轨道车在通过合并点的过程中状态不变,无碰撞 风险,同时适当的提高减少等待时间;即使出现通行状态异常的变化时,通过本申请的调度 方法也能保证通行安全。 附图说明 构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示 意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。其中: 图1为现有智能轨道系统的轨道结构示意图; 图2为本发明合并点调度控制逻辑原理图; 图3为本发明智能轨道系统合并点的调度流程图; 图4为本发明调度方法实施例一中的系统及轨道车示意图; 图5为本发明调度方法实施例二中的系统及其轨道车示意图。 附图标记说明:1、第一轨道;2、第二轨道;3、第三轨道;4、第一合并点;5、分岔点。











