
技术摘要:
本发明公开了一种含多轴转动支架的六自由度混联机器人,包括第一固定轴座、第一转动支架、第二固定轴座、第二转动支架、第一长度调节装置、第二长度调节装置、第三长度调节装置、第四长度调节装置、动平台、以及与动平台相连的定位头;第一转动支架、第二转动支架分别 全部
背景技术:
以混联机构为主机构的机器人装备具有刚度比大,精度高,可重构能力强,动、静 态性能优良等特点,在航空航天、汽车、轮船、电子、石油等行业具有广阔的应用前景,如这 些领域中的大型结构件高效加工,复杂曲面构件高精度打磨,水下石油管道搅拌摩擦焊作 业等。 专利GB2173472所公开的一类带定位头的空间混联机器人,包括三个可沿轴向伸 长或缩短的主动调节装置,此类机器人由于与连接定位头的主动长度调节装置的铰链为三 自由度铰链,且各长度调节装置分别通过一个二自由度铰链与机架连接,导致机构铰链数 目和构件数目居多,结构复杂。专利CN102699899A所公开的一种过约束高刚度多坐标混联 机器人,同样包括三个可沿轴向伸长或缩短的主动调节装置和一条从动调节装置;该机器 人减少了机构中铰链自由度数目,但为过约束机构,对零部件的制造和安装有很严格的要 求。此外,各长度调节装置分别通过一个二自由度铰链与机架连接,使得结构复杂、运动构 件数量较多,而且机架制造工艺比较复杂。专利CN1212221C公开了一种四自由度混联机器 人,由具有两自由度的并联机构和与之串联的二自由度转头组成。然而此机器人的并联部 分仅能实现平面运动,需要串接在平动或转动自由度的机构上才能实现空间运动。
技术实现要素:
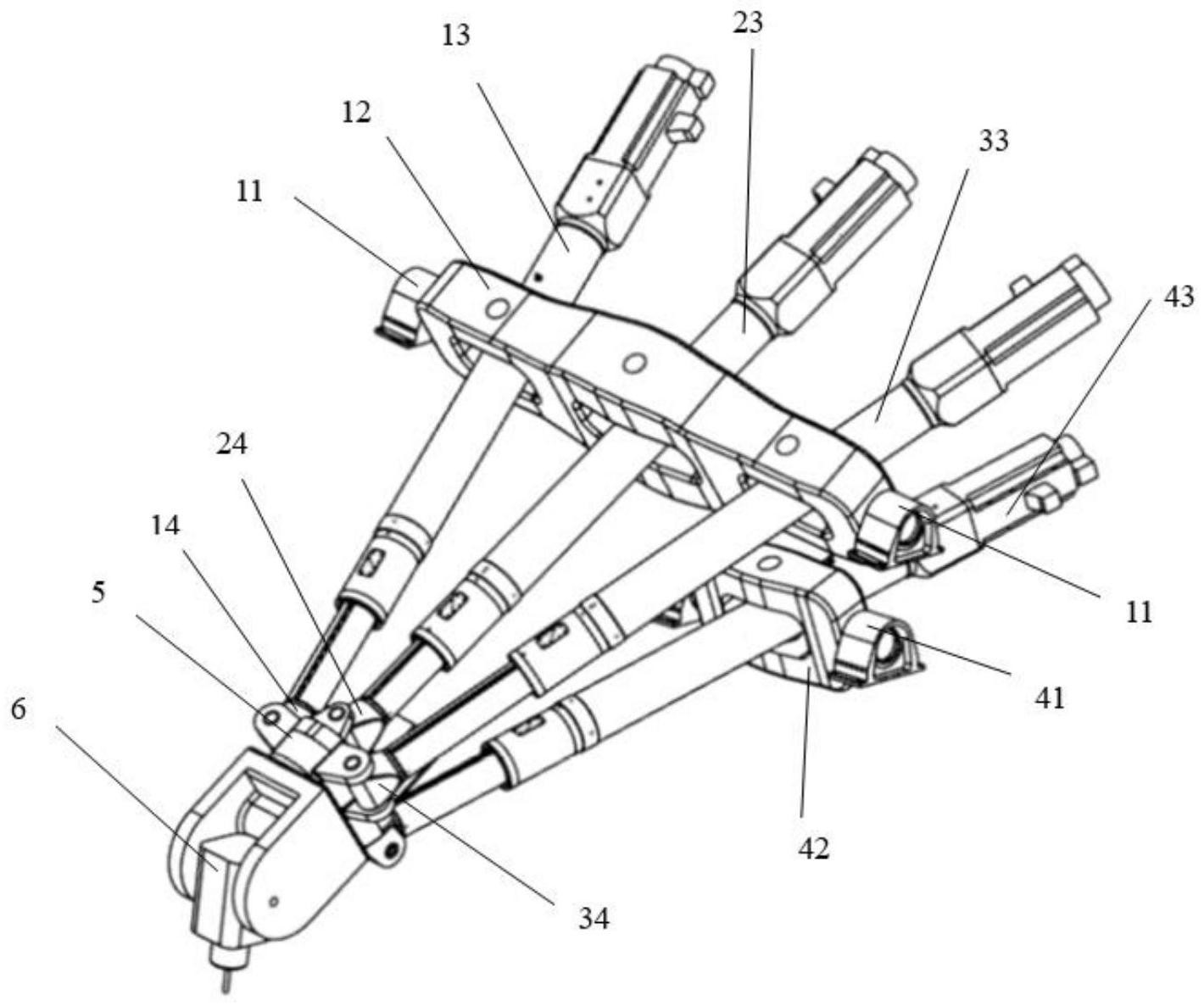
本发明的目的在于提供一种含多轴转动支架的六自由度混联机器人。 实现本发明目的的技术解决方案为: 一种含多轴转动支架的六自由度混联机器人,包括第一固定轴座、第一转动支架、 第二固定轴座第二转动支架、第一长度调节装置、第二长度调节装置、第三长度调节装置, 第四长度调节装置、动平台、定位头、驱动装置; 所述第一转动支架、第二转动支架分别与第一固定轴座、第二固定轴座转动连接; 第一长度调节装置、第二长度调节装置第三长度调节装置均贯穿第一转动支架,且均与第 一转动支架转动连接;所述第四长度调节装置贯穿第二转动支架,且与第二转动支架转动 连接;所述第一长度调节装置、第二长度调节装置、第三长度调节装置、第四长度调节装置 末端分别通过铰链与动平台连接;所述第二长度调节装置与动平台连接的铰链为一自由度 铰链;所述第四长度调节装置与动平台连接的铰链为三自由度铰链,三自由度铰链的转动 轴线不共线但相交于一点;所述定位头与动平台转动连接;所述驱动装置固连在动平台上, 输出端与定位头连接,用于驱动定位头与动平台做相对转动;所述第一长度调节装置、第二 长度调节装置、第三长度调节装置与第一转动支架的连接孔轴线相互平行,且均与第一转 动支架两端的转轴轴线垂直相交;所述第四长度调节装置与第二转动支架的连接孔轴线, 4 CN 111604885 A 说 明 书 2/5 页 与第二转动支架两端的转轴轴线垂直相交。 本发明与现有技术相比,其显著优点是: 本发明的含多轴转动支架的六自由度混联机器人自由度简单紧凑,第一、第二和 第三支链共用转动支架,使得第一、第二和第三长度调节装置两端均只需通过转动副分别 与转动支架和动平台连接即可,可大幅度减少铰链的数量,降低制造成本。 附图说明 图1为本发明实施例1中机器人的正向结构示意图。 图2为本发明实施例1中机器人的后向结构示意图。 图3为实施例1中第一转动支架结构示意图。 图4为实施例1中第二转动支架的结构示意图。 图5为本发明实施例1中动平台的结构示意图。 图6为实施例1中长度调节装置的结构示意图。 图7为图6中A-A剖视图。 图8为本发明实施例2中机器人的结构示意图。 图9为本发明实施例2中第一转动支架的结构示意图。 图10为本发明实施例2中动平台的结构示意图。 图11本发明实施例3中机器人的结构示意图。 图12为本发明实施例4的结构示意图。 图13为本发明实施例5的结构示意图。 图14为本发明实施例6的结构示意图。 图中编号所代表的含义为: 21、竖直机架,22、支撑板,23、水平机架,31、竖直机身,32、龙门床身,81、水平放置 的左右方向长轨道,82、竖直放置的左右方向长轨道,83、前后方向长轨道,5、动平台,6、定 位头,7、驱动装置,11、第一固定轴座,41、第二转动轴座 13、第一长度调节装置,23、第二长度调节装置,33、第三长度调节装置,43、第四长 度调节装置,131、伺服电机,132、外管,133、伸缩杆,134、第三销轴,135、导向键,136、键槽, 137、螺母,138、丝杠 14、第一铰链,24、第二铰链,34、第三铰链,44、第四铰链,51、第一铰链耳座对,52、 第二铰链耳座对,53、第三铰链耳座对 12、第一转动支架,121、第一中心孔,122、第二侧孔,123、第三侧孔,126/127/128、 第三销轴孔,124/125、第一销轴,axis12、第一纵轴,axis121、第一横轴,axis122、第二横 轴,axis123、第三横轴,plan121、第一中心孔中心对称面,plan122、第二侧孔中心对称面, plan123、第三侧孔中心对称面 42、第二转动支架,421、第二中心孔,422、第二销轴,axis42、第二纵轴,axis421、 第四横轴,423、第三销轴孔











