
技术摘要:
本发明提供了一种用于改善四轴机器人偏心率的辅助机构,包括导轨盘,导轨盘的上表面设有一组连接柱,导轨盘的中部设有丝杆U轴通孔,导轨盘的前侧设有上下贯通的导轨通孔,导轨通孔的横截面成扇形,导轨盘上设有滑块,滑块上设有滑块通孔,竖直的导柱贯穿于滑块通孔和导 全部
背景技术:
关节机器人(Robotjoints),也称关节手臂机器人或关节机械手臂,是当今工业领 域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业,比如自 动装配、喷漆、搬运、焊接等工作。所谓工业机器人的轴,可以用专业的名词“自由度”来解 释。 其中四轴机器人是特别为高速取放作业而设计的,可以拿起一个对象,将其提起, 水平移动,并将其设置或呈现在X,Y,Z空间沿一轴改变对象的方向(例如偏航)。也就是说, 四轴机器人的手臂部分可以在一个几何平面内自由移动。四轴机器人的前两个关节可以在 水平面上左右自由旋转的,第二个关节由一个称为羽毛(quill)的金属杆组成,金属杆末端 根据具体工业需求安装具体工装,执行工业任务。该金属杆可以在垂直平面内向上和向下 移动或围绕其垂直轴旋转,但不能倾斜。 因此,作为四轴机器人,对偏心率有着较高的要求,如图1所示为市面上某款四轴 机器人偏心率的要求。若偏心距离过大,对机器人丝杆及各零件都会有很大的磨损,会引起 机器人保护性报警。目前的四轴机器人由于这一特性,对于末端金属杆所安装的工装重量 有所限制,从而阻碍了四轴机器人的发展应用。
技术实现要素:
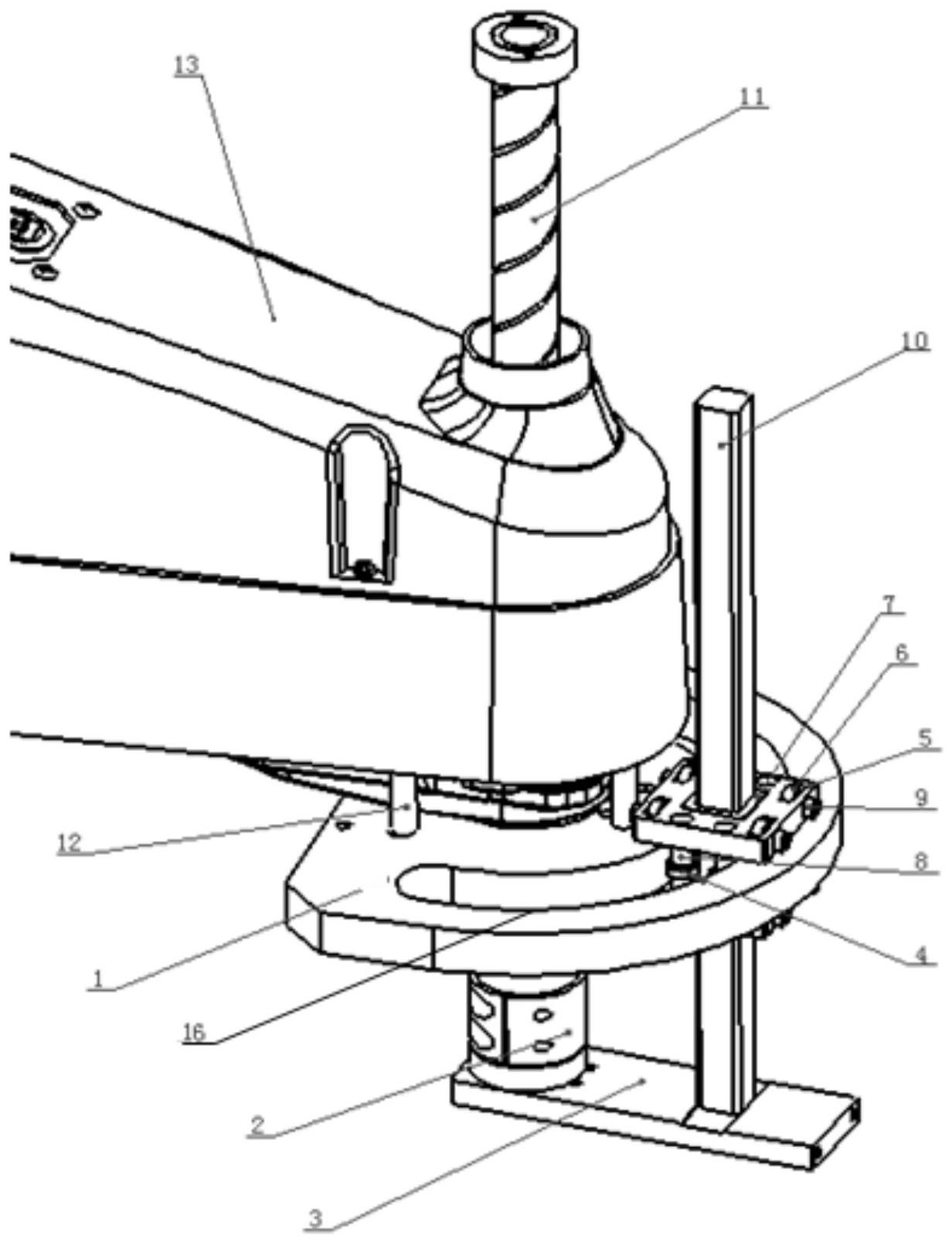
为了解决现有技术的不足,本发明提供了一种用于改善四轴机器人偏心率的辅助 机构,能够直接与四轴机器人的二轴连接,无需对现有四轴机器人进行过多改造,起到稳定 四轴机器人关节、改善偏心率的作用,使得四轴机器人末端能够与体积、重量较大的工装进 行连接,保证偏心率在正常范围,对于偏心较大的应用情况,可以起到保护机器人丝杆的作 用,也可以防止因连接板和丝杆变形引起的位置偏差,提高机器人作业精度和质量。 本发明为解决其技术问题所采用的技术方案是:提供了一种用于改善四轴机器人 偏心率的辅助机构,包括导轨盘,导轨盘的上表面设有一组用于与机器人二轴底部固定连 接的连接柱,导轨盘的中部设有用于机器人丝杆U轴通过的丝杆U轴通孔,导轨盘的前侧设 有上下贯通的导轨通孔,导轨通孔的横截面成扇形,导轨盘上设有滑块,滑块上设有上下贯 通的滑块通孔,竖直的导柱贯穿于滑块通孔和导轨通孔,导柱通过滑块沿导轨通孔移动,导 柱的底部与水平的连接板连接,连接板的后部设有用于与机器人丝杆U轴底部连接的末端 连接件。 导柱的横截面为矩形。 滑块包括分别位于导轨盘上方和下方的两个移动板,移动板的中心分别设有用于 导柱通过的滑块通孔,移动板之间通过贯穿于导轨通孔的一组竖直的连接杆连接,移动板 3 CN 111590640 A 说 明 书 2/3 页 上设有一组上下贯通的滚轮安装孔,滚轮安装孔中设有通过辊轴安装的滚轮,各辊轴与导 轨通孔所在的平面平行,并且与导轨通孔的切线垂直,位于导轨盘上方的移动板的滚轮下 表面与导轨盘的上表面接触,位于导轨盘下方的移动板的滚轮上表面与导轨盘的下表面接 触。 滑块通孔内壁嵌套有铜套,铜套的内壁与导柱的外壁形状相适应。 连接杆的中部设有始终与导轨通孔的内弧面或外弧面接触的轴承。 末端连接件为圆筒形,其筒壁设有用于与机器人丝杆U轴通过螺丝连接的螺丝孔。 连接板的前端设有用于与工装连接的安装件。 本发明基于其技术方案所具有的有益效果在于: (1)本发明提供的一种用于改善四轴机器人偏心率的辅助机构结构合理,可安装 于各种传统四轴机器人的二轴上,导轨盘上的扇形的导轨通孔和导轨通孔中的导柱相互配 合,导柱可沿导轨通孔中做圆弧路线滑动,保证了机器人丝杆U轴的正常旋转功能;同时导 柱可以在滑块的通孔内做上下滑动,保证了机器人丝杆U轴的正常升降功能,并且在运行过 程中导柱始终与机器人丝杆U轴保持平行,进而保证底部的连接板水平,使得连接板末端连 接的工装保持稳定,保证偏心率在正常范围,提高了末端载重,从而大幅扩大了四轴机器人 的应用范围; (2)本发明提供的一种用于改善四轴机器人偏心率的辅助机构中,导柱可采用矩 形方柱,避免导柱和滑块之间产生相对移动,进一步提高稳定性; (3)本发明提供的一种用于改善四轴机器人偏心率的辅助机构通过完整而独立的 结构实现,可直接加装在各类四轴机器人二轴部位,不必影响现有四轴机器人的结构或控 制软件,改装成本低,效果好; (4)本发明提供的一种用于改善四轴机器人偏心率的辅助机构的滑块设置有铜 套、滚轮等结构,可保证移动的顺滑,能够在不影响现有四轴机器人的各个方向移动性能的 条件下改善偏心率,对于偏心较大的应用情况,可以起到保护机器人丝杆的作用,也可以防 止因连接板和丝杆变形引起的位置偏差,提高机器人作业精度和质量。 附图说明 图1是现有技术中某款四轴机器人二轴偏心率要求示意图。 图2是本发明提供的一种用于改善四轴机器人偏心率的辅助机构的结构示意图。 图3是滑块的结构示意图。 图4是通过本发明提供的一种用于改善四轴机器人偏心率的辅助机构装配工装的 示意图。 图5是将本发明提供的一种用于改善四轴机器人偏心率的辅助机构装配在四轴机 器人的装配示意图。 图中:1-导轨盘,2-末端连接件,3-连接板,4-轴承,5-移动板,6-滚轮,7-铜套,8- 连接杆,9-辊轴,10-导柱,11-机器人丝杆U轴,12-连接柱,13-机器人二轴,14-四轴机器人, 15-打螺丝机构,16-导轨通孔。 4 CN 111590640 A 说 明 书 3/3 页











