
技术摘要:
一种基于随机相位噪声分离技术的光纤干涉仪臂长差测试系统及测试方法,该系统包括:扫描激光器、单频激光器、测试光路、待测光纤干涉仪、信号采集模块、信号处理系统。测试光路是由1个2*2光纤耦合器,1个光纤环形器,2个波分复用器(WDM)组成;待测光纤干涉仪为1副迈克 全部
背景技术:
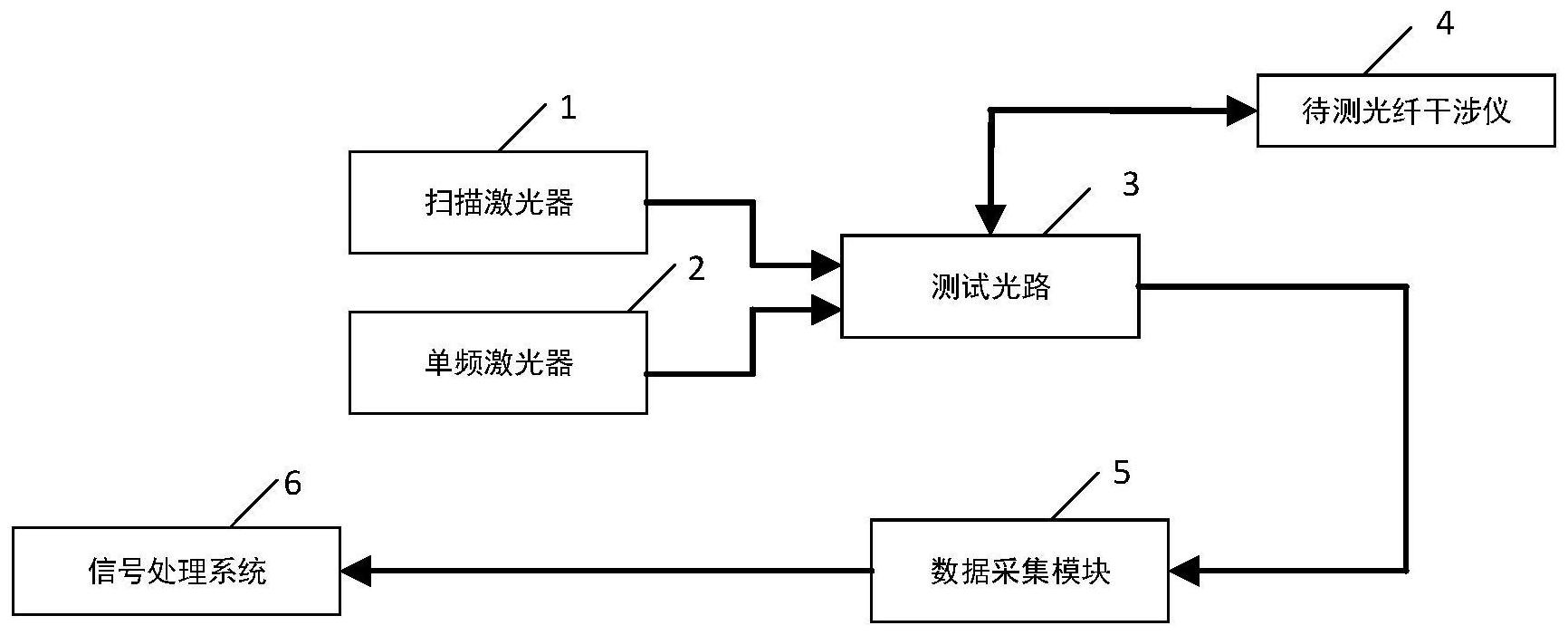
本发明目的在于克服现有技术的不足,提出一种光纤干涉仪臂长差测试系统及解 调方法,基于OFDR技术,采用双激光器探测技术及随机相位噪声分离方法,在振动或噪声环 境下实现光纤干涉仪臂长差的高精度测试。 本发明的技术解决方案如下: 一种光纤干涉仪臂长差测试系统,其特点在于,包括:扫描激光器、单频激光器、测 试光路、数据采集模块和信号处理系统;所述的测试光路包括2*2光纤耦合器、光纤环形器、 第一波分复用器和第二波分复用器; 4 CN 111551198 A 说 明 书 2/4 页 所述的扫描激光器输出的线性波长扫描光和单频激光器输出的单波长光通过所 述的2*2光纤耦合器合波后,经所述的光纤环形器的第一端口输入后,由第二端口输入待测 光纤干涉仪,经该待测光纤干涉仪反射后,其中,一路沿原路返回,经由光纤环形器的第二 端口输入后,经该光纤环形器的第三端口输出至第一波分复用器,另一路直接输入第二波 分复用器;分别经第一波分复用器和第二波分复用器输出的干涉信号经所述的数据采集模 块转化为数字信号后,经信号处理系统进行信号解调。 所述的扫描激光器是一个窄线宽波长线性扫描激光器。 所述的单频激光器是一个窄线宽单频激光器,波长不在所述扫描激光器波长扫描 工作范围内。 所述的第一波分复用器和第二波分复用器的工作波长均与所述单频激光器的波 长相同。 所述的待测光纤干涉仪是迈克逊光纤干涉仪或马赫增德光纤干涉仪。 所述的数据采集模块依次包括光电转换模块、模拟信号采集模块和信号模数转换 模块。 所述的信号处理系统包括采集模块控制和光纤干涉仪干涉信号数字处理。 一种利用上述光纤干涉仪臂长差测试系统进行光纤干涉仪臂长差的测试方法,该 方法包括如下步骤: 步骤1:经由待测光纤干涉仪输出的一路干涉信号,依次经光纤环形器和第一波分 复用器后分为第一干涉信号I1和第二干涉信号I2,所述的第一干涉信号I1是由扫描激光器 输出光经待测光纤干涉仪产生,表示为 所述的第二干涉信 号I2是由单频激光器输出光经待测光纤干涉仪产生,表示为 其中A1和 A2是干涉信号的幅值,n为光纤的折射率,L为光纤干涉仪的臂长差,c为光速, 为相位噪声, α为干涉仪两个输出端的相位差; 经由待测光纤干涉仪输出的另一路干涉信号,经第二波分复用器后分为第三干涉 信号I3和第四干涉信号I4,所述的第三干涉信号I3是由扫描激光器输出光经待测光纤干涉 仪产生,表示为 所述的第四干涉信号I4是由单频激光器输 出光经待测光纤干涉仪产生,表示为 其中B1和B2是干涉信号的幅值; 步骤2:4路干涉信号经过数据采集模块后形成数字信号输入信号处理系统; 步骤3:所述的信号处理系统对4路干涉信号进行信号处理,具体如下: ①对4路干涉信号进行归一化,得到归一化干涉信号I1′~I4′,数学表达式分别 为: ②计算差值F,公式如下: 5 CN 111551198 A 说 明 书 3/4 页 ③对F进行FFT换算,得到信号谱幅度最大值对应的频率值 即可得到光纤干涉 仪臂长差L。 与现有技术相比,本发明的有益效果是:基于OFDR技术,采用双激光器探测技术, 及随机相位噪声分离算法,消除光纤随机相位噪声对干涉信号频谱展宽的影响,提升在振 动或噪声环境下光纤干涉仪臂长差的测试精度。 附图说明 图1为本发明光纤干涉仪臂长差测试系统的总体框架图。 图2为本发明实例中的测试光路结构示意图。 图3为本发明实例中的光纤干涉仪臂长差数字信号处理流程图。 图4为本发明实例中的扫描激光器对应的携带随机相位噪声的干涉信号I1和干涉 信号I3。 图5为本发明实例中的单频激光器对应的携带随机相位噪声的干涉信号I2和干涉 信号I4。 图6为本发明实例中的携带随机相位噪声的反射拍频频谱图。 图7为本发明实例中的随机相位噪声消除后的反射拍频频谱图。
技术实现要素:
为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图和实施例对 本发明做进一步的详细说明。但以下实施例仅用于解释本发明,本发明的保护范围并不受 限于以下实施例。 本发明的一种光纤干涉仪臂长差测试系统,如图1,包括扫描激光器1、单频激光器 2、测试光路3、待测光纤干涉仪4、数据采集模块5、信号处理系统6。 所述扫描激光器如图1所示为一窄线宽波长大范围扫描激光器,相干长度大于 100m,波长扫描范围大于5nm。 所述单频激光器如图1所示为一窄线宽单频激光器,相干长度大于100m,工作波长 为1548nm。 所述测试光路如图2所示,包括1个2*2光纤耦合器7,1个光纤环路器5,2个WDM9和 10。 所述WMD的工作波长约为1548nm。 所述待测光纤干涉仪为一副迈克尔逊干涉仪,臂长差约为9m,干涉仪两个输出端 的相位差约为90°。 所述数据采集模块功能包括光电转换、模拟信号采集、12bit信号模数转换,采样 率大于20MHz。 所述信号处理系统对从所述数据采集模块输入的数字信号进行数字信号处理。 所述的信号处理系统包括采集模块控制、光纤干涉仪干涉信号数字处理、。 所述扫描激光器控制包括,激光器波长范围设置为1536~1540nm,激光器扫描速 6 CN 111551198 A 说 明 书 4/4 页 率设置为40nm/s、激光器输出功率设置为8mW。 所述数据采集模块控制包括,采样速率设置为20MHz/s、采样触发类型设置为上升 沿触发、采样数据量设置为1M。 所述的光纤干涉仪臂长差测试系统进行光纤干涉仪臂长差的测试方法,其特征在 于,该方法包括如下步骤: 步骤1:经由待测光纤干涉仪输出的一路干涉信号,依次经光纤环形器和第一波分 复用器后分为第一干涉信号I1和第二干涉信号I2,所述的第一干涉信号I1是由扫描激光器 输出光经待测光纤干涉仪产生,表示为 所述的第二干涉信 号I2是由单频激光器输出光经待测光纤干涉仪产生,表示为 其中,n= 1.4681,L≈9m,α=90°; 经由待测光纤干涉仪输出的另一路干涉信号,经第二波分复用器后分为第三干涉 信号I3和第四干涉信号I4,所述的第三干涉信号I3是由扫描激光器输出光经待测光纤干涉 仪产生,表示为 所述的第四干涉信号I4是由单频激光器输 出光经待测光纤干涉仪产生,表示为 步骤2:4路干涉信号经过数据采集模块(5)后形成数字信号输入信号处理系统; 步骤3:所述的信号处理系统对4路干涉信号进行信号处理,具体如下: ①对4路干涉信号进行归一化,得到归一化干涉信号I1′~I4′,数学表达式分别为: ②计算差值F,公式如下: ③对F进行FFT换算,得到信号谱幅度最大值对应的频率值 即可得到光纤干涉 仪臂长差L。 7 CN 111551198 A 说 明 书 附 图 1/3 页 图1 图2 图3 8 CN 111551198 A 说 明 书 附 图 2/3 页 图4 图5 图6 9 CN 111551198 A 说 明 书 附 图 3/3 页 图7 10











