
技术摘要:
本发明涉及一种用于变电站巡检机器人的远程摄影云台控制系统,所述巡检机器人包括机身以及安装于所述机身上的驱动机构和转向机构,所述远程摄影云台控制系统包括远程遥控装置、安装在所述机身上的云台装置以及安装在所述云台装置上的拍摄装置,所述云台装置上设有用于 全部
背景技术:
电力变电站中的巡检机器人在实际应用过程中面临着红外温度的检测精 度问 题,例如,在电力设备红外巡检中,机器人载荷的红外测温仪器与被测设 备表面存在一定 的距离,受到红外辐射大气衰减的影响,测温结果与实际温度 存在偏差;此外,巡检机器人 与设备热缺陷表面法线往往不处于同一水平面, 红外热像仪的观测方向与设备表面法线 存在较大的夹角,从而导致测温结果与 实际温度存在偏差。此外,现有的红外热像仪对于 FPGA DSP处理系统和 FPGA “软核”的处理系统,前者凭借DSP较强的运算和数据处理能力, 配 合FPGA流水线和并行处理机制,能够实现红外成像的主要功能,该处理系统 的缺点是 集成度低、功耗高;后者使用“软核”替代DSP,能够实现红外成像 的基本功能,具有体积小、 功耗低的优势,但是由于“软核”处理器性能的限 制,红外热像仪在视频数据的网络传输以 及图像压缩等高性能需求方面仍存在 不足。综上可知,现有红外热像仪不可兼容成像质量 高、处理速度快、系统功 耗低等优点。
技术实现要素:
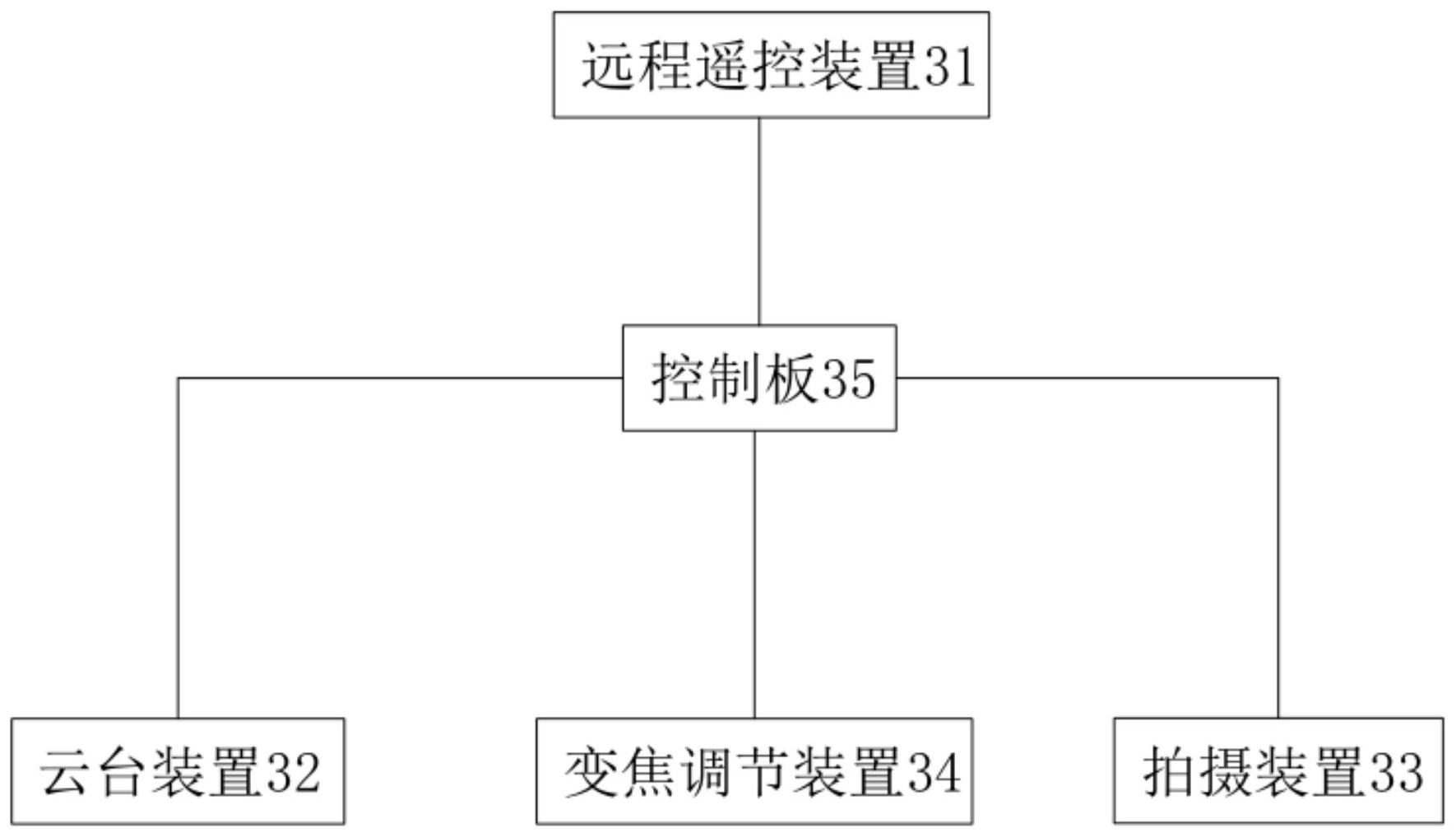
为解决上述技术问题,本发明提供一种用于变电站巡检机器人的远程摄影 云台 控制系统。 本发明采用的技术方案是:提供一种用于变电站巡检机器人的远程摄影云 台控 制系统,所述巡检机器人包括机身以及安装于所述机身上的驱动机构和转 向机构,所述远 程摄影云台控制系统包括远程遥控装置、安装在所述机身上的 云台装置以及安装在所述 云台装置上的拍摄装置,所述云台装置上设有用于调 节所述拍摄装置镜头焦距的变焦调 节装置以及分别与所述拍摄装置、云台装置、 变焦调节装置连接的控制板,所述控制板通 过无线通信单元与所述远程遥控装 置无线连接,所述拍摄装置包括用于搜索目标巡检区 域的目标搜索相机、用于 拍摄可见光图像的可见光相机以及用于拍摄红外图像的红外热 像仪,所述拍摄 装置还包括用于测量所述云台装置的垂直仰角和拍摄装置的观测视角的 第一 倾角传感器、用于测量巡检机器人车体的爬坡角度的第二倾角传感器,所述第 一倾 角传感器与所述红外热像仪上下贴合设置,所述第二倾角传感器安装在所 述机身朝向机 器人前进方向的一面上,所述云台装置包括用于安装所述拍摄装 置的方位调节架、用于控 制所述方位调节架俯仰转动的俯仰转动电机、用于控 制所述方位调节架水平转动的水平 转动电机以及分别与所述俯仰转动电机、水 平转动电机和控制板连接的伺服控制器,所述 变焦调节装置包括与所述可见光 相机和/或红外热像仪的镜头外壳相啮合的传动组件、用 于驱动所述传动组件 转动的调焦电机以及分别与所述调焦电机和控制板相连的单片机。 在本发明所述的用于变电站巡检机器人的远程摄影云台控制系统中,所述 单片 4 CN 111614875 A 说 明 书 2/5 页 机为STC-12C5A60S2单片机,所述调焦电机采用型号为TMC262的步 进电机驱动芯片。 在本发明所述的用于变电站巡检机器人的远程摄影云台控制系统中,所述 远程 遥控装置包括触摸显示器、摇杆控制器以及分别连接所述摇杆控制器和所 述控制板的无 线通信器。 在本发明所述的用于变电站巡检机器人的远程摄影云台控制系统中,所述 目标 搜索相机、可见光相机和红外热像仪的光轴相互平行且拍摄方向一致。 在本发明所述的用于变电站巡检机器人的远程摄影云台控制系统中,所述 目标 搜索相机与云端模块无线连接,所述云端模块预先存储有目标巡检区域的 整体/局部特 征,所述目标搜索相机对相机前端的大广角视野进行拍照并将拍 摄的图像上传至所述云 端模块,所述云端模块对所述目标搜索相机上传的图像 进行检测并采集图像的整体/局部 特征,且将采集到的图像的整体/局部特征与 所述云端模块中存储的目标巡检区域的整 体/局部特征进行匹配,识别出目标 巡检区域所处位置,并将位置信息发送至所述控制板, 并由所述控制板控制云 台装置转动使所述拍摄装置对准目标巡检区域拍摄,同时控制所 述变焦调节装 置调节所述拍摄装置镜头的焦距。 在本发明所述的用于变电站巡检机器人的远程摄影云台控制系统中,所述 红外 热像仪包括调理板、与所述调理板连接的处理板、与所述处理板连接的压 缩板以及分别与 所述压缩板和控制板连接的接口板,其中,所述调理板包括信 号调理模块,所述压缩板包 括Hi3516芯片模块;所述处理板包括FPGA芯片 模块,用于对所述信号调理模块传输到所述 处理板的数字视频信号执行预处理 操作;所述处理板还包括图像输出模块,用于按照预设 数字视频信号格式输出 所述FPGA芯片模块预处理后的数字视频信号,所述预设数字视频 信号为 LVDS数字视频信号、HDMI制式高清视频信号和PAL制式模拟视频信号中的 一者;所 述Hi3516芯片模块,用于对所述FPGA芯片模块预处理后的数字视 频信号进行压缩处理。 在本发明所述的用于变电站巡检机器人的远程摄影云台控制系统中,所述 Hi3516芯片模块包括:图像去噪子模块,用于对所述FPGA芯片模块预处理 后的数字视频信 号进行去噪处理;图像增强处理子模块,用于对所述FPGA芯 片模块预处理后的数字视频信 号进行图像增强和/或边缘增强处理。 本发明提供的用于变电站巡检机器人的远程摄影云台控制系统将倾角传 感器与 超声波测距传感器相结合,提高了红外热像仪至待测点处之间测量距离 的精确度,第一倾 角传感器与红外热像仪上下贴合固定,两者之间间距很小, 可以近似测得热像仪与待测点 连线相对水平面的倾角及观测视角,有效提高补 偿精度。红外热像仪包括调理板、处理板、 压缩板以及接口板,其中,调理板 包括信号调理模块,压缩板包括Hi3516芯片模块;由于 Hi3516芯片功能强大, 集成度高,将Hi3516芯片作为红外热像仪机芯的核心处理器,不但 可以提高 图像的处理速度,优化红外成像质量,还可以降低红外成像系统的功耗。 附图说明 下面将结合附图及实施例对本发明作进一步说明,附图中: 图1是本发明实施例的框线结构示意图; 图2是本发明实施例中巡检机器人的结构示意图; 图3是本发明实施例中云台装置的结构示意图; 5 CN 111614875 A 说 明 书 3/5 页 图4是本发明实施例中驱动机构的结构示意图。











