
技术摘要:
本发明公开了一种汽车HUD虚像的成像质量检测方法,具体涉及HUD虚像成像检测技术领域,包括通过安装组件固定安装在车载抬头显示器系统上的检测器;该检测器针对汽车HUD虚像的成像质量检测方法,包括以下步骤:S1、获取HUD输出虚像、S2、对比度与场曲的测定、S3、畸变的 全部
背景技术:
车载抬头显示器系统(HUD)是一种汽车辅助视觉安全驾驶系统,将驾驶员驾驶时 需要的一些重要信息例如时速,导航,蓝牙通话等,通过此系统投影到汽车挡风窗玻璃前 方,通过镜像,使驾驶员看到悬浮在发动机盖上方的虚像。这样,驾驶员的眼睛始终注视前 视野,减少因低头而产生的视觉盲区,从而大大提高驾驶安全性。 目前市面上有很多“伪HUD”,简单地在驾驶盘与挡风玻璃之间安装一块数字液晶 显示屏,但是该液晶显示屏幕无法显示复杂的图形或文本,而且液晶屏幕的亮度不能调整, 因此这种“伪HUD”的应用范围很窄,还存在投影距离太短,像差,畸变,对比度不高等缺点, 针对上述情况,测量汽车HUD虚像的距离和检测其成像质量势在必行,为此,我们提出了一 种汽车HUD虚像的成像质量检测方法。
技术实现要素:
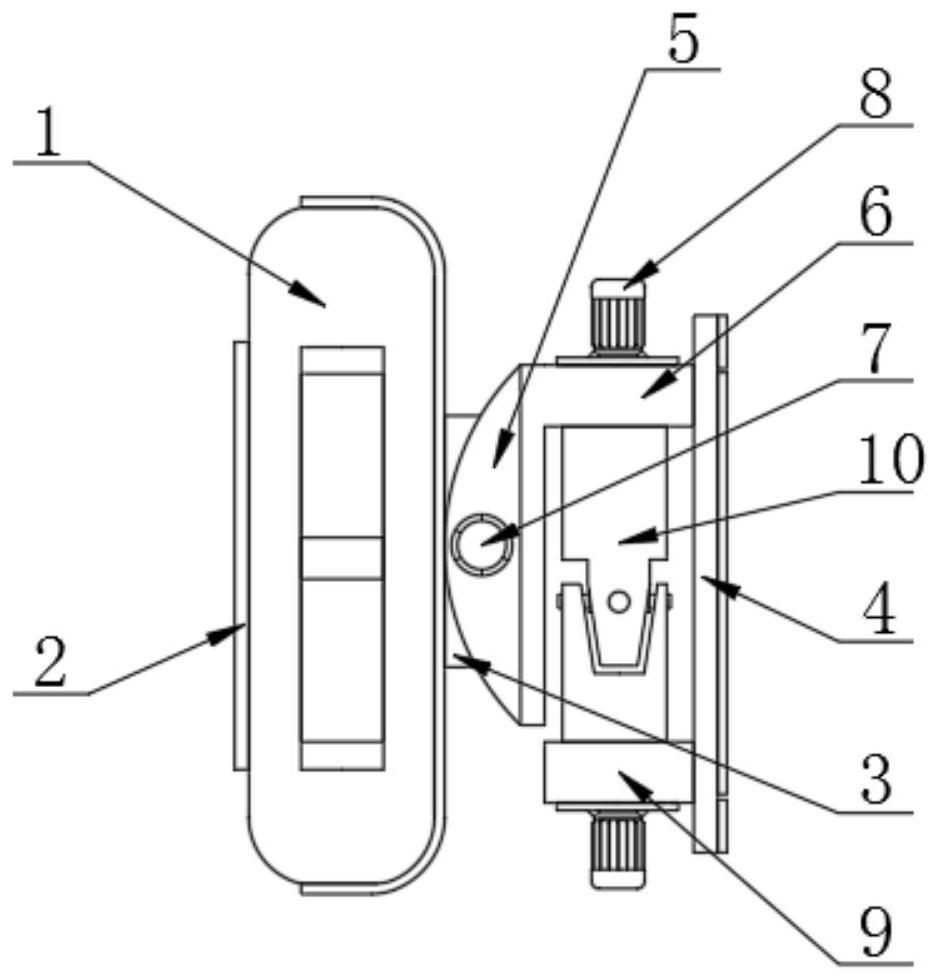
为此,本发明提供一种汽车HUD虚像的成像质量检测方法,旨在解决现有的“伪 HUD”的应用范围很窄,还存在投影距离太短,像差,畸变,对比度不高问题。 为了实现上述目的,本发明实施例提供如下技术方案: 根据本发明的第一方面,一种汽车HUD虚像的成像质量检测方法,包括通过安装组 件固定安装在车载抬头显示器系统上的检测器;该检测器针对汽车HUD虚像的成像质量检 测方法,包括以下步骤: S1、获取HUD输出虚像:调整检测器的镜头的物方焦点和汽车HUD在挡风玻璃前方 形成的虚像的虚拟焦点,使二者重合,以获取HUD输出的虚像; S2、对比度与场曲的测定:a.利用检测器的自动对焦功能,通过步进电机带动镜 头,使镜头的前焦点移动,每移动一步,镜头就拍摄一张图片,电脑对每张图片进行实时计 算分析,记录指定要分析区域的对比度;b.汽车HUD输出黑白方格图像的对比度检测图,随 机选取五个分析区域,分别用带序号1,2,3,4,5的虚线边框表示;c.利用对比度计算公式, 将五个分析区域内的对比度计算出来,整合数据,横坐标表示镜头的物方焦点的位置,单位 为mm,纵坐标表示镜头2的物方焦点每移动一处所拍摄图像对应的对比度值,得到显示五条 数值曲线的坐标图;d.通过分析各曲线的峰值是否满足规格要求,可检测出所选取的五个 区域的对比度,并得出各区域的MTF值;e.通过把区域2,3,4,5的对比度峰值对应的X坐标与 区域1的对比度峰值的X坐标相减,即可求出HUD的场曲大小。 S3、畸变的测定:汽车HUD输出分析畸变原图,通过检测器的镜头拍摄汽车HUD投射 出来的9个点的图像,通过二值化,求出9个点的X,Y坐标,代入计算公式,得到X,Y方向上的 畸变的大小; 4 CN 111586263 A 说 明 书 2/7 页 S4、亮度以及亮度的均匀度的检测:a.通过检测器的镜头拍摄到HUD投射出来的图 案,统计用户自定义的区域的灰度平均值(如上图虚线区域),分别为:I1,I2,I3,I4, I5,……;b.在各个区域的灰度值中I1,I2,I3,I4,I5,……;选出最大灰度值为Imax,最小灰 度值为Imin,Imin/Imax得到亮度均匀度的数值大小,并通过亮度均匀度判断HUD输出图像 的亮度是否均匀; S5、视场角大小FOV的检测:a.通过检测器的镜头拍摄到HUD投影出来的画面;b.通 过计算机找出图像四个角附近灰度值变化最快的四个点,获得到4个坐标点的X,Y坐标;c. 分别求出上方两个十字架中心点的物理间距h1,以及下方两个十字架中心点的物理间距 h2,并求出二者的平均值h=(h1 h2)/2,已知检测器的镜头焦距为f,那么FOVH=2*arctan (h/2f);同理,分别求出左边两个十字架中心的物理间距v1和右边两个十字架中心的物理 间距v2,并求出平均值v=(v1 v2)/2,则FOVV=2*arctan(v/2f),即可得到视场角大小FOV 的数值大小; S6、色度图的检测:利用光栅光谱仪,记录HUD在各波长范围内的能量分布,在色度 图上描出对应的色度坐标,根据CIE1931标准色度学系统,求出色度图的X、Y位置; S7、重影的检测:a.通过检测器的镜头拍摄HUD投影出来的画面;b.从上而下求出 灰度值变化最快区域的像数范围的高度h;c.已知摄像机的镜头焦距为f,则重影的大小为: arctan(h/f),即可得到重影的数值大小; S8、杂散光和鬼影的检测:a.通过检测器的镜头拍摄HUD投影出来的画面;b.在画 面上画出白色方框并计算白色方框内的黑色区域的灰度平均值,用户可以设定I1,I2上限 值来判定光学系统的带来的杂散光和鬼影带来的影响即可。 进一步地,所述安装组件包括固定设置在检测器背部的基座,所述基座的外表面 轴接有立板,且立板与基座的连接处固定设有驱动电机,所述立板的背部焊接有移动座,且 移动座的一端固定设有基板,所述基板远离移动座的一端焊接有立座,且立座与移动座之 间固定设有万向轴,所述立座与移动座的外侧壁分别固定设有与万向轴相连接的步进电 机。 进一步地,步骤S2所述的虚线边框的边长是黑白方格边长的整数倍,使得虚线边 框内黑色像素总数等于白色的像素总数。 进一步地,步骤S2所述的对比度的计算公式为V=(Imax-Imin)/(Imax Imin),其 最大值不超过1。 进一步地,步骤S3所述畸变的种类包括梯形畸变,微笑畸变,平行四边形畸变及菱 形畸变。 所述梯形畸变中X,Y方向上的梯形畸变的大小的计算方法为:X方向:(上边-下 边)/(上边 下边),即是(a-b)/(a b);Y方向:(左边-右边)/(左边 右边),即是(c-d)/(c d)。 所述微笑畸变的计算方法为:a.如果9个点中只是X轴方向有偏离,则可计算X轴方 向的畸变:水平方向上,中间点偏移的垂直距离除以左右两点的距离,同理计算上中下的偏 移值除以水平长度,再取平均值;公式为,x轴偏移量=(a/A b/B c/C)/3。 b.如果9个点中只是Y轴方向有偏离,则可计算Y轴方向的畸变:竖直方向上,中间 点到上下两点连线的水平偏移量除以上下两点的距离,再求左中右3线偏移量的平均值,公 5 CN 111586263 A 说 明 书 3/7 页 式如上。 进一步地,所述平行四边形畸变的计算方法为:tan a=d1/h,tan b=d2/H,平均 的畸变为:(tan a tan b)/2。 进一步地,所述菱形畸变的计算方法如下:2条对角线的差的绝对值除以对角线的 和。公式为:|a-b|/|a b|。 本发明具有如下优点: 1、利用检测器的镜头拍摄汽车HUD投影的虚像,并结合该检测方法分别分析图像 的对比度,场曲,畸变(畸变分为微笑畸变,梯形畸变,平行四边形畸变,菱形畸变),亮度以 及亮度的均匀度,视场角大小,色度图,重影和鬼影等像差特性,通过分析上述特征,从而分 析与评价汽车HUD虚像的成像质量,并结合分析数据,解决汽车HUD的投影距离太短,像差, 畸变,对比度不高问题,大大提高汽车HUD在汽车驾驶的应用效果以提高汽车驾驶的安全 性; 2、检测器通过安装组件固定安装在车载抬头显示器系统上,利用检测器的自动对 焦功能,通过步进电机带动镜头,使镜头的前焦点移动,然后和汽车HUD在挡风玻璃前方形 成的虚像的虚拟焦点重合,以获取HUD输出的虚像,从而可引申出后续的检测方法,在汽车 HUD虚像的成像质量检测技术属于创新性的应用。 附图说明 为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方 式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅 仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 提供的附图引伸获得其它的实施附图。 本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供 熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的 实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功 效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。 图1为本发明提供的检测器的主视图; 图2为本发明提供的对比度检测图; 图3为本发明提供的对比度值的曲线坐标图; 图4为本发明提供的分析畸变原图; 图5为本发明提供的梯形畸变图; 图6为本发明提供的微笑畸变图; 图7为本发明提供的平行四边形畸变图; 图8为本发明提供的菱形畸变图; 图9为本发明提供的亮度检测图; 图10为本发明提供的检测视场角大小图; 图11为本发明提供的色度图; 图12为本发明提供的重影图; 图13为本发明提供的杂散光与鬼影的检测图; 6 CN 111586263 A 说 明 书 4/7 页 图中:1、检测器;2、镜头;3、基座;4、基板;5、立板;6、驱动电机;7、移动座;8、步进 电机;9、立座;10、万向轴。











