
技术摘要:
本发明公开了一种水中目标识别方法,利用小波包分解阈值去噪结合分量差异优选完成了辐射噪声信号的预处理,解决了海洋背景噪声影响辐射噪声时频特征提取以及干扰分类辨识的问题,采用小波变换的方法实现了一维序列信号到二维空间的映射,避免单一时域或者频域特征表征 全部
背景技术:
水声目标辐射噪声信号的特点是声源繁多并且集中,频谱组成多样,辐射噪声强 度较大。但是,由海洋湍流以及海水静压力效应等引起的海洋环境噪声,其频谱成分覆盖整 个频带并随各类因素而不断变化,使得水声信号十分复杂。水声目标辐射噪声信号在分类 辨识方面的研究主要集中在机器学习方面,传统机器学习方法的分类效果依赖于手工设计 特征的好坏,具有很强的主观先验性;深度学习依靠模型自身的能力实现信号特征的提取 完成分类,相较于传统机器学习特征提取的可靠性更高,但分类的准确率受制于模型的结 构,并且需要规模庞大的数据进行参数更新,生成分类决策边界。因此,若能提取出水声目 标辐射噪声信号的有效特征信息,并据此构建出差异特征集;然后将分类效果优异的模型 结构与参数迁移到水声目标辐射噪声分类任务当中,这对于实现水声目标辐射噪声的目标 检测与分类辨识具有重要意义。 辐射噪声的组成、产生机理以及传递路径较为复杂,因而使其呈现出非线性以及 非平稳的特点,单一的时域或者频域特征不能综合表示信号在时间与频率尺度下的有效信 息,无法获得信号在时频域总体变化。水声目标辐射噪声信号的时频特征是关于时间与频 率的二维空间函数,在多变复杂的海洋环境干扰下,提取到的信号时频特征中含有随机噪 声会影响分类辨识的效果。目前水声目标特征的去噪方法集中在时域中进行,对于时频域 不具有有效的处理能力,无法完成水声目标时频特征的去噪。二维变分模态分解(2D-VMD) 是一种自适应非递归的二维空间域信号处理方法,可以将一个信号分解为若干离散的子信 号,进而实现有用信号与噪声的分离,完成时频特征的去噪。另外,为增强深度学习分类模 型的泛化能力,需要复杂的模型结构来进行信号特征的提取。而实际采集的水声目标辐射 噪声信号往往是小样本数据,难以完成对复杂模型的参数更新优化。基于模型的迁移学习 可以利用小规模数据集完成复杂模型的训练,并且可以保证模型的泛化能力。目前水中目 标识别大多在时域或者频域的单一变换提取特征信息,单一维度的信号特征是一种“静态” 指标,表达信息不全面,通过特征变换之后丧失了信号原有的表达能力,不易被人们直观理 解,语义信息缺乏,导致以此为训练样本设计的分类器难以有很高的精度;基于深度学习实 现水中目标识别需要大量训练数据,模型训练周期长,不满足水中目标识别高效率的要求。
技术实现要素:
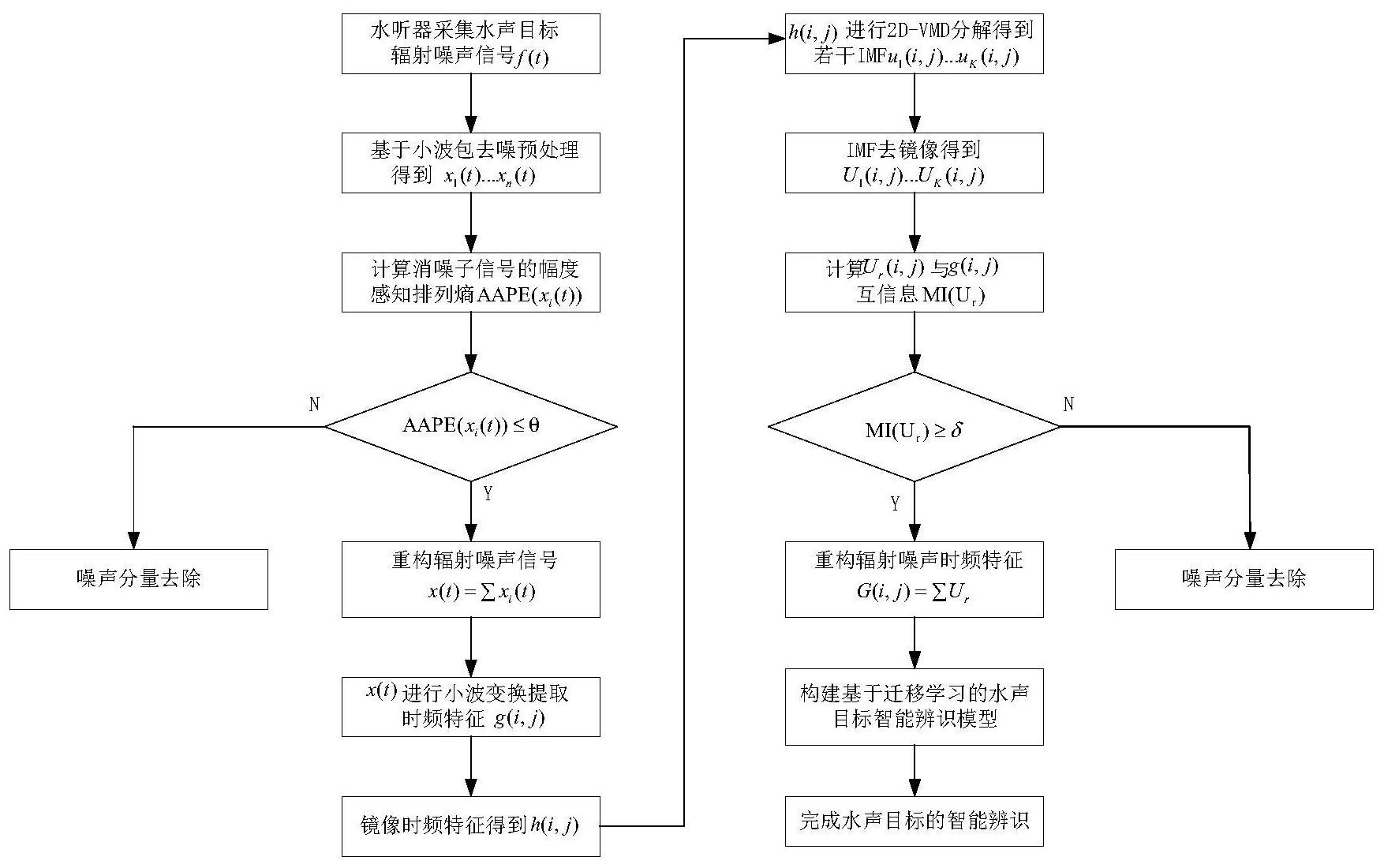
本发明的目的在于提供一种水中目标识别方法,以克服现有技术的不足。 为达到上述目的,本发明采用如下技术方案: 一种水中目标识别方法,包括以下步骤: 步骤1)、采集水声目标辐射噪声原始信号f(t),t为时间自变量; 步骤2)、利用小波包分解法将水声目标辐射噪声原始信号f(t)划分为n 个子信号 6 CN 111723701 A 说 明 书 2/10 页 并对它们进行小波阈值去噪,得到消噪后的子信号x1(t)…xn(t); 步骤3)、计算消噪后的子信号x1(t)…xn(t)的幅度感知排列熵AAPE(xi(t)) (i= 1、2…n) ,选取满足幅度感知排列熵AAPE (x i (t))≤θ的子信号重构辐射噪声信号 θ为设定阈值; 步骤4)、对重构的辐射噪声信号x(t)进行小波变换,获得消噪后的辐射噪声的时 频特征g(i,j) ,(i,j)为像素空间点坐标,对时频特征g(i,j)进行镜像延拓处理得到扩展后 的时频特征h(i,j); 步骤5)、采用二维变分模态分解方法将扩展后的时频特征h(i,j)分解为K 个固有 模态分量u1(i,j)…uK(i,j),对分解后的K个固有模态分量u1(i,j)…uK(i,j) 消除镜像延 拓,得到与扩展前时频特征大小相同的固有模态分量U1(i,j)… UK(i,j); 步骤6)、计算固有模态分量U1(i ,j)…UK(i ,j)与时频特征g(i ,j)的互信息 MI (Ur),将MI(Ur)≥δ的有效分量时频特征g(i,j)重构时频特征G(i,j),并根据时频特征G(i, j)构建小样本数据集I; 步骤7)、采用深度神经网络模型通过学习率衰减方法,在I小样本数据集上进行梯 度下降训练对深度神经网络的分类判别器的参数进行更新,直至训练收敛,利用训练好的 深度神经网络进行水中目标识别。 进一步的,所述的子信号xi(t)(i=1…n)的幅度感知排列熵AAPE(xi(t))的具体计 算过程如下: 设子信号xi(t)为长度为N的时间序列,xi(t)={y1、y2、....yN} ,计算嵌入向量 式中,m=1,2,...,N-(d-1)l,d和l分别表示嵌入维度和时延,ym为 xi(t)={y1、 y2、....yN}中下标为m的元素; 对嵌入向量 内部按照递增排序: 得到一个排列 πe=(j1,j2...jd) (2) 式中,e=1,2,...d!πe表示这d!种可能的一个排列; 计算πe的统计概率p(πe): 式中,f(πe)为πe在N-(d-1)l个排列中出现的次数; 计算相对归一化概率: 式中,A是与均值和连续样本之间差相关的调整系数,A的范围是[0,1]; 7 CN 111723701 A 说 明 书 3/10 页 得到幅度感知排列熵: 进一步的,骤4)中对子信号重构辐射噪声信号x(t)进行小波变换的具体步骤如 下: 对子信号重构辐射噪声信号x(t)∈L2(R)进行连续小波变换: 其中,W(a,b)表示小波变换后的系数, 表示选择的母小波; 为经过平移和伸缩之后的小波函数族,a是伸缩系数,b是平移系数,a,b∈R。 进一步的,对时频特征g(i,j)进行镜像延拓处理得到扩展后的时频特征 h(i,j) 具体步骤: 设时频特征g(i,j)为空间范围为a×b 对g(i,j)按列方向以第1行和第a行为镜像轴进行 对称延拓得到h'(i ,j), h ' (i,j)空间范围为 [x]为取整函数,其值等于不超过实数x的最大整数; 然后对时频特征h'(i,j)按行方向以第1列和第b列为镜像轴进行 对称延拓h(i, j),延拓后的h(i,j)空间范围为 8 CN 111723701 A 说 明 书 4/10 页 进一步的,采用二维变分模态分解将h(i,j)分解为K个固有模态分量(IMF) u1(i, j)…uK(i,j)的过程如下: (5-1)分别初始化模态参数 中心频率 和拉格朗日乘数 然后对模态参数迭代计算更新: 式中,k∈{1,...K},α是带宽约束因子, (5-2)对中心频率计算更新: (5-3)对拉格朗日乘数计算更新: 其中,τ是约束重构信号与原信号相等的约束项; 迭代停止判断条件: 对 进行傅里叶反变换得到uk(i,j)。 进一步的,步骤6)中计算固有模态分量Ur(i,j)(r=1…K)与时频特征g(i,j) 的 互信息MI(Ur)具体计算过程如下: 计算固有模态分量Ur(i,j)=A和时频特征g(i,j)=B各自的信息熵: 其中,PA(a)表示固有模态分量A的概率分布,PB(b)表示时频特征B的概率分布; (6-2)计算固有模态分量A和时频特征B的联合熵: 其中,PAB(a,b)表示固有模态分量A和时频特征B的联合概率分布; (6-3)计算固有模态分量A和时频特征B的互信息: I(A,B)=H(A) H(B)-H(A,B) (17) MI(Ur)=I(A,B)。 进一步的,采用深度神经网络Inception-v3模型作为迁移学习的框架,取深度神 经网络的瓶颈层及瓶颈层前面的网络结构作为特征提取器,保留权重参数,在特征提取器 之后搭建分类判别器。 9 CN 111723701 A 说 明 书 5/10 页 进一步的,步骤7)中在特征提取器之后搭建分类判别器具体过程如下: 对于n分类任务,在瓶颈层后面接一层n节点的全连接层将特征映射至样本空间。 最后通过softmax函数对样本进行分类,其中全连接层的输出值为: 其中,j=1,...,n,M为瓶颈层输出特征的长度;*表示全连接层; 表示全连接层 的第j个神经元与瓶颈层的第i个神经元的权重, 表示全连接层输出第j个特征所加的偏 置。 其中采用学习率衰减方法,随着训练次数的增加学习率逐渐减小,具体计算如下 所示: 其中,α表示当前训练轮次的学习率,α0表示基础学习率,αmin表示学习率衰减极 限,steps是训练的次数,i是当前训练的次数。 与现有技术相比,本发明具有以下有益的技术效果: 本发明提出了一种水中目标识别方法,利用小波包分解阈值去噪结合分量差异优 选完成了辐射噪声信号的预处理,解决了海洋背景噪声影响辐射噪声时频特征提取以及干 扰分类辨识的问题,然后采用小波变换的方法实现了一维序列信号到二维空间的映射,完 成了辐射噪声信号时频特征的提取,解决了单一时域或者频域特征表征信号不全面的问 题;对得到的时频特征进行二维变分模态分解,一方面实现了有效时频分量与噪声分量的 分离,解决了二维空间噪声信号的干扰问题,完成时频特征的去噪,另一方面,利用互信息 评判二维变分模态分解获得有效分量时频特征,对得到的固有模态分量进行特征优选并据 此重构信号,实现时频特征的特征加强,对于二维变分模态分解产生的边缘效应问题,采用 边缘镜像的方法拓展时频特征空间的范围进行二维变分模态分解,然后通过去镜像的方法 恢复原时频特征空间范围,解决了边缘效应引起的信号振荡问题,采用深度神经网络模型 通过学习率衰减方法,在I小样本数据集上进行梯度下降训练对深度神经网络的分类判别 器的参数进行更新,使得特征提取模型具有优良的泛化能力。相比于现有的水声目标差异 特征提取与分类辨识方法,本发明在克服海洋背景噪声强干扰下非线性、非平稳辐射噪声 信号特征提取困难问题上更具优势,提取时频域的全局信息,在二维空间实现信号的去噪, 解决了现有采用单一时域或频域特征表征信号不全面的问题,本方法在表征水声目标特性 方面更有优势,进而可以实现对水声目标更为准确且高效的分类辨识,因此本方法在水声 目标辐射噪声差异特征提取与智能分类辨识方面具有良好的应用前景。 进一步的,通过迁移学习的方法微调Inception-V3网络,选择瓶颈层作为输出,固 定网络第一层到瓶颈层的结构,在瓶颈层后面添加全连接层实现特征向量到类别空间的映 射,采用softmax函数进行分类,极大地减少了训练参数,解决了复杂深度学习模型对于大 规模数据限制性要求的问题。 10 CN 111723701 A 说 明 书 6/10 页 附图说明 图1为本发明实施例中流程图。 图2为本发明实施例中水声目标辐射噪声信号采用小波包分解去噪前 (a)、后(b) 时域波形与频谱的对比。 图3为本发明实施例中水声目标经过小波变换得到的时频特征。 图4(a)为水声目标时频特征经过2D-VMD特征优选的仿真结果;图4(b) 为本发明 实施例中五类舰船辐射噪声时频特征经过2D-VMD特征优选的仿真结果对比图。 图5为本发明实施例中水声目标时频特征经过2D-VMD处理后的结果图。 图6为本发明实施例中五类舰船辐射噪声信号采用Inception-V3模型进行迁移学 习模型收敛的情况。











