
技术摘要:
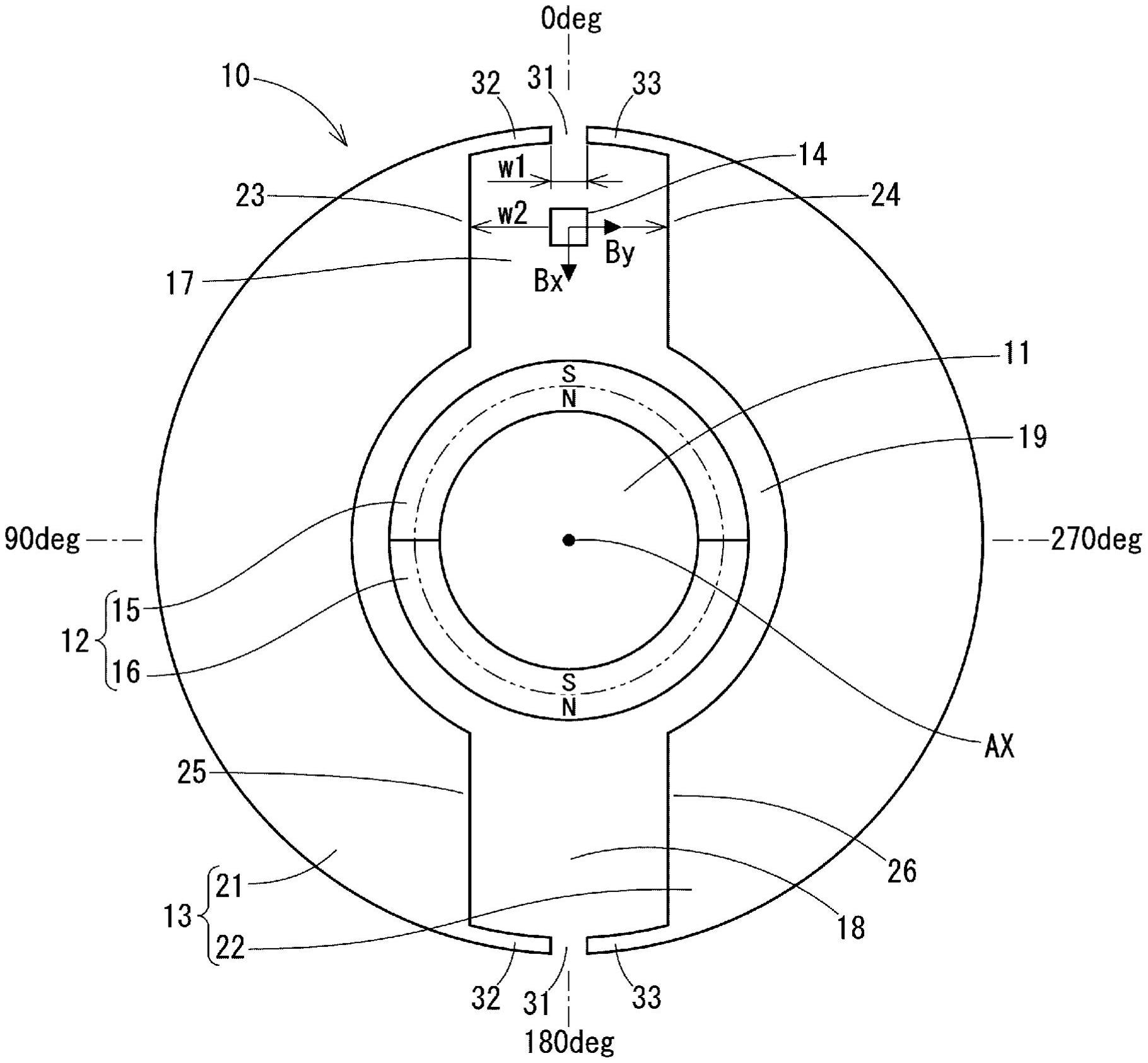
一种检测旋转体(11)的旋转角度的旋转角度检测装置(10),具备:磁铁(12),具有在与旋转体(11)的旋转轴心(AX)垂直的径向上配置的极,与旋转体(11)一起旋转;磁性部(13),在相对于磁铁(12)的径向外侧配置为环状,在周向的多个部位设有缝隙(17、18);及磁检测部(14),被配 全部
背景技术:
以往,已知有如下的旋转角度检测装置:相对于与旋转体一起旋转的磁铁在径向 外侧设置磁检测部、检测该磁场的切线方向磁通成分和径向磁通成分、基于这些检测值检 测旋转体的旋转角度。在专利文献1中,设有检测切线方向磁通成分的检测元件和检测径向 磁通成分的检测元件。 现有技术文献 专利文献 专利文献1:日本特表2009-516186号公报
技术实现要素:
在上述那样的形式的旋转角度检测装置中,由于磁检测部被配置在开放的磁场 中,所以有容易受到干扰磁场的影响的问题。对此,在专利文献1中记载了在磁检测部的周 围设置壁。但是,通过这样的壁也不能充分地降低干扰磁场的影响,检测精度会下降。 本公开是鉴于上述的问题而做出的,其目的是提供一种检测精度提高的旋转角度 检测装置。 本公开的旋转角度检测装置具备磁铁、磁性部及磁检测部。磁铁具有在与旋转体 的旋转轴心垂直的径向上配置的极,磁铁与旋转体一起旋转。磁性部在相对于磁铁的径向 外侧配置为环状,在周向的多个部位设有缝隙。磁检测部被配置在多个缝隙中的1个特定缝 隙,检测磁场的切线方向磁通成分及径向磁通成分。 设磁检测部被配置的位置为检测位置,设检测位置处的特定缝隙的切线方向宽度 为检测位置缝隙宽度。相对于检测位置位于径向外侧的特定缝隙的一部分的切线方向宽度 比检测位置缝隙窄。 因此,基于作为磁检测部的检测值的Sin波形信号及Cos波形信号进行反正切运 算,从而能够计算旋转体的360°的旋转角度。此外,通过在环状的磁性部的特定缝隙配置磁 检测部,并且相对于磁检测部的径向外侧的缝隙宽度比较窄,由此能够充分降低干扰磁场 对磁检测部检测的径向磁通成分的影响。因此,提高检测精度。 附图说明 关于本公开的上述目的及其他目的、特征及优点,一边参照附图一边通过下述的 6 CN 111602030 A 说 明 书 2/9 页 详细记述会变得更明确。 图1是概略地表示第1实施方式的旋转角度检测装置的示意图。 图2是说明第1实施方式的磁检测部的框图。 图3是表示在第1实施方式中旋转体的旋转角度与第1霍尔元件的检测信号的关系 的图。 图4是表示在第1实施方式中旋转体的旋转角度与第2霍尔元件的检测信号的关系 的图。 图5是表示在第1实施方式中旋转角度检测装置和配置在其外侧的干扰磁铁的图。 图6是按照干扰磁铁的有无而表示旋转体的旋转角度与径向磁通成分的关系、以 及旋转体的旋转角度与相对于理想波形的误差的关系的图。 图7是概略地表示第2实施方式的旋转角度检测装置的示意图。 图8是概略地表示第3实施方式的旋转角度检测装置的示意图。 图9是概略地表示第4实施方式的旋转角度检测装置的示意图。 图10是概略地表示第5实施方式的旋转角度检测装置的示意图。 图11是说明第6实施方式的旋转角度检测装置的磁检测部的框图。 图12是概略地表示第7实施方式的旋转角度检测装置的示意图。 图13是说明第7实施方式的磁检测部的框图。 图14是第7实施方式的磁检测部的示意图。 图15是表示在第7实施方式中初始的第3霍尔元件的检测值、参照值及它们的差的 图。 图16是表示在第7实施方式中经年(经过一段时间)的第3霍尔元件的检测值、参照 值及它们的差的图。 图17是说明第8实施方式的旋转角度检测装置的框图。 图18是说明第9实施方式的旋转角度检测装置的框图。 图19是说明第10实施方式的旋转角度检测装置的框图。 图20是第11实施方式的磁检测部的示意图。 图21是概略地表示第12实施方式的旋转角度检测装置的示意图。 图22是说明第12实施方式的旋转角度检测装置的框图。 图23是概略地表示第1其他实施方式的旋转角度检测装置的示意图。 图24是概略地表示第2其他实施方式的旋转角度检测装置的示意图。











