
技术摘要:
本发明公开一种基于图像处理的无人艇检测海浪的方法,其利用艇载摄像头拍摄无人艇周围海域图像,并利用高斯滤波对原图进行预处理;将预处理后的图像所属颜色空间进行转换;对图像进行形态学操作,获取海浪所属的区域;统计海浪所属像素区域的面积在整张图像中的占比; 全部
背景技术:
海底测绘是无人艇作业的重要任务之一,然而海上情况多变,尤其是恶劣气候所 导致的狂风大浪和海啸等自然灾害,对无人艇船体和所搭载的设备构成了极大的威胁,容 易损坏艇载设备,甚至导致无人艇翻船,带来重大损失。同时,无人艇测绘的海域多为有人 测绘船不方便测绘的深度较浅的海域,这些地方有的岛礁伸出海面,在极端天气情况下,风 浪摇晃,极易使得无人艇碰撞岛礁或者触及暗礁,破环舰体结构,严重情况下甚至使得无人 艇报废。 目前,业界常用的现有技术是这样的: (1)利用天气预报进行对预测绘海域的天气等海况信息进行预估和判断,然而,海 上天气多变,无人艇往往位于无人海域单独作业,单一的天气预报很难预测及时并且准确 的无人艇周围海况; (2)利用毫米波雷达对周围的海况进行建模,获取无人艇周围海浪信息,然而,雷 达的价格高昂,性价比低,同时雷达进行海浪建模需要耗费一定的计算资源,而无人艇测绘 本身使用的传感器设备众多,再使用雷达进行单一的海浪建模会造成计算资源更为紧张。 并且雷达建模的采样建模耗费时间,难以做到实时建模,浪费大量资源而获取的效果不佳。 因此,需要一套低成本、高效率的海浪检测系统来对周围海浪大小进行检测以规 避风浪危害。
技术实现要素:
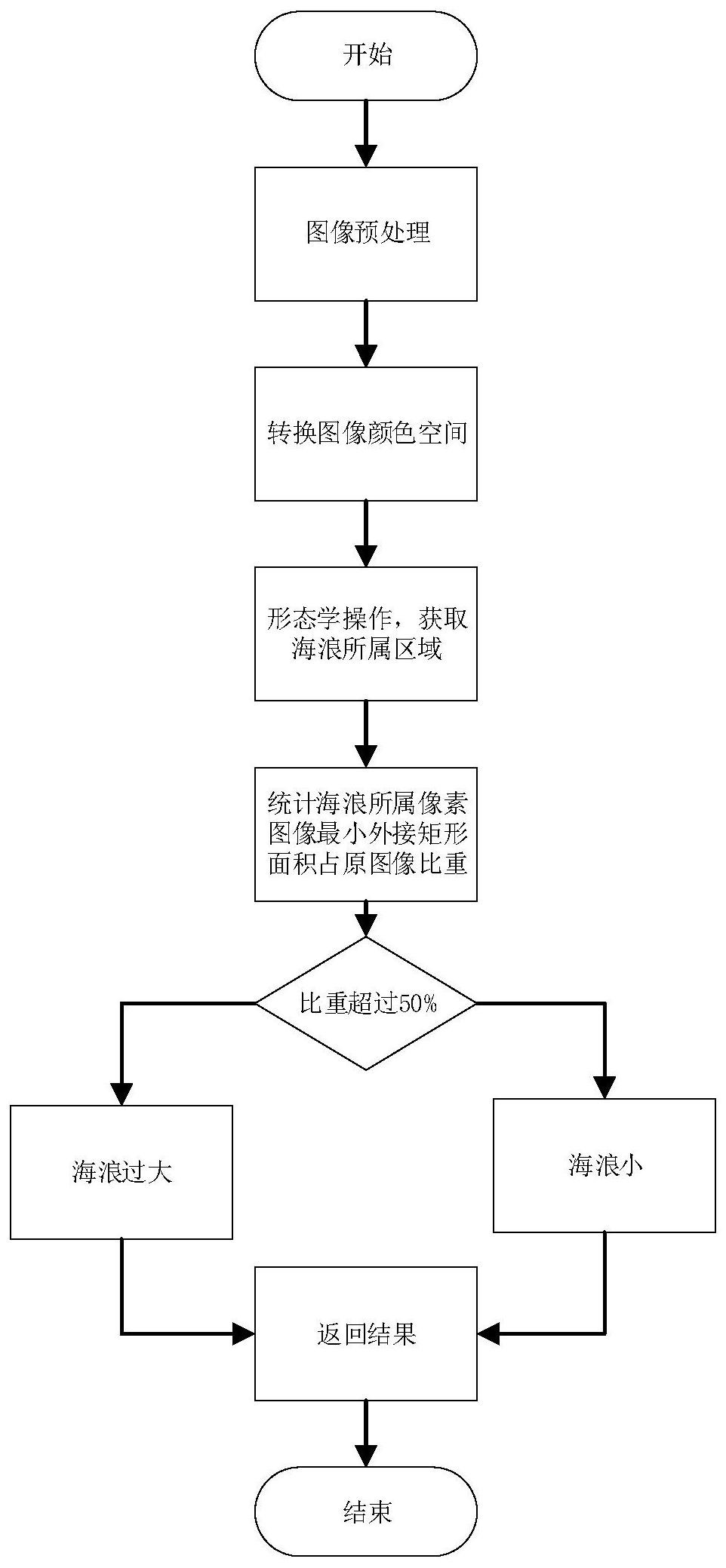
针对现有技术存在的问题,本发明提供了一种基于图像处理的无人艇检测海浪的 方法,其是利用艇载摄像头视频中检测海浪高度并进行预警的方法。 本发明通过以下技术方案予以实现: 一种基于图像处理的无人艇检测海浪的方法,具体包括以下步骤: 步骤一:海浪视频预处理,减少视频中图像的噪声,得到下一步可以处理的图像; 步骤二:将预处理后的图像所属颜色空间进行转换; 步骤三:对图像进行形态学操作,获取海浪所属的区域; 步骤四:统计海浪所属像素区域的面积在整张图像中的占比; 步骤五:当海浪所属像素面积在整张图像中的占比超过设定值后,生成触发信号, 表明海浪大小,进行预警。 进一步,所述步骤一中海浪视频预处理方法,具体包括: (1)对获取的图像逐帧进行高斯滤波; (2)获取图像的基本参数,包括图像尺寸的总行数H和图像总列数W。 4 CN 111583325 A 说 明 书 2/5 页 进一步,所述高斯滤波是一种线性滤波器,其抑制噪声,平滑图像,减少因为环境 因素所导致摄像头采集的图像中的白噪声,保留图像中更多的有效特征,得到预处理图像, 高斯卷积核尺寸为5×5。 进一步,所述步骤二中预处理后的图像所属颜色空间转换,具体包括: (1)RGB颜色空间根据颜色发光原理来设计,使用红(R)、绿(G)、蓝(B)三种颜色不 同比例混合,描述物体颜色,而HSV颜色空间是一种比较直观的颜色模型,使用色调(H)、饱 和度(S)和明度(V)来描述物体颜色,转换公式如下: 令 取R′,G′,B′中最大值,记为Cmax=max(R′,G′,B′); 取R′,G′,B′中最小值,记为Cmin=min(R′,G′,B′), 令Δ=Cmax-Cmin,则 V=Cmax; (2)根据转换公式,对原始图像进行像素点的逐一运算,计算出色调H,饱和度S和 明度V,生成得到HSV图像。 进一步,所述步骤三中对图像进行形态学操作,获取海浪所属的区域,具体包括: (1)由于海浪腾起时呈现出的颜色偏白,与周围平静的海水的蓝色有所区别,利用 颜色对比进行海浪区分,根据HSV颜色空间特性,设置上下阈值,其中设置色调(H)上阈值为 180,下阈值为0,饱和度(S)上阈值为200,下阈值为0,明度(V)上阈值为255,下阈值为220, 记录图像色调、饱和度和明度位于阈值区间的像素坐标; (2)对预处理图像进行二值化操作,上一步中记录像素的坐标对应预处理图像中 的像素使其红(R)、绿(G)和蓝(B)三个通道值设为255,即显示为白色,剩余像素红(R)、绿 (G)和蓝(B)三个通道值设为1,即显示为黑色; (3)对图像中的小水花做过滤处理,具体为对上一步图像先进行图像腐蚀操作,采 用的腐蚀算子尺寸为5×5,随后进行图像膨胀操作,采用的膨胀算子尺寸为5×5。 进一步,所述步骤四中统计海浪所属像素区域的面积在整张图像中的占比,具体 包括: (1)计算白色像素点,即像素点的红(R)、绿(G)和蓝(B)三个通道值为255的像素, 记录最左边(xL,yL),最右边(xR,yR),最上边(xH,yH),最下边(xD,yD)出现的白色像素坐标,依 5 CN 111583325 A 说 明 书 3/5 页 据着四个坐标计算出海浪图像的最小外接矩形面积,则最小外接矩形像素数量为 N=(yH-yD)×(xR-xL); (2)用最小外接矩形像素数量N除以图像所有像素数量,计算白色像素占图像总像 素比例,记为η,即 进一步,所述步骤五中当海浪所属像素区域面积在整张图像中的占比超过设定值 后,生成触发信号,判断海浪是否过高,具体包括: (1)判断η值大小,当50%<η≤100%时,说明此时无人艇遭遇的海浪较大;当0≤η <50%,说明此时无人艇遭遇的海浪较小。 有益效果 本发明是低成本、高效率的海浪检测方法,能对周围海浪大小进行检测以规避风 浪危害。利用本发明的方法能够较完整的标注出海浪的主体,对海浪最高部的小浪花也能 做到很好的一直处理,同时本方法算法简单,计算量小,可以做到实时处理,对嵌入式设备 等算力较低的设备也能够很好的支持,能够极大的拓展其实用性。需要一套低成本、高效率 的海浪检测系统来对周围海浪大小进行检测以规避风浪危害。 附图说明 图1为本发明一种基于图像处理的无人艇检测海浪的方法主流程图; 图2为本发明一种基于图像处理的无人艇检测海浪的方法海浪采集原图; 图3为本发明一种基于图像处理的无人艇检测海浪的方法海浪分割二值化处理 图; 图4为本发明一种基于图像处理的无人艇检测海浪的方法实际效果图。











