
技术摘要:
本发明公开了一种基于密集连接与通道注意力机制的交通标志识别方法,所述方法包括以下步骤:构建数据集并进行数据预处理;通过深度学习框架搭建基于密集连接与注意力机制的交通标志识别神经网络;将训练集中的图片输入神经网络中,通过正向传播得到交通标志类别与位置 全部
背景技术:
在现有基于视觉方法的自动驾驶系统中,目标检测是最为核心的任务,包括车道 线检测、车辆检测、非机动车检测、行人检测、交通标志检测等。在实际道路上行驶,自动驾 驶车辆必须要遵守交通规则,需要根据交通标志和道路的实际情况等做出判断,但面对复 杂多变的道路场景,车辆需要从周围的环境中获取规范行驶的“提示”,因此,交通标志检测 算法是自动驾驶系统中不可或缺的一部分。由于交通标志形状规则、颜色鲜明,因此在研究 早期,国内外学者针对交通标志识别问题主要结合多种图像处理的方法来解决。近年来,随 着对神经网络的不断深入研究,深度学习方法被更多地应用到自动驾驶领域中,并占据了 重要地位。 基于深度学习的交通标志识别算法准确率高,能够更好地应对遮挡、雨雪天气等 特殊情况。目前基于卷积神经网络的常用交通标志识别方法有Faster-RCNN[1]、SSD[2]和 YOLO[3]等。专利“一种基于SRCNN的交通标志识别方法”(CN110321803A),能提高低分辨率图 像识别准确率且具有计算量小的优点。专利“一种基于改进SSD网络的交通标志识别方法” (CN110287806A)旨在提高SSD网络对小目标的检测率,实现SSD算法对小型交通标志的检 测。 在交通标志识别的领域,锚框常被看做是一组不同大小的先验框,由于具有启发 性的先验信息,在Faster RCNN和SSD等框架中发挥了巨大的作用。神经网络通常需要生成 一组非常大的锚框,其中只有小部分与真值ground truth重叠,这在正负样本之间造成了 巨大的不平衡,减慢了训练速度。 参考文献 [1]Ren S,He K,Girshick R,et al.Faster r-cnn:Towards real-time object detection with region proposal networks[C]//Advances in neural information processing systems.2015:91-99. [2]Huang J,Rathod V,Sun C,et al.Speed/accuracy trade-offs for modern convolutional object detectors[C]//Proceedings of the IEEE conference on computer vision and pattern recognition.2017:7310-7311. [3]Redmon J ,Divvala S,Girshick R ,et al .You only look once:Unified , real-time object detection[C]//Proceedings of the IEEE conference on computer vision and pattern recognition.2016:779-788.
技术实现要素:
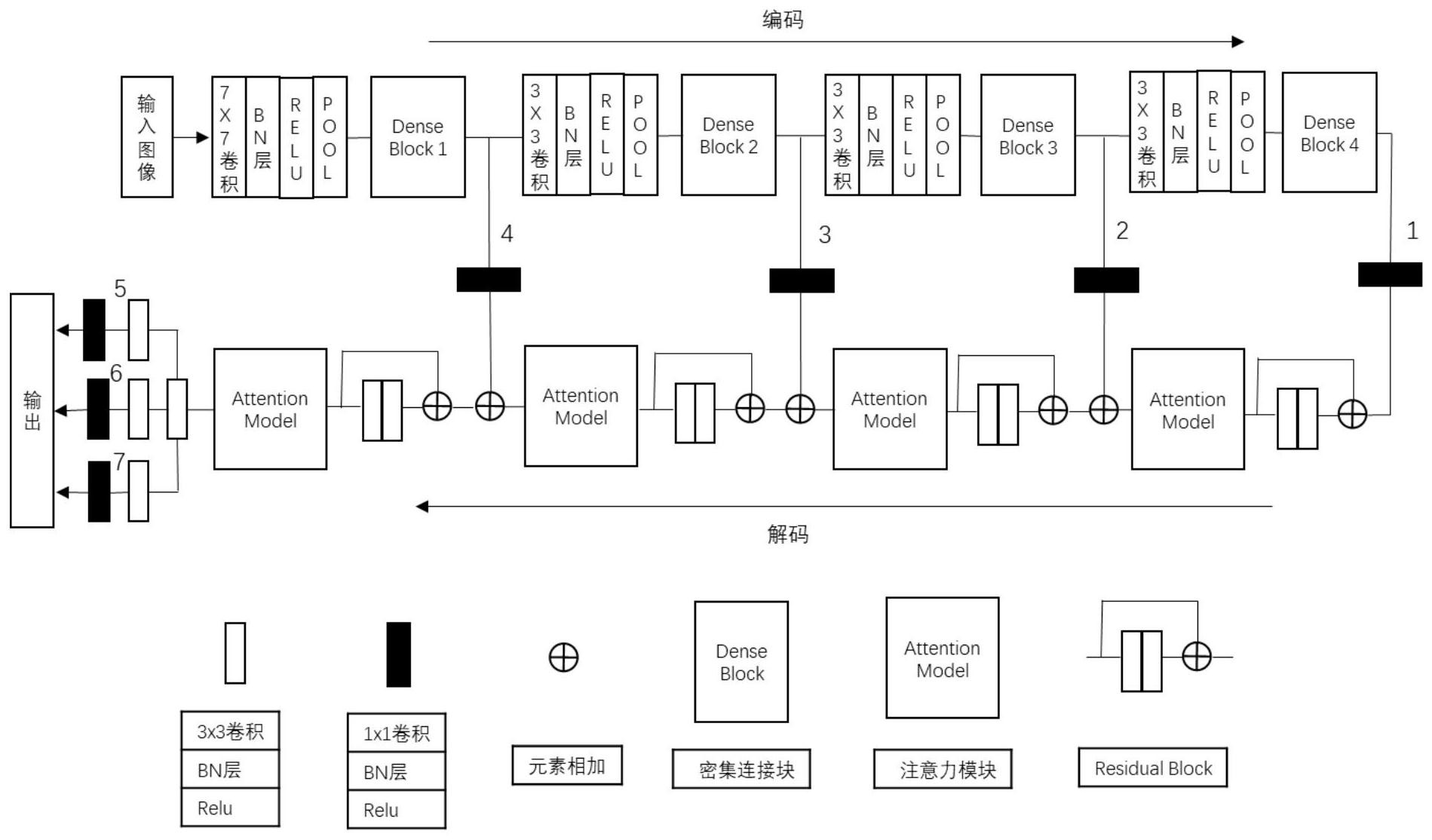
本发明提供了一种基于密集连接与注意力机制的交通标志识别方法,本发明舍弃 3 CN 111582029 A 说 明 书 2/7 页 了锚框使用密集连接网络DenseNet121作为骨干网络进行特征提取,并引入了通道注意力 机制,详见下文描述: 一种基于密集连接与通道注意力机制的交通标志识别方法,所述方法包括以下步 骤: 构建数据集并进行数据预处理; 通过深度学习框架搭建基于密集连接与注意力机制的交通标志识别神经网络; 将训练集中的图片输入神经网络中,通过正向传播得到交通标志类别与位置信 息,与真值中的信息计算误差并进行反向传播,不断更新网络参数直至误差不再减小; 输入带有交通标志的图片,加载训练好的模型,输出交通标志识别结果图。 其中,所述通过深度学习框架搭建基于密集连接与注意力机制的交通标志识别神 经网络包括: 编码路径、解码路径、输出预测部分和四条并联支路,共同构成了一个U型的编解 码网络。 进一步地,所述解码路径分为四部分, 每部分均由一个残差块与一个通道注意力模块构成;解码路径的特征图会先经过 残差块后再进入通道注意力模块,用于增大有效通道的权重,同时减小无效通道的权重。 其中,所述并联支路共有四条, 第一条支路将编码路径第四部分的输出输入解码路径; 第二条支路将编码路径第三部分的输出与解码路径第一部分的输出进行特征融 合,作为解码路径第二部分的输入; 第三条支路将编码路径第二部分的输出与解码路径第二部分的输出进行特征融 合,输入解码路径第三部分; 第四条支路将编码路径第一部分的输出与解码路径第三部分的输出进行特征融 合,输入解码路径的第四部分。 进一步地,所述输出预测部分由另外三条支路并联构成, 第五条支路在经过两个卷积块后,会得到一个N通道的特征图,N为交通标志的类 别数量,通过N通道的特征图来计算交通标志属于N个类别的概率; 第六条支路在经过两个卷积块后会得到一个两通道的特征图,对特征图的两个通 道计算便会得到两个点X与Y,能够预测出一个坐标,即交通标志的中心点坐标; 最后一条支路也经过两个卷积块后得到一个两通道的特征图,对特征图的两个通 道计算便会得到两个值w与h,即交通标志检测框的宽和高。 本发明提供的技术方案的有益效果是: 1、采用DenseNet121作为骨干网络进行特征提取,使用密集连接方式,每个层都会 接受其前面所有层作为其额外的输入;DenseNet实现了特征重用,参数更小且计算更高效, 同时提升了梯度的反向传播,使得网络更容易训练; 2、采用U型的编码解码网络,可以将网络的深层特征与浅层特征融合在一起,对不 同尺度的交通标志进行检测;反复进行的编解与解码操作,充分利用了网络的深层特征,使 网络具有更强的表示能力,可以更好的混合全局和局部信息; 3、在解码网络中,每个特征融合支路前,引入通道注意力模块,充分过滤无用的通 4 CN 111582029 A 说 明 书 3/7 页 道信息,保留有益的信息融合到特征图中,提高交通标志识别的准确率;同时,解码网络中 使用了大量的残差结构,可以提升网络的非线性能力,解决网络退化问题; 4、本发明的通道注意力模块中同时使用了平均池化和最大池化,并将两种池化结 合到一起,增大有效通道权重,减少无效通道的权重。 附图说明 图1为基于密集连接与注意力机制的交通标志识别方法的神经网络整体结构图; 图2为密集连接模块Dense Block的神经网络结构示意图; 图3为注意力模块的神经网络结构示意图; 图4为基于密集连接与注意力机制的交通标志识别方法的识别效果图。











