
技术摘要:
本发明实施例公开了一种车辆转弯控制方法、装置、车辆及存储介质。其中,该方法包括:接收通过定位导航系统所捕获的车辆当前位置信息和车辆所处目标弯道中的目标路点信息,以及通过设定传感器捕获的所述车辆的当前车速信息;根据所述当前位置信息、目标路点信息以及当 全部
背景技术:
随着现代科学技术和传感器技术的发展,自动驾驶技术也出现了飞速发展。在自 动驾驶技术中,轨迹跟踪控制的优劣决定了自动驾驶车辆行驶性能的好坏。而在车辆的轨 迹跟踪控制中,车辆转弯控制是尤其重要的。 现有的车辆轨迹跟踪控制算法是比例积分微分(Proportional Integral Derivative,简称PID)算法,PID算法根据给定值和实际输出值构成控制偏差,将偏差按比 例、积分和微分通过线性组合构成控制量,对被控对象进行控制。 但是采用上述控制算法的车辆在轨迹跟踪时,尤其是车辆转弯控制时,不能通过 曲率较大的弯道,特别是在弯道后期,方向盘容易出现抖动,舒适性较差。
技术实现要素:
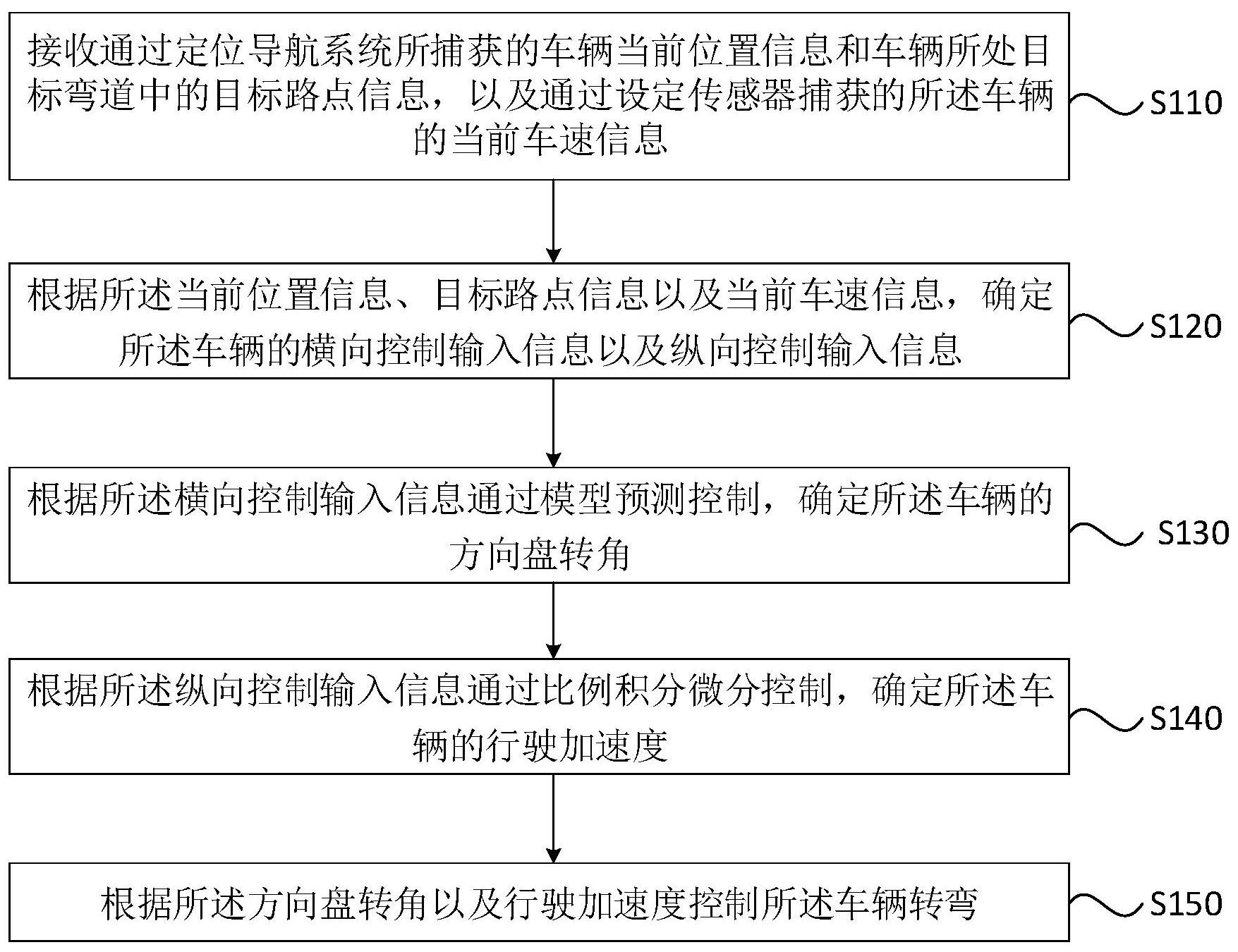
本发明实施例提供了一种车辆转弯控制方法、装置、车辆及存储介质,使得车辆转 弯控制时能够通过曲率较大的弯道,提高了稳定性和舒适性。 第一方面,本发明实施例提供了一种车辆转弯控制方法,该方法包括: 接收通过定位导航系统所捕获的车辆当前位置信息和车辆所处目标弯道中的目 标路点信息,以及通过设定传感器捕获的所述车辆的当前车速信息; 根据所述当前位置信息、目标路点信息以及当前车速信息,确定所述车辆的横向 控制输入信息以及纵向控制输入信息; 根据所述横向控制输入信息通过模型预测控制,确定所述车辆的方向盘转角; 根据所述纵向控制输入信息通过比例积分微分控制,确定所述车辆的行驶加速 度; 根据所述方向盘转角以及行驶加速度控制所述车辆转弯。 第二方面,本发明实施例提供了一种车辆转弯控制装置,该装置包括: 信息接收模块,用于接收通过定位导航系统所捕获的车辆当前位置信息和车辆所 处目标弯道中的目标路点信息,以及通过设定传感器捕获的所述车辆的当前车速信息; 信息确定模块,用于根据所述当前位置信息、目标路点信息以及当前车速信息,确 定所述车辆的横向控制输入信息以及纵向控制输入信息; 转角确定模块,用于根据所述横向控制输入信息通过模型预测控制,确定所述车 辆的方向盘转角; 加速度确定模块,用于根据所述纵向控制输入信息通过比例积分微分控制,确定 所述车辆的行驶加速度; 转弯控制模块,用于根据所述方向盘转角以及行驶加速度控制所述车辆转弯。 4 CN 111731307 A 说 明 书 2/8 页 第三方面,本发明实施例提供了一种车辆,该车辆包括: 定位导航系统,用于对车辆进行位置确定和路径指导; 至少一个车辆传感器,用于对车辆工作状态参数的测量和实现车辆的自动控制; 方向盘,用于控制车辆的方向; 一个或多个控制器,用于对车辆进行控制; 存储装置,用于存储一个或多个程序; 当所述一个或多个程序被所述一个或多个控制器执行,使得所述一个或多个控制 器实现本发明任意实施例所述的车辆转弯控制方法。 第四方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程 序,该程序被控制器执行时实现本发明任意实施例所述的车辆转弯控制方法。 本发明实施例提供了一种车辆转弯控制方法、装置、车辆及存储介质,首先接收通 过定位导航系统所捕获的车辆当前位置信息和车辆所处目标弯道中的目标路点信息,以及 通过设定传感器捕获的所述车辆的当前车速信息,接着根据所述当前位置信息、目标路点 信息以及当前车速信息,确定所述车辆的横向控制输入信息以及纵向控制输入信息,然后 根据所述横向控制输入信息通过模型预测控制,确定所述车辆的方向盘转角,根据所述纵 向控制输入信息通过比例积分微分控制,确定所述车辆的行驶加速度,最后根据所述方向 盘转角以及行驶加速度控制所述车辆转弯,使得车辆转弯控制时能够通过曲率较大的弯 道,避免了方向盘出现抖动的情况,提高了车辆行驶过程中的安全性、稳定性和舒适性。 附图说明 图1A为本发明实施例一提供的一种车辆转弯控制方法的流程图; 图1B为本发明实施例一提供的方法中车辆的横向控制输入信息以及纵向控制输 入信息的确定过程的流程图; 图2为本发明实施例二提供的一种车辆转弯控制装置的结构示意图; 图3为本发明实施例三提供的一种车辆的结构示意图。











