
技术摘要:
本发明提出了一种基于非线性扰动观测器的四旋翼飞行器滑模控制方法,考虑到四旋翼飞行器存在系统不确定性和外部扰动的影响,首先建立起考虑外部扰动的四旋翼动力学模型,并提出了一种非线性扰动观测器来估计外部扰动的实际值,本发明为了保证四旋翼飞行器的稳定性,根 全部
背景技术:
四旋翼飞行器是通过改变电机转速获得旋转机身的力,从而调整自身姿态。与传 统飞行器相比,四旋翼具有成本低、可控性强、操作简单、维护方便等显著优点。因此,四旋 翼被用于完成各种任务,如空中物流,电网维护,农药喷洒,航空摄影等。然而,由于四旋翼 的欠驱动特性、非线性耦合、陀螺仪效应以及与不确定飞行环境相关的外部干扰等特性,所 以四旋翼飞行控制系统的设计是一项颇具挑战性的工作。在实际应用中,四旋翼容易受到 外界干扰的影响,容易造成姿态计算的较大偏差,从而使得四旋翼失去控制,造成飞行器毁 坏等重大的损失甚至会对地面人员的人身安全造成威胁。因此,在设计控制器时必须考虑 外部干扰对飞行控制系统稳定性的影响。 滑模控制被认为是一种对系统不确定性和外部干扰具有高鲁棒性的非线性控制 方法,它的控制是不连续的,这种控制策略与其它控制的不同之处在于系统的“结构”并不 固定,而是可以在动态过程中根据系统当前的状态有目的地不断变化,迫使系统按照预定 “滑动模态”的状态轨迹运动。当系统处于滑动状态,此时系统动力学行为与控制律无关,且 对系统内部参数不确定和外部扰动完全不敏感,这就使得变结构控制具有快速响应、对参 数变化及扰动不灵敏、无需系统在线辩识,物理实现简单等优点。该方法的缺点在于当状态 轨迹到达滑模面后,难于严格地沿着滑模面向着平衡点滑动,而是在滑模面两侧来回穿越, 从而产生颤动,即抖振问题。 终端滑模以其动态响应速度快、有限时间收敛、稳态跟踪精度高等优点,得到广泛 应用。但是在实际应用时,在某个特定的区域,控制输入会出现无穷大的情况,即产生奇异 现象。为了解决终端滑模控制的奇异性问题,于是有学者提出了非奇异终端滑模来消除系 统控制输入中的奇异现象。由于外界的扰动及不确定项是滑模控制中抖振的主要来源,利 用观测器来消除干扰及不确定项已经成为解决抖振问题研究的重点。
技术实现要素:
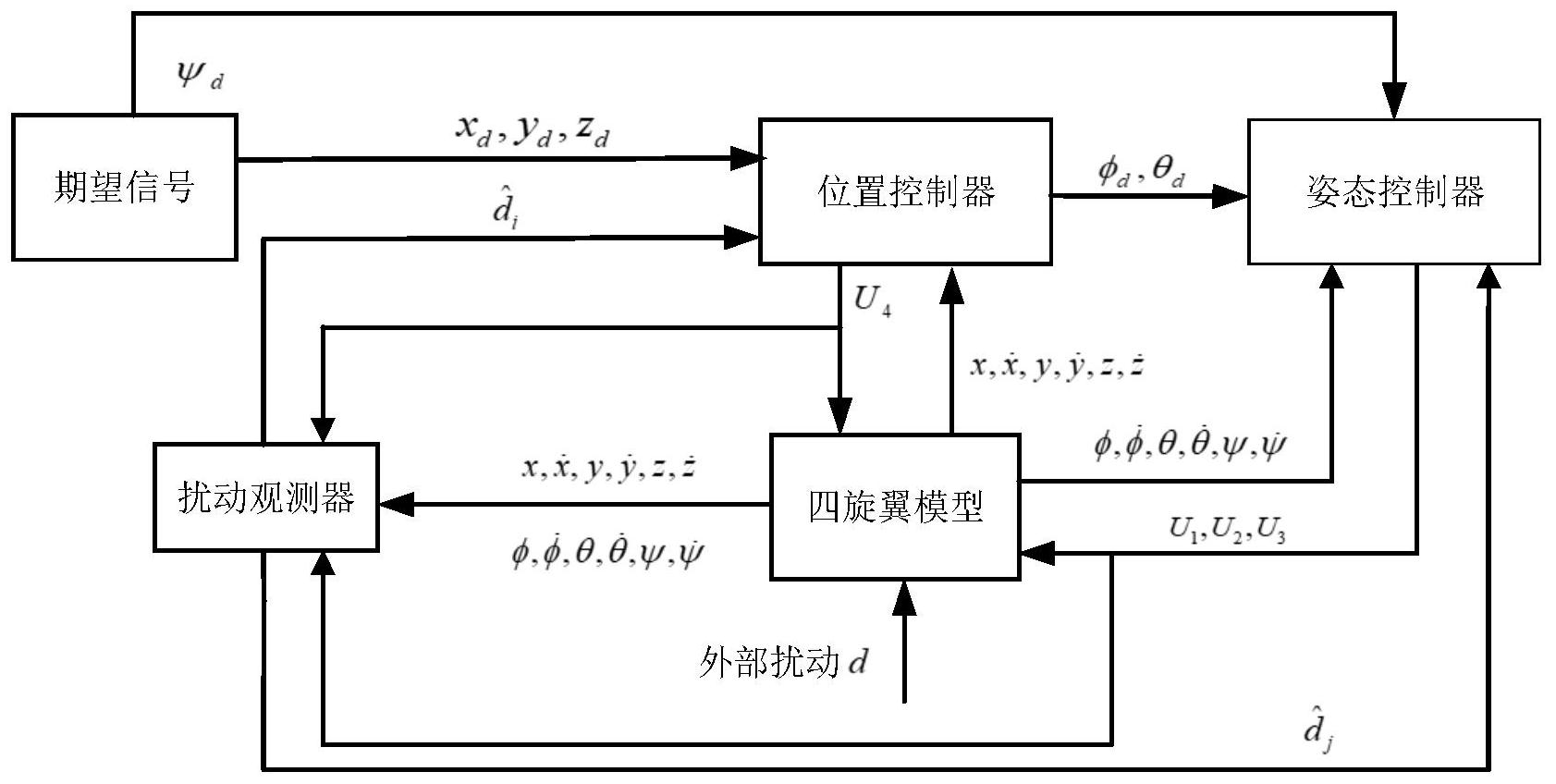
本发明所要解决的技术问题是为了解决现有技术的不足,针对四旋翼无人机系统 的不确定性和外部扰动的问题,提供了一种能够对未知外部扰动进行精确估计,并可以使 系统具有自主消除外部扰动影响的能力,达到期望姿态、位置控制目标的四旋翼飞行器控 制技术。 为解决上述问题,本发明的技术解决方案提出一种基于非线性扰动观测器的四旋 翼飞行器滑模控制方法,通过以下步骤实现: 步骤1、建立四旋翼飞行器的动力学模型,将无人机系统分为姿态子系统和位置子 系统,该动力学模型具体如下, 7 CN 111722634 A 说 明 书 2/12 页 其中,飞行器三个姿态的欧拉角度表示为[φ,θ,ψ],分别代表滚转角、俯仰角和偏 航角;飞行器质心在惯性坐标系中的位置坐标表示为[x,y,z];ai为常数并且i=1,...,9, S(*)表示sin(*),C(*)表示cos(*),U1为滚转角的控制输入,U2为俯仰角的控制输入,U3为偏航 角的控制输入,U4为位置系统的控制输入,g为重力系数; 步骤2、建立四旋翼飞行器扰动模型,根据步骤1可以建立如下模型,具体如下: 其 中 , i = 1 , 2 , 3 ,j = 4 , 5 , 6 , f(x2i)和f(x2j)为非线性项,具体表达式如下: 步骤3、在考虑外部扰动的情况下,设计了一个非线性扰动观测器来估计外部扰动 的实际值,对姿态子系统和位置子系统分别设计非线性扰动观测器,具体表达式如下: 其中,zi,zj分别是姿态子系统和位置子系统观测器的状态变量;Li,Lj分别是姿态 子系统和位置子系统观测器的增益; 分别是姿态子系统和位置子系统外部扰动的估 计值; 步骤4、根据步骤3得到姿态子系统外部扰动的估计信息,设计姿态子系统的基于 8 CN 111722634 A 说 明 书 3/12 页 非奇异快速终端滑模的控制器; 步骤5、根据步骤3得到位置子系统外部扰动的估计信息,设计位置子系统的基于 backstepping非奇异快速终端滑模的控制器,并通过设计中间虚拟量反解出位置子系统控 制率以及期望姿态角。 作为本发明的进一步技术方案,在步骤1中,ai的具体表达式为: 其中,m为四旋翼飞行器的质量,Ix为x轴的转动惯量,Iy为y轴的转动惯量,Iz为z轴 的转动惯量,dx、dy、dz、dφ、dθ、dψ均为阻力系数; U1、U2、U3、U4满足以下条件: 其中,Ω1,Ω2,Ω3,Ω4为电机的转速,l为电机到机体重心的距离,κ为拉力系数。 作为本发明的进一步技术方案,在步骤2中,外部扰动d i , j满足有界且 而且外部扰动的导数 满足有界且 作为本发明的进一步技术方案,在步骤3中,验证系统非线性扰动观测器的稳定 性,包含以下步骤: S301、定义姿态子系统非线性扰动观测器的估计误差为 S302、对 进行求导可得, S303、同理,位置子系统非线性扰动观测器的扰动估计 的导数为, S304、当两个子系统的观测器的增益Li,Lj为正整数时,设计的非线性扰动观测器 所估计的 能够渐进的跟踪扰动的实际值di,j; 作为本发明的进一步技术方案,在步骤4中,设计的姿态子系统控制器,具体如下: S401、根据下式设计非奇异快速终端滑模面si(i=1,2,3), 9 CN 111722634 A 说 明 书 4/12 页 其中,e1=φ-φd ,e2=θ-θd ,e2=ψ-ψd为实际姿态角与期望姿态角之间的跟踪误 差,φ,θ,ψ为实际姿态角,φd,θd,ψd为期望姿态角;λi,γ均为滑模参数,满足λi>0,1<γ< 2; S402、根据下式设计趋近律 其中,ki>0,0<α<1; S403、结合步骤S1中所设计的滑模面、步骤S2中所设计的趋近律以及姿态子系统 的模型,根据下式设计姿态子系统的控制输入U1,U2,U3:: 作为本发明的进一步技术方案,在步骤5中,设计的位置子系统控制器,具体如下: S501、定义位置x,y,z的跟踪误差为, ε1=x-xd ε3=y-yd ε5=z-zd 其中,x,y,z分别表示实际位置,xd,yd,zd分别表示期望位置; S502、位置x,y,z三个控制器具有相同的步骤和形式,下面以x通道控制器设计为 例,位置x稳定函数的选取为, 其中,v1,v2为正数,p,q为正奇数且满足q<p, 位置x跟踪误差的导数 定义为, S503、第一个Lyapunov函数定义为, 对上式求导可得, 对上式求导可得, 结合位置子系统模型,可得, 10 CN 111722634 A 说 明 书 5/12 页 S504、根据下式设计非奇异快速终端滑模面s4, s4=ε1 ε2 S505、第二个Lyapunov函数定义为, S506、结合步骤S505选取的Lyapunov函数,设计虚拟控制量Ux为, 同理,位置y,z稳定函数的选取为 位置y,z跟踪误差的导数 定义为, 根据下式设计非奇异快速终端滑模面s5,s6, s5=ε3 ε4 s6=ε5 ε6 设计的虚拟控制律Uy,Uz为, S507、给定偏航角的期望信号ψd,通过步骤S4所设计的姿态控制器,有ψ→ψd,因而 利用虚拟控制量可以获得, 其中,φd和θd作为期望信号用于姿态角控制器的设计;U4为位置子系统控制输入; ψd取 本发明采用以上技术方案与现有技术相比,具有以下技术效果: 11 CN 111722634 A 说 明 书 6/12 页 (1)本发明设计了非线性扰动观测器,用于处理外部未知扰动,能够精确估出外部 扰动的实际值; (2)本发明设计了姿态子系统的控制器,利用非线性扰动观测器在线估计扰动值, 并且结合非奇异快速终端滑模面的设计,可以克服现有终端滑模控制的奇异性和不连续 性; (3)本发明设计了位置子系统的控制器,利用非线性扰动观测器在线估计扰动值, 并结合了backstepping方法和非奇异快速终端滑模方法通过设计虚拟中间控制量反解出 控制率,有效的通过一个控制输入完成对三个状态量的控制; (4)本发明设计的方法具有较强的鲁棒性,可以准确实时的对外部未知扰动进行 估计,并使四旋翼无人机在发生传感器故障时快速准确地跟踪上控制目标,更具有实际意 义。 附图说明 图1为本发明实施例中所述基于非线性扰动观测器的四旋翼飞行器滑模控制方法 的流程图; 图2为本发明中实施例中所述滚转角、俯仰角、偏航角中外部扰动的真实值与估计 值的对比仿真图; 图3为本发明中实施例中所述位置x、y、z中外部扰动的真实值与估计值的对比仿 真图; 图4为本发明中实施例中所述存在外部扰动的条件下滚转角、俯仰角、偏航角跟踪 曲线图; 图5为本发明中实施例中所述存在外部扰动的条件下位置x、y、z跟踪曲线图; 图6为本发明中实施例中所述飞行器跟踪轨迹图。











