
技术摘要:
本发明公开一种微型智能矿山全自动液压履带行走混凝土喷射机器人。包括:履带式行走机架;在所述的机架上设置有:电机、回转支承座、空气压缩机和速凝剂泵;在所述的回转支承座上设置有回转支承,回转支承上设有回转支承马达和转塔;所述转塔上设置有臂架和俯仰油缸。 全部
背景技术:
: 目前矿山、煤矿井下隧道混凝土施工,主要有以下几种方式:一是扎架子人工施 工,二是用混凝土湿喷机在出料口加装喷头,人工手持喷头喷涂或用简易支架支撑喷头,人 工操作施工,其中第一种方式,需要的人多,占地面积大,劳动强度大,施工效率低,施工质 量差,施工周期长,第二种施工方式,设备移动不方便,有的混凝土湿喷机采用矿轮在机车 轨道上移动,但占用轨道,影响机车运行,影响正常生产,已属禁行。由于混凝土湿喷机上的 喷头,是人工手持喷头,喷射的喷头处有冲击,需要多人短时间内轮换手持喷头施工,劳动 强度大,人多,操作极不方便,并且喷头离工作面距离远,施工质量差,效率低,对各种工作 面的适应性能差。这两种施工方式,都需要施工人员在工作面现场施工,在喷射时产生的大 量污尘,对人体危害极大,不环保、不智能,工作范围少。
技术实现要素:
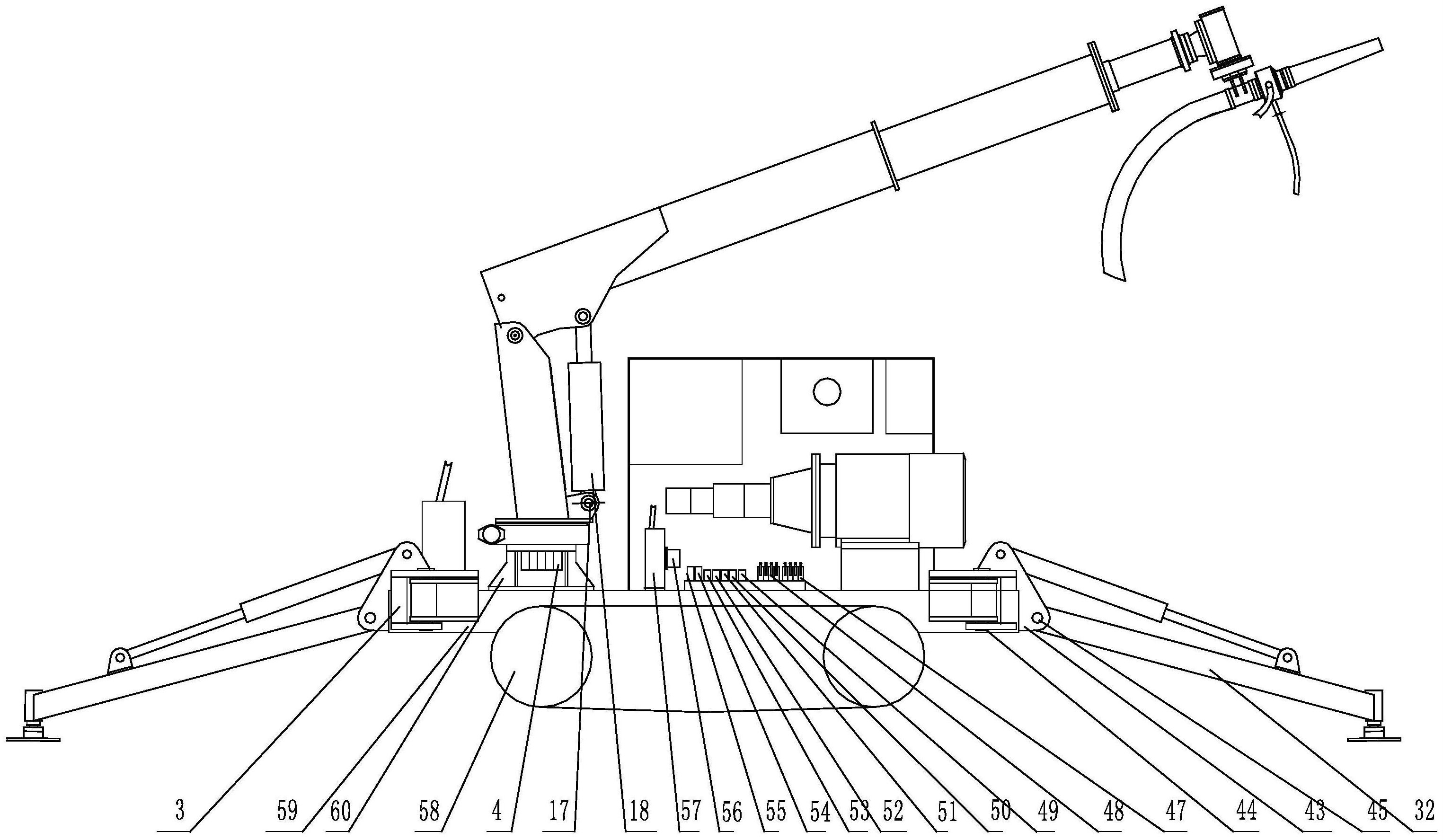
本发明的目的是提供一种微型智能矿山全自动液压履带行走混凝土喷射机器人, 体积小,能在狭窄的空间、高低不平的地面上行走,臂架能360°旋转,上下俯仰,自动伸缩, 喷头能360°旋转,左右240°摆动,它能将需要的混凝土全方位,不留死角的喷射到工作面 上,适应各种矿山狭窄的隧道、巷道工作而施工,使用面广,能远距离无线遥控操作,近距离 喷射到工作面上,能大大提高施工效率,施工质量。且环保、节能,智能化操作。 为达到上述目的,本发明的微型智能矿山全自动液压履带行走混凝土喷射机器 人,包括:履带式行走机架;在所述的履带式行走机架上设置有:电机、回转支承座、空气压 缩机和速凝剂泵; 在所述的回转支承座上设置有回转支承,回转支承上设有回转支承马达和转塔;, 所述转塔上设置有臂架和俯仰油缸。所述俯仰油缸一端与转塔铰接,另一端与所述臂架铰 接; 所述臂架内设置有伸缩臂架和伸缩臂架油缸,所述伸缩臂油缸一端与所述臂架相 铰接,另一端与伸缩臂架相铰接,所述伸缩臂架前端设置有喷头旋转马达,所述喷头旋转马 达前端设置有喷头摆动马达,所述喷头摆动马达上设置有喷管和混合室,所述喷管接外来 混凝土料,所述混合室上设置有喷头、风管和速凝剂软管,所述风管另一端与空气压缩机相 连接,所述速凝剂软管另一端与速凝剂泵相连接。 进一步的,所述的履带式行走机架包括机架,机架两侧安装有两套平行设置的履 带Ⅰ和履带Ⅱ,所述履带Ⅰ和履带Ⅱ上均设置有行走马达。 进一步的,在所述的履带式行走机架上安装有多个支腿转架;每个支腿转架由支 腿和支腿外摆油缸组成,在所述支腿上设置有支腿油缸和支脚,所述支腿油缸一端与所述 4 CN 111608694 A 说 明 书 2/5 页 支腿转架铰接,另一端与所述支腿铰接,所述支腿外摆油缸一端与所述机架铰接,另一端与 所述支腿转架上铰接。 进一步的,所述电机与柱塞泵Ⅰ、柱塞泵Ⅱ、齿轮泵Ⅰ和齿轮泵Ⅱ相连接,所述柱塞 泵Ⅰ通过管路Ⅰ与行走马达Ⅰ,俯仰油缸、伸缩油缸、回转支承马达、喷头旋转马达和喷头摆动 马达相连接,可通过所述柱塞泵Ⅰ向所述行走马达Ⅰ、俯仰油缸、伸缩油缸、回转支承马达、喷 头旋转马达和喷头摆动马达进行供油;所述柱塞泵II通过管道II与所述行走马达II相连 接,通过所述柱塞泵II向所述的行走马达II进行供油,所述齿轮泵Ⅰ通过管III与所述的冷 却器马达、支腿油缸I、支腿油缸II、支腿油缸III、支腿油缸IV、支腿I外摆油缸、支腿II外摆 油缸、支腿Ⅲ外摆油缸和支腿Ⅳ外摆油缸相连接,可通过所述齿轮泵Ⅰ向所述的冷却器马 达、支腿油缸Ⅰ、支腿油缸Ⅱ、支腿油缸Ⅲ、支腿油缸Ⅳ、支腿Ⅰ外摆油缸、支腿II外摆油缸、支 腿Ⅲ外摆油缸和支腿Ⅳ外摆油缸进行供油; 所述的齿轮泵Ⅱ通过管路Ⅳ与所述的速凝剂马达相连接,可通过所述齿轮泵Ⅱ向 所述的速凝剂马达进行供油。 进一步的,所述柱塞泵Ⅰ与俯仰油缸、伸缩臂架油缸、回转支承马达,喷头旋转马 达,喷头摆动马达之间设有电磁换向阀Ⅰ、和负敏感多路阀,以可调控的向俯仰油缸、伸缩臂 架油缸、回转支承马达,喷头旋转马达和喷头摆动马达进行供油,所述柱塞泵I与所述行走 马达I之间电磁换向阀Ⅰ、履带I电液控换向阀,以可调控的向所述行走马达II进行供油,所 述柱塞泵Ⅱ与行走马达Ⅱ之间设有电磁换向阀Ⅱ、履带Ⅱ电液控换向阀,以可调控的向所 述行走马达Ⅱ进行供油。 进一步的,所述齿轮泵Ⅰ与所述冷却器马达之间设有电磁换向阀Ⅲ、电磁换向阀 Ⅳ、以可调控的向所述冷却器马达供油,所述齿轮泵Ⅰ与所述支腿油缸Ⅰ、支腿油缸Ⅱ、支腿 油缸Ⅲ、支腿油缸Ⅳ之间设有电磁换向阀Ⅳ,支腿油缸电控多路阀,以可调控的向所述支腿 油缸Ⅰ、支腿油缸Ⅱ、支腿油缸Ⅲ、支腿油缸Ⅳ供油;所述齿轮泵Ⅰ与所述的支腿Ⅰ外摆油缸、 支腿II外摆油缸、支腿Ⅲ外摆油缸、支腿Ⅳ外摆油缸之间设有电磁换向阀Ⅳ、支腿油缸电控 多路阀、支腿外摆油缸电控多路阀,以可调控向所述的支腿Ⅰ外摆油缸、支腿II外摆油缸、支 腿Ⅲ外摆油缸、支腿Ⅳ外摆油缸进行供油,所述齿轮泵Ⅱ与速凝剂泵马达之间设有电磁换 向阀Ⅴ,速凝剂泵调速阀,以可调控的向所述速凝剂泵马达供油。本发明所提供的一种微型 智能矿山全自动液压履带行走混凝土喷射机器人,它包括机架,该机架上设有电机、护罩、 回转支承座,空气压缩机、速凝剂泵、行走系统、支腿Ⅰ转架、支腿Ⅱ转架、支腿Ⅲ转架、支腿 Ⅳ转架。 进一步的,进一步的,在所述的机架上设置有护罩,所述的护罩上设有油箱、冷却 器、电控箱;所述冷却器上设有冷却器马达,所述冷却器马达与所述电机相连接。 本发明由一个电机驱动,全液压传动,体积小,微型,智能自动化程度高,履带自行 走,整机具有六个自由度,适应各种工作面的混凝土喷射,能全方位,无死角的将混凝土喷 射到需要的位置能远距离无线遥控操作,近距离喷射,安全、环保、节能、大大降低了劳动强 度,提高了施工效率和施工质量。 附图说明: 图1为本发明的主视图 5 CN 111608694 A 说 明 书 3/5 页 图2为图1中的沿A-A线的剖视图(去掉转塔以上部分,支腿放下状态) 图3为图1中沿A-A线的剖视图(去掉转塔以下部分,支腿放下外摆状态) 图4为本发明支腿支撑、臂架伸出仰起的工作状态。 图5为图1中沿B-B的剖视图 图6为本发明的液压原理图 图7为本发明的电器原理阀











