
技术摘要:
本发明提供了一种基于无人机航拍的智慧城市CIM道路贴图方法,其步骤为:构建城市的CIM;利用无人机获取航拍图像;基于卷积神经网络提取航拍图像中的特定关键点,特定关键点包括道路花坛中心点和车道线角点;将得到的关键点采用暴力匹配算法匹配后进行图像配准和图像融 全部
背景技术:
智慧城市的产生源自物联网、云计算、移动互联网、人工智能为代表的新一代信息 技术与知识社会环境下逐步孕育的开放的城市创新生态。智慧城市强调的是利用新一代信 息技术和各类通信终端融合,实现城市智慧式管理和运行。城市建设应抓住技术带来的便 利,依托BIM等信息化技术,构建城市专属CIM模型,不断整合资源,找准定位,探索智慧城市 建设新路径,提升城市服务水平和服务质量。在城市三维建模技术中,模型的贴图是建模中 的一个十分重要的组成部分,它可以赋予模型纹理,给人以更真实、更直观的视觉感受。 目前在三维建模方面,模型的贴图主要通过人为制作或相机拍摄等手段,存在时 间长、成本高等问题。而现有特征提取技术如SIFT算法、SURF算法、ORB算法等,在提取特征 时,其提取的特征点不是特定的,因此存在耗时长、计算复杂的问题。
技术实现要素:
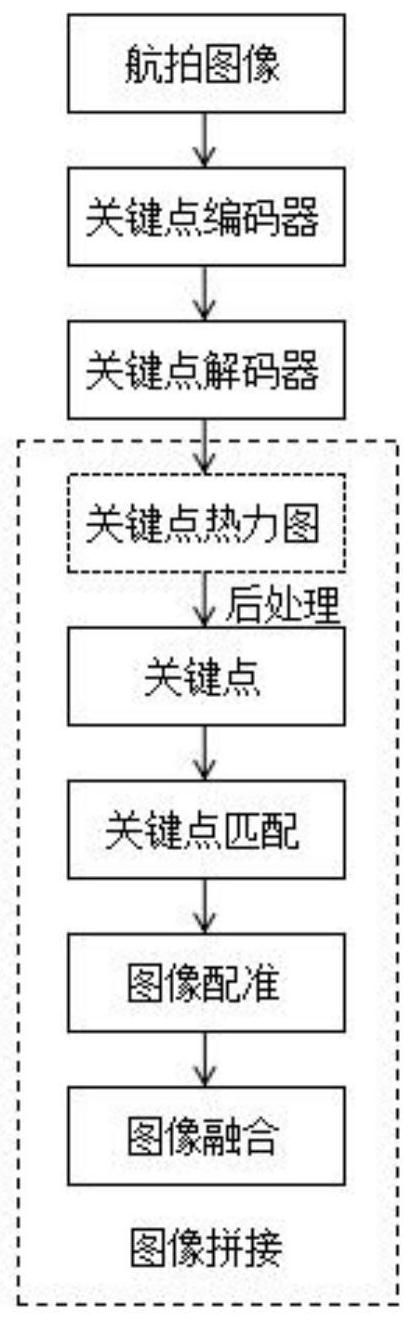
本发明针对上述现有获取三维模型贴图技术存在的问题,提出了一种基于无人机 航拍的智慧城市CIM道路贴图方法,其步骤为: 步骤一,构建城市的CIM; 步骤二,获取航拍图像,其中,航拍图像是利用图像采集装备采集到的城市地面道 路图像,图像采集装备设置在无人机上; 步骤三,基于卷积神经网络对步骤二中采集到的城市地面道路图像进行处理得到 关键点热力图,卷积神经网络包括关键点编码器和关键点解码器,关键点编码器的输入为 归一化后的航拍图像,进行特征提取,输出为特征图,关键点解码器对特征图进行上采样与 特征提取,得到关键点热力图;对关键点热力图进行后处理,得到关键点坐标,完成特定关 键点的提取,其中,特定关键点包括道路花坛中心点和车道线角点;关键点热力图的像素值 值域为[0,1]之间的浮点数,进行可视化时需要将像素值乘255; 步骤四,对得到的特定关键点采用匹配算法进行关键点匹配,得到航拍图像的匹 配点集,其中,匹配算法具体步骤为:对两张图像进行关键点匹配时,在其中一张图像中选 取一个关键点,依次与另一张图像中的每个关键点进行距离测试,返回另一张图像中与该 关键点距离最近的关键点,按照此步骤完成图像中所有关键点的匹配; 步骤五,根据匹配点集对航拍图像进行图像配准和图像融合操作完成图像拼接, 得到完整的城市道路航拍图像,其中,需要进行图像拼接操作的图像存在重叠区域; 步骤六,将所述完整的城市道路航拍图像投影到CIM中,并结合Web GIS技术进行 可视化处理。 城市道路的CIM以三维的城市空间地理信息为基础,并在此基础上叠加城市建筑、 3 CN 111599007 A 说 明 书 2/4 页 地上地下设施的BIM信息以及城市物联网信息。 卷积神经网络的训练:选择图像采集装备采集到的航拍图像作为训练数据集,以 航拍图像中特定关键点进行高斯核卷积后得到的热斑标注数据集,采用L2损失函数进行网 络的训练。 步骤五根据得到的匹配点集求出将航拍图像转换到同一坐标系的单应性变换矩 阵,根据求出的单应性变换矩阵进行图像配准,对配准以后的图像进行加权融合,完成图像 拼接。 本发明的有益效果在于: 1.现有图像拼接特征提取技术提取特征点的实时性不高,并且对于边缘光滑目标 特征点的提取能力较弱,且提取的特征点不是特定的,而本发明是对道路图像进行拼接,采 集到的道路图像中其他多余的干扰特征较少,因此相对于传统方法提取非特定的关键点, 本发明只需提取图像中的特定关键点就可以达到预期的图像拼接效果,由于该方法在航拍 图像中选取的关键点是特定的,其在进行关键点匹配时的匹配速度更快,稳定性更好,匹配 准确率更高。 2.本发明采用卷积神经网络对图像进行处理,获取航拍图像中的特定关键点,相 较于现有提取关键点的方法,基于卷积神经网络提取关键点的计算能力更强,处理速度更 快,并且其关键点提取的准确率更高,有效缩短了提取关键点所需的时间,并且卷积神经网 络可以利用数据增强技术来提高模型的泛化能力,增强神经网络的鲁棒性。 3.本发明采用无人机对城市道路进行图像采集,不受交通情况的影响,解决了通 过人为制作或相机拍摄时间长、成本高的问题,而且利用无人机对道路进行拍摄,得到的即 为俯视图,因此可以更方便地实现道路的贴图。 附图说明 图1为该方法的实施流程图。











