
技术摘要:
本发明涉及一种用于将件货(6‑1、6‑2)存放到存放通道(15)中的方法,在该方法中,通过能够沿货架相对于存放通道(15)在x方向上运动的件货接纳装置(7)以及通过能沿z方向向存放通道中伸出的移送装置(28)将件货传送到存放通道中。移送装置在彼此相对置的端部区域中分别装备 全部
背景技术:
EP 2 234 904 A1公开了一种用于利用移送装置将件货存入具有前后相继设置的 存放位置的用于具有统一长度和宽度尺寸的件货的存放通道的方法。这里,由移送装置将 第一件货朝存放通道中输送到沿存入方向前面的存放位置上。此后,由移送装置将第二件 货朝存放通道中移动到所述前面的存放位置上,并在此时将使第一件货沿存入方向移动到 后面的存放位置上,并将第二件货输送到前面的存放位置上,从而各件货紧密地相互贴靠 地放置在存放通道中。移送装置具有用于存入过程移送机构和用于取出过程的移送机构。 用于将件货存入存放通道或将件货从存放通道取出的移送装置也由EP 2 351 698 B1已知。这种已知的移送装置设置在件货接纳装置上并且在彼此对置的端部区域分别 装备有一个外移送机构和多个在所述外移送机构之间的内移送机构。这里具有第一长度尺 寸(600mm×400mm)的件货在件货接纳装置上定位在一个所述外移送机构和第一内移送机 构或者第二内移送机构之间。这里通过外移送机构向存放通道中使具有第一长度尺寸的件 货运动到最终的深度位置。 EP 2 433 882 A1公开了一种用于将件货存入存放通道或从存放通道取出件货的 方法,其中,件货通过能向存放通道中伸出的移送装置将多个件货作为件货组或单独地依 次从件货接纳装置上移动到沿存放通道的纵向方向前后相继设置的深度位置上。 由AT 7107 U1已知的用于将件货存入存放通道或从存放通道取出件货的移送装 置仅包括设置在彼此相对置的端部区域中的外移送机构。 8 CN 111605951 A 说 明 书 2/21 页 与此相对,US 2003/0185656 A1公开了一种用于将件货存入存放通道或从存放通 道取出件货的移送装置,所述移送装置附加于设置在其相对置的端部区域中的外移送机构 还包括内移送机构。 由EP 0 733 563 A1也已知一种带有用于将件货存入存放通道或从存放通道取出 件货的移送装置的件货接纳装置。所述移送装置在结构上基本上对应于EP 2 351 698 B1 的移送装置。 由EP 2 393 735 A1已知一种用于存入件货的移送装置,通过所述移送装置能操 作具有不同长度尺寸和宽度尺寸的件货。存放通道具有肋条底部,在所述肋条底部上突出 的肋条能将件货放置在不同的深度位置中。 WO 2014/023539 A1公开了一种用于从货架向提货轨道提供件货的方法,其中所 述件货通过每个货架通道的一个移送装置(存入及取出装置)存入货架或从货架取出。这里 在两个邻接的货架之间可以通过货架中的横向输送位从一个货架通道向一个相邻的货架 进行直接交换,这里移送装置使件货运动到横向输送位中。所述移送装置为此包括伸缩臂, 所述伸缩臂设有活动的带动件。 US 8,594,835 B2公开了一种自动的仓库系统,所述仓库系统具有货架,所述货架 具有分格设置的货架通道、对每个货架层分别有多个能沿导轨在第一方向(x方向)上运动 的件货接纳装置(穿梭机)。所述件货接纳装置分别设有一个能沿第二方向(z方向)向存放 通道中伸出的移送装置。所述件货接纳装置和移送装置由控制单元操控。存放通道可以容 纳具有不同尺寸的件货。
技术实现要素:
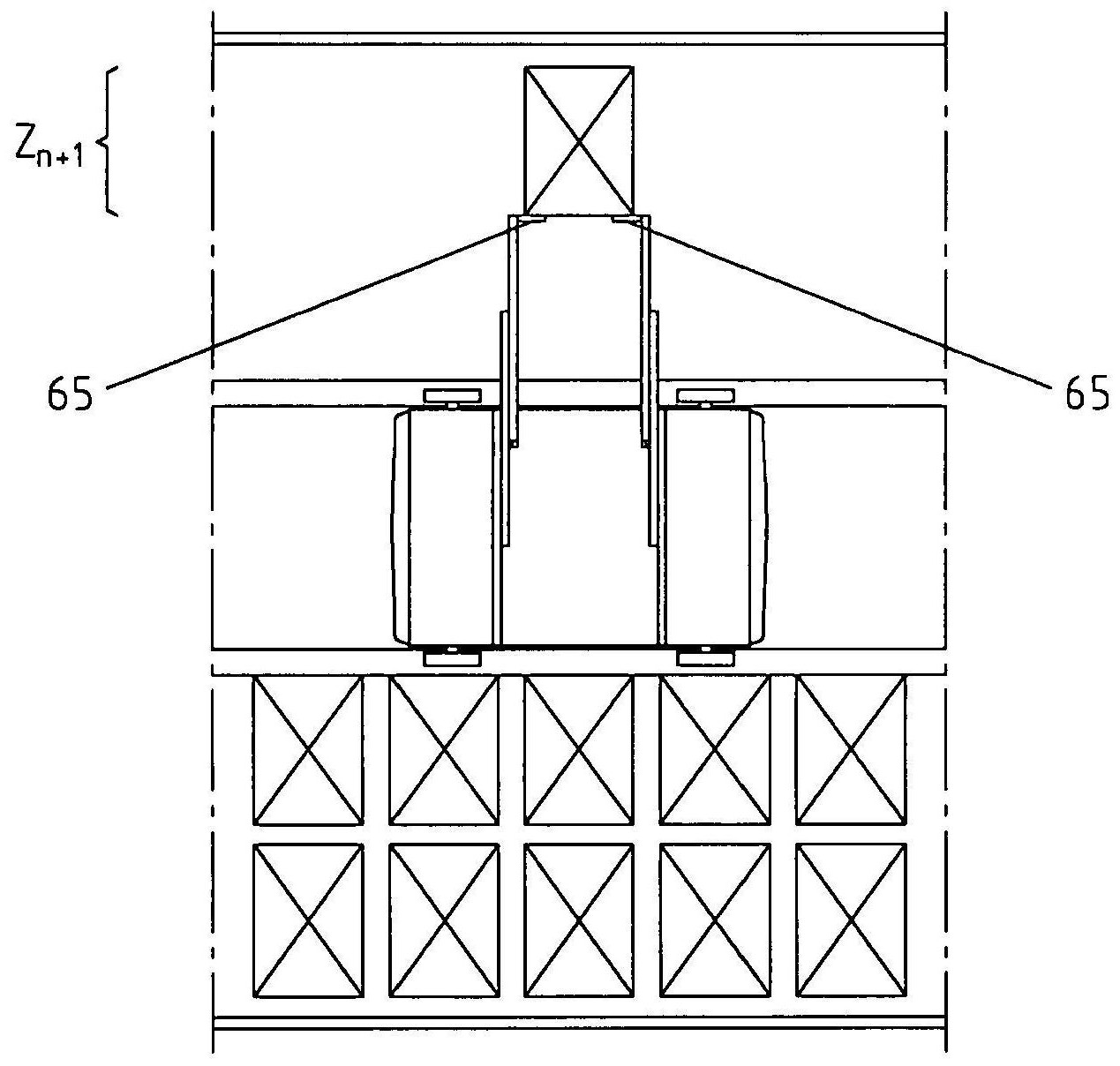
本发明的目的在于,提供一种用于存入件货的方法和一种仓库系统,其中,房间体 积与可供使用的存放体积的比值得到优化并且能实现高存放容量。 所述通过以下方法措施或特征来实现: 将件货(可能具有第一长度尺寸或者可能是至少一个具有第二长度尺寸的件货) 移交到件货接纳装置上, 将件货接纳装置定位在一个通过控制单元确定的存放通道的前面,在所述存放通 道中应至少在第一深度位置(Zn)存入一个件货,并且在第一深度位置后面的第二深度位置 (Zn 1)存入一个件货; 使一个件货从件货接纳装置预移位到存放通道中,使得该件货通过移送装置沿存 放通道的方向(第一调节方向)的运动由一个所述移送机构一直移位到中间位置(Zp), 使移送装置沿件货接纳装置的方向(第二调节方向)运动返回,使得应使所述件货 从中间位置(Zp)移位到第二深度位置(Zn 1)的另一个所述移送机构定位在该件货朝向件货 接纳装置的侧壁的后面, 通过移送装置沿存放通道的方向(第一调节方向)的运动由所述另一个移送机构 将存放通道中的件货从中间位置(Zp)再移位到第二深度位置(Zn 1)。 应存放到沿存放通道的深度方向后面/最后面的深度位置处的件货以依次进行的 移位运动由件货接纳装置一直移位到最终的深度位置或存放位置。首先将该件货运动或移 位到一个中间位置,此后才由这个中间位置运动或移位到第二深度位置(存放位置)。在件 9 CN 111605951 A 说 明 书 3/21 页 货接纳装置具有细长的结构形式时,这使得可以多层深度地存放(具有第一长度尺寸或第 二长度尺寸的)件货,另一方面,移送装置、特别是伸缩单元沿z方向最大能在存放通道的存 放深度的长度上调节,即使将一个件货存放在后面/最后面的深度位置时。移送装置不会突 出于货架后面的纵向侧边。因此,移送装置相对于件货接纳装置的最大伸出运动或伸出长 度小于存放通道的存放深度。此外,移送装置可以设计得特别简单,并且在最简单的情况 下,根据第一实施形式仅具有所述外移送机构和一个内移送机构,或者根据第二实施形式 仅具有外移送机构。但仍能够几乎不受限制地存入具有各种不同长度尺寸的件货。件货接 纳装置相对于由现有技术已知的件货接纳装置可以构造得较窄并且可供使用的房间体积 能够用于实现更多的存放体积。移送装置、特别是伸缩单元的返回运动由电子控制单元根 据要从中间位置移位到最终的(后面/最后面的)深度位置的件货的长度尺寸来计算并且小 于移送装置直到初始位置的(可能的)调节运动,在所述初始位置中,移送装置基本上定位 在件货接纳装置的中央。所述移送装置优选返回运动到仅略微地位于侧壁的后面,从而移 送机构能够运动到操作位置,而不会与件货发生碰撞。 也已经证明有利的是,执行以下方法措施: 将一个具有第一长度的第一件货(长件货)移交到件货接纳装置上; 将件货接纳装置定位在一个通过控制单元确定的存放通道的前面,在所述存放通 道中应至少在第一深度位置(Zn)存入一个具有第一长度的件货,并且在第一深度位置后面 的第二深度位置(Zn 1)也应存入一个具有第一长度的件货, 使所述件货从件货接纳装置预移位到存放通道中,使得该件货通过移送装置沿存 放通道的方向(第一调节方向)的运动由沿移位方向后面的外移送机构一直移位到中间位 置(Zp), 使移送装置沿件货接纳装置的方向(第二调节方向)运动返回,使得所述内移送机 构定位在该件货朝向件货接纳装置的侧壁的后面,通过移送装置沿存放通道的方向(第一 调节方向)的运动由所述内移送机构将存放通道中的件货从中间位置(Zp)再移位到第二深 度位置(Zn 1)。 应存放到沿存放通道的深度方向后面的深度位置处的件货以依次进行的移位运 动由件货接纳装置一直移位到最终的存放位置。首先该件货由移送装置引导进行在件货接 纳装置和存放通道之间的移位运动,由此可以限制件货的不希望的转动。具有“低等级”包 装质量的件货也可以被输送并足够精确地存放在后面的深度位置处,以便在以后能可靠地 执行取出过程。 也可以有利地实现以下方法措施: 将一个具有第一长度的第二件货移交到件货接纳装置上; 将件货接纳装置定位在所确定的存放通道的前面,在所述存放通道中一个具有第 一长度的第一件货已经存入第二深度位置(Zn 1)中, 通过移送装置沿存放通道的方向(第一调节方向)的运动由沿移位方向后面的外 移送机构使所述第二件货从件货接纳装置向存放通道中移位到第一深度位置(Zn)。 应存放在沿存放通道的深度方向位于前面的深度位置中的件货在唯一一次移位 运动中就从件货接纳装置移位到最终的存放位置。根据这些措施,应存放在沿存放通道的 深度方向前面的深度位置中的件货由移送装置引导进行在件货接纳装置和存放通道之间 10 CN 111605951 A 说 明 书 4/21 页 的移位运动,由此限制了件货不希望的转动。具有“低等级”包装质量的件货也可以被输送 并足够精确地存放在前面的深度位置处,以便在以后能可靠地执行取出过程。 下面的方法措施也已经证实是有利的: 将一个具有第二长度的第一件货(短件货)移交到件货接纳装置上; 将件货接纳装置定位在一个通过控制单元确定的存放通道的前面,在所述存放通 道中至少在第一深度位置(Zn)应存入一个具有第二长度的件货,并且在第一深度位置后面 的第二深度位置(Zn 1)也应存入一个具有第二长度的件货,在第二深度位置后面的第三深 度位置(Zn 2)也应存入一个具有第二长度的件货, 使所述件货从件货接纳装置预移位到存放通道中,使得该件货通过移送装置沿存 放通道的方向(第一调节方向)的运动由内移送机构一直移位到中间位置(Zp), 使移送装置沿件货接纳装置的方向(第二调节方向)运动返回,使得所述沿第二调 节方向后面的外移送机构定位在该件货朝向件货接纳装置的侧壁的后面, 通过移送装置沿存放通道的方向(第一调节方向)的运动由沿第一调节方向前面 的外移送机构将存放通道中的件货从中间位置(Zp)再移位到第三深度位置(Zn 2)。 应存放在沿存放通道的深度方向最后的深度位置处的所述(第三或第四等等)件 货以依次进行的移位运动由件货接纳装置一直移位到最终的存放位置。已经证明有利的 是,即使件货接纳装置能够容纳多于一个具有第二长度的件货,具有第二长度的各件货也 分别单个地由件货接纳装置向存放通道中移位,因为以这种方式分别位于放置在前后相继 的深度位置处的各件货之间的距离可以降至最低。 以下方法措施也是有利的: 将一个具有第二长度的第二件货(短件货)移交到件货接纳装置上; 将件货接纳装置定位在所确定的存放通道的前面,在所述存放通道中一个具有第 二长度的第一件货已经存入第三深度位置(Zn 2)中, 通过移送装置沿存放通道的方向(第一调节方向)的运动由沿件货移位方向后面 的外移送机构或中间的移送装置使所述第二件货从件货接纳装置向存放通道中移位到第 二深度位置(Zn 1);此后 将一个具有第二长度的第三件货移交到件货接纳装置上; 将件货接纳装置定位在所确定的存放通道的前面,在所述存放通道中一个具有第 二长度的第一件货已经存入第三深度位置(Zn 2)中并且一个具有第二长度的第二件货已经 存入第二深度位置(Zn 1)中; 通过移送装置沿存放通道的方向(第一调节方向)的运动由沿件货的移位方向后 面的外移送机构或中间的移送装置使所述第三件货从件货接纳装置向存放通道中移位到 第一深度位置(Zn) 如上所述,(第三或第四等等)件货以依次进行的移位运动由件货接纳装置一直移 位到最终的存放位置,与此相对,应沿存放通道的深度方向存放在位于其前面的深度位置 的件货分别以唯一一次移位运动就从件货接纳装置一直移位到最终的存放位置。 已经证实特别有利的措施是,所述件货接纳装置具有支承框架、支承在所述支承 框架上的移送装置和接纳平台,其中,接纳平台设置成用于移送单一的具有第一长度的件 货(长件货)或用于移送至少一个具有第二长度的件货(短件货),并且移送装置具有平行于 11 CN 111605951 A 说 明 书 5/21 页 接纳平台的纵向侧面设置的(能同步伸出)伸缩单元,所述伸缩单元分别具有底座、能相对 于底座调节的第一滑块和能相对于第一滑块调节的第二滑块,并且所述第二滑块分别在其 彼此相对置的端部区域中设有外移送机构和设置在所述外移送机构之间的内移送机构,并 且各移送机构能够在相对于件货缩回的初始位置和抓持件货的操作位置之间调节。 这种移送装置的突出之处在于其紧凑的结构并且使得能在件货接纳装置和存放 通道之间水平地移送件货。向存放通道中存入件货和从存放通道中取出件货可以高动态地 进行。也可以实现有保护地移送件货。 在本发明的一个有利的实施形式中,件货接纳装置由单层货架操作机构成。 根据本发明的一个实施形式,所述仓库系统包括: 第一货架,所述第一货架具有在相互叠置的货架层中并排设置的存放通道; 第二货架,所述第二货架具有在相互叠置的货架层中并排设置的存放通道; 货架通道,所述货架通道沿x方向在第一货架和第二货架之间延伸, 多个件货接纳装置,每个件货接纳装置都具有能相对于该件货接纳装置沿第二方 向伸出到存放通道中的移送装置,并且控制单元操控件货接纳装置和移送装置,以便将件 货相互隔开间距地向存放通道存入到前后相继的深度位置(Zn...Zn 2)处, 装载物操纵单元,所述装载物操纵单元具有至少一个件货升降装置以及缓冲装 置,件货升降装置具有能升高和降低的移送装置,用于存入和/或取出件货,所述缓冲装置 具有预备装置,用于临时缓存件货; 导轨,所述导轨在至少一些货架层中这样设置第一货架和第二货架之间,使得件 货接纳装置能够移动接近存放通道和预备装置,以便在存放通道和预备装置之间移送件 货, 连接在件货升降装置上的传送技术设备,用于将件货运送给件货升降装置或从件 货升降装置运走件货。 利用这种仓库系统能够实现特别高的存入和取出能力。移送装置在取出时可以无 需选择地操作多种品种的具有不同长度尺寸的件货或者操作具有相同长度尺寸的件货。 根据本发明的一个有利的实施形式可以设定,在件货从件货接纳装置移位到存放 通道中之前,件货在件货接纳装置上并沿横向于存放通道的纵向延伸的方向定向。由此确 保了,在件货接纳装置上以高位置精度提供件货,并且即使件货仅由外移送机构引导,也可 以在没有由件货接纳装置导致明显转动的情况下使件货运动到中间位置或最终的深度位 置或存放位置。定向过程可以通过移送装置完成,或者可以通过专门的对中条完成。也可以 设想,外移送机构分别与移送装置的彼此相对置的端部隔开设置,从而移送装置的长度大 于外移送机构之间的间距。由此,件货在移位运动期间不会仅由外移送机构引导,而且也由 移送装置引导。 也证明有利的是,在件货从件货接纳装置移位到存放通道中之前,件货在件货接 纳装置上并沿平行于存放通道的纵向延伸的方向定位。件货通过具有接纳平台的、马达驱 动的传送装置或所述移送装置在件货接纳装置上平行于在方向定位。 附图说明 为了更好的理解本发明,下面参考附图来详细说明本发明。 12 CN 111605951 A 说 明 书 6/21 页 其中,分别以明显简化的示意图: 图1用一个货架层的俯视图示出按第一实施例的仓库系统的一个局部,所述仓库 系统具有货架和件货操纵单元; 图2用根据图1中的线II的视图示出仓库系统; 图3用正视图示出根据图1的仓库系统,其中没有件货操纵单元; 图4用一个货架层的俯视图示出按第二实施例的仓库系统的一个局部,所述仓库 系统具有货架和件货操纵单元; 图5用一个货架层的俯视图示出按第三实施例的仓库系统的一个局部,所述仓库 系统具有货架和件货操纵单元; 图6用一个货架层的俯视图示出按第四实施例的仓库系统的一个局部,所述仓库 系统具有货架和件货操纵单元; 图7用透视图示出件货接纳装置,所述件货接纳装置具有第一实施形式的用于向 货架中存入件货和从货架中取出件货的移送装置; 图8用正视图示出根据图7的件货接纳装置和货架的局部放大图; 图9a至9h示出利用根据图7的移送装置对具有第一长度尺寸的件货进行的存入过 程的步骤图; 图10a至10b示出具有第一长度尺寸的件货的取出过程的步骤图; 图11a至11i示出具有第二长度尺寸的件货的取出过程的步骤图; 图12用透视图示出件货接纳装置,所述件货接纳装置具有第二实施形式的用于向 货架中存入件货和从货架中取出件货的移送装置; 图13a至13h示出利用根据图12的移送装置对例如具有第一长度尺寸的件货进行 的存入过程的步骤图。











