
技术摘要:
本公开提供一种自动驾驶穿梭车的运行方法,该方法包括:自动驾驶穿梭车接收关于自动驾驶穿梭车的运行的信息;通过利用设置在自动驾驶穿梭车中的至少一个摄像头来识别引导线;以及自动驾驶穿梭车通过利用关于运行的信息和识别出的引导线来行驶。
背景技术:
随着技术的进步,对车辆的自动驾驶的兴趣增加。特别地,在如何通过车辆的自动 驾驶增加用户便利性并提供有效服务方面已经取得了许多技术进步。但是,为了实现车辆 的自动驾驶,需要将许多先进的技术应用于车辆,并且自动驾驶车辆的实现成本很高。因 此,车辆的成本增加,因而可能不使用车辆。考虑到这种情况,可以应用在下面描述的以低 成本实现的自动驾驶穿梭车。 前述内容仅旨在帮助理解本公开的背景。该背景并非旨在表示本公开落入本领域 技术人员已知的现有技术的范围内。
技术实现要素:
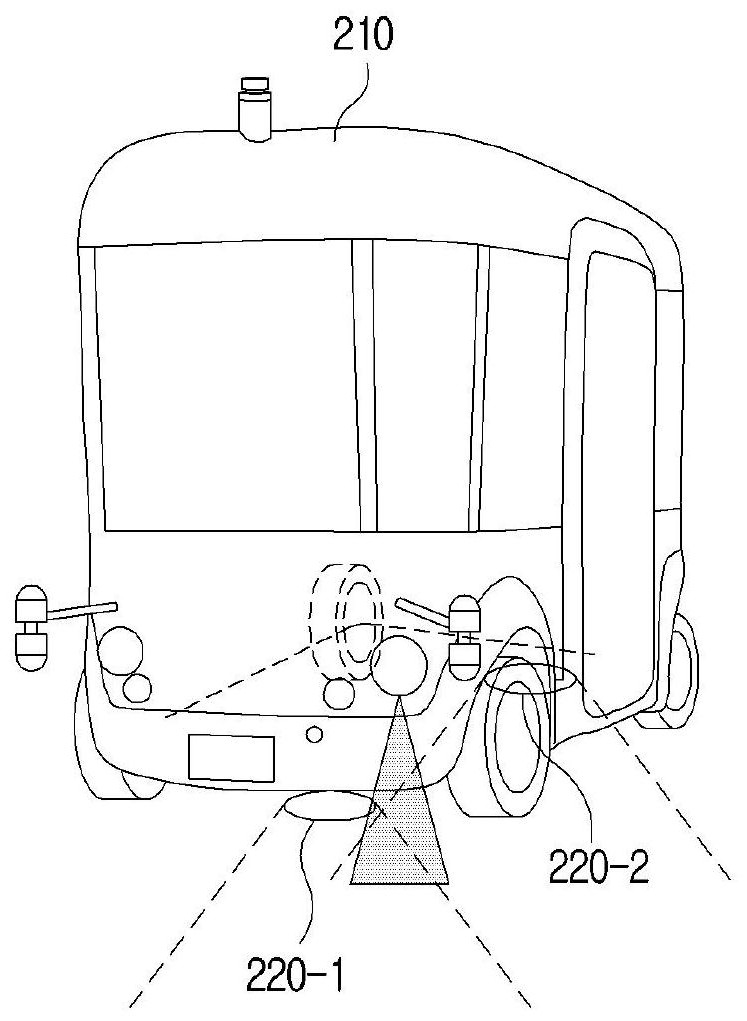
技术问题 本公开可以提供低成本自动驾驶穿梭车及该低成本自动驾驶穿梭车的运行方法。 本公开可以提供一种沿引导线行驶的低成本自动驾驶穿梭车及该低成本自动驾 驶穿梭车的运行方法。 本公开可以提供一种自动驾驶穿梭车及自动驾驶穿梭车识别引导线并运行的方 法。 本公开可以提供一种自动驾驶穿梭车及减少自动驾驶穿梭车的行驶错误的方法。 技术方案 根据本公开的实施例,一种自动驾驶穿梭车的运行方法包括:自动驾驶穿梭车接 收关于自动驾驶穿梭车的运行的信息;通过利用设置在自动驾驶穿梭车中的至少一个摄像 头来识别引导线;以及自动驾驶穿梭车通过利用关于运行的信息和识别出的引导线来行 驶。 自动驾驶穿梭车可以包括拍摄行驶路径的至少一个摄像头。自动驾驶穿梭车可以 通过拍摄行驶路径的至少一个摄像头识别引导线。 自动驾驶穿梭车可以包括拍摄行驶路径的两个或更多个摄像头。自动驾驶穿梭车 可以通过两个或更多个摄像头获取引导线的深度(depth)影像并利用获取的深度影像识别 引导线。 4 CN 111591645 A 说 明 书 2/12 页 自动驾驶穿梭车可以进一步包括拍摄前视影像、后视影像和侧视影像中的至少一 个的摄像头。自动驾驶穿梭车可以通过拍摄前视影像、后视影像和侧视影像中的至少一个 的摄像头获取影像。自动驾驶穿梭车可以考虑获取的影像行驶。 自动驾驶穿梭车可以将利用至少一个摄像头获取的信息传送到服务器。服务器可 以利用机器学习或学习方案存储和更新获取的信息。 当自动驾驶穿梭车在行驶期间未能识别引导线时,自动驾驶穿梭车可以向服务器 传送用于请求路径识别的消息。服务器也可以利用通过机器学习或学习方案存储和更新的 信息向自动驾驶穿梭车传送路径识别消息。自动驾驶穿梭车也可以利用从服务器接收的信 息沿引导线行驶。 关于运行的信息可以包括起点位置信息、终点位置信息、路径信息、运行时间信息 和速度信息中的至少一个。 当自动驾驶穿梭车沿引导线行驶时,自动驾驶穿梭车可以利用至少一个摄像头获 取障碍物的影像。 当自动驾驶穿梭车可以识别出障碍物,并且当障碍物在引导线上位于预设距离内 时,自动驾驶穿梭车的运行可以停止。 当障碍物是车辆时,自动驾驶穿梭车可以识别车辆是否是列表上的穿梭车。 当车辆是列表上的穿梭车时,自动驾驶穿梭车可以通过利用车辆的优先级确定是 否停止行驶。 自动驾驶穿梭车可以从路侧单元(RSU)接收关于运行的信息,并可以利用接收的 关于运行的信息沿引导线行驶。 根据本公开的实施例,一种自动驾驶穿梭车包括:摄像头单元,获取影像;以及处 理器,控制摄像头单元。处理器识别关于自动驾驶穿梭车的运行的信息,并利用包括在摄像 头单元中的至少一个摄像头来识别引导线。自动驾驶穿梭车利用关于运行的信息和识别出 的引导线来行驶。 自动驾驶穿梭车可以进一步包括:收发器,传送和接收信号。关于自动驾驶穿梭车 的运行的信息可以通过收发器接收。 根据本公开的实施例,一种自动驾驶穿梭车的运行系统包括:自动驾驶穿梭车;以 及服务器。自动驾驶穿梭车从服务器接收关于自动驾驶穿梭车的运行的信息。自动驾驶穿 梭车利用包括在自动驾驶穿梭车中的至少一个摄像头来识别引导线。自动驾驶穿梭车利用 关于运行的信息和识别出的引导线来行驶。 有益效果 根据本公开,可以运行低成本自动驾驶穿梭车。 根据本发明,低成本自动驾驶穿梭车可以沿引导线运行。 根据本公开,可以提供一种自动驾驶穿梭车及自动驾驶穿梭车识别引导线并运行 的方法。 根据本公开,可以减少自动驾驶穿梭车的行驶错误。 将理解的是,本公开要解决的技术问题不限于上述技术问题。对于本公开所属领 域的技术人员而言,根据以下描述,本文未提及的其它技术问题应是显而易见的。 5 CN 111591645 A 说 明 书 3/12 页 附图说明 从下面结合附图的详细描述中,将更清楚地理解本公开的上述和其它目的、特征 及其它优点,其中: 图1是示出车辆与设备进行通信的方法的示图; 图2A和图2B是示出自动驾驶穿梭车的示图; 图3是示出获取自动驾驶穿梭车的行驶路径信息的方法的示图; 图4是示出自动驾驶穿梭车沿引导线行驶的方法的示图; 图5是示出自动驾驶穿梭车基于服务器沿引导线行驶的方法的示图; 图6是示出自动驾驶穿梭车与路侧单元(RSU)通信的方法的示图;以及 图7是示出自动驾驶穿梭车的框图。











