
技术摘要:
本发明公开了一种多自由度高性能混联机器人,包括有静平台、转动件、第一外圈、第二外圈、四条主动伸缩腿、动平台、以及连接在动平台末端的两自由度转头;所述第一主动伸缩腿和第三主动伸缩腿均贯穿于转动件;并分别通过转动副与转动件相连,所述转动件通过转动副与静 全部
背景技术:
混联机器人机构由于可同时兼顾机床和关节机器人的特点,具有刚度大、承载能 力强、误差累积小、动态性能好等优点,近年来被广泛应用于众多技术领域。 专利GB2173472所公开的一类带定位头的空间混联机器人,包括三个可沿轴向伸 长或缩短的主动调节装置,此类机器人由于与连接定位头的主动长度调节装置的铰链为三 自由度铰链,且各长度调节装置分别通过一个二自由度铰链与机架连接,导致机构铰链数 目和构件数目居多,结构复杂。专利CN102699899A所公开的一种过约束高刚度多坐标混联 机器人,同样包括三个可沿轴向伸长或缩短的主动调节装置和一条从动调节装置;该机器 人减少了机构中铰链自由度数目,但为过约束机构,对零部件的制造和安装有很严格的要 求。此外,各长度调节装置分别通过一个二自由度铰链与机架连接,使得结构复杂、运动构 件数量较多,而且机架制造工艺比较复杂。专利CN1212221C公开了一种四自由度混联机器 人,由具有两自由度的并联机构和与之串联的二自由度转头组成。然而此机器人的并联部 分仅能实现平面运动,需要串接在平动或转动自由度的机构上才能实现空间运动。
技术实现要素:
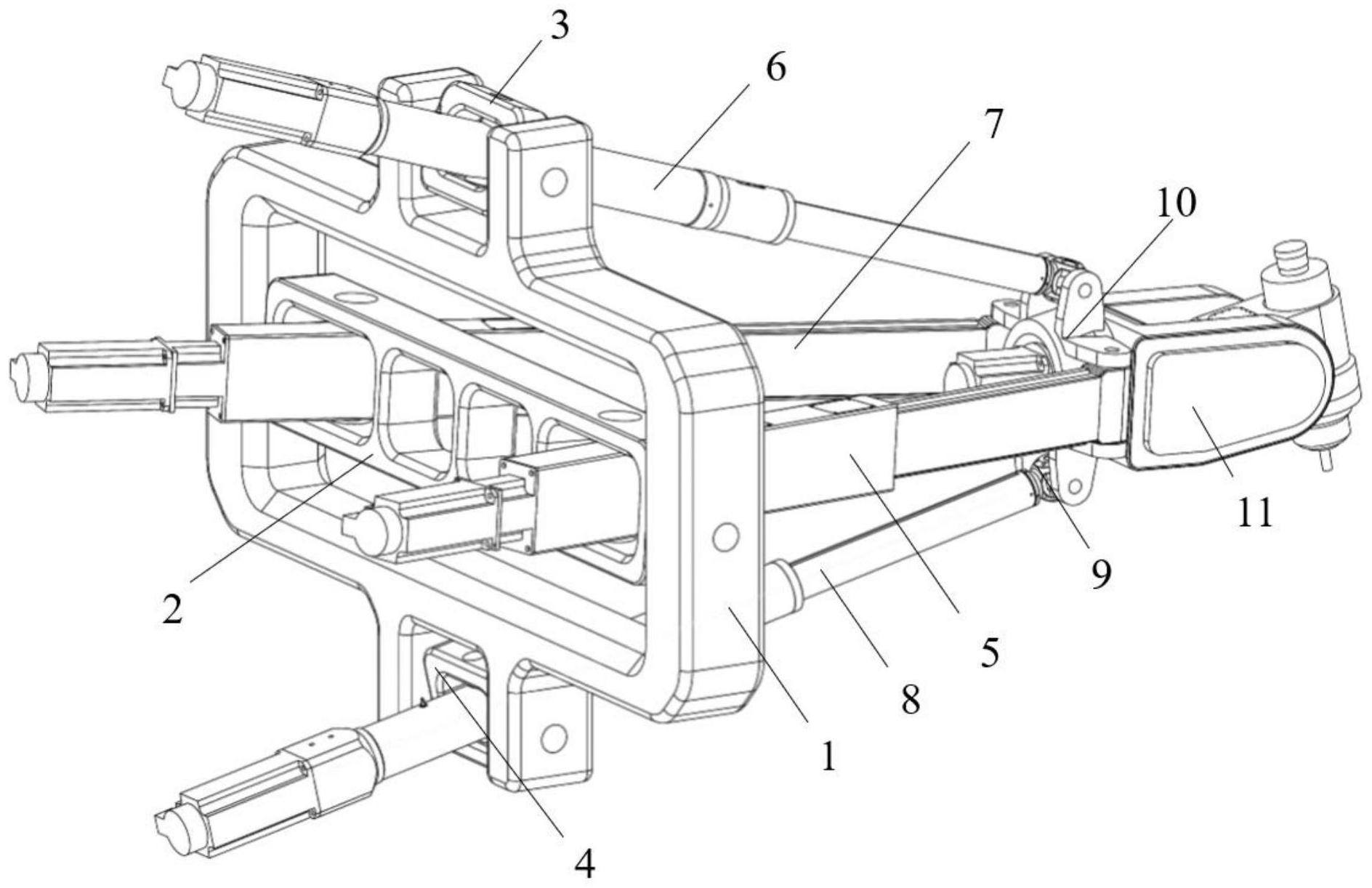
本发明的目的在于提供一种可实现多自由度数目的混联机器人,以减少构件数 目、降低制造成本,便于实现模块化的多自由度混联机器人。 实现本发明目的的技术解决方案为: 一种多自由度高性能混联机器人,包括有静平台、转动件、第一外圈、第二外圈、四 条主动伸缩腿、动平台、以及连接在动平台末端的两自由度转头; 所述第一主动伸缩腿和第三主动伸缩腿均贯穿于转动件;并分别通过转动副与转 动件相连,所述转动件通过转动副与静平台相连,所述第一主动伸缩腿和第三主动伸缩腿 末端均通过转动副与动平台相连; 所述第二伸缩腿与第四伸缩腿对称分布在转动件的两侧;所述第二主动伸缩腿、 所述第四主动伸缩腿分别贯穿于第一外圈和第二外圈,且分别通过转动副与对应外圈相 连;所述第一外圈和第二外圈均与静平台转动连接;所述第二伸缩腿与第四伸缩腿末端均 通过球副与动平台相连; 所述第一主动伸缩腿和转动件的转动轴线、第三主动伸缩腿和转动件的转动轴 线、第一主动伸缩腿和动平台的转动轴线、以及第三主动伸缩腿和动平台的转动轴线,共四 条轴线相互平行;所述第一主动伸缩腿和转动件的转动轴线、第三主动伸缩腿和转动件的 转动轴线,均与转动件和静平台的转动轴线垂直相交; 所述第二主动伸缩腿和第一外圈的转动轴线,与第一外圈和静平台的转动轴线垂 直相交;所述第四主动伸缩腿和第二外圈的转动轴线,与第二外圈和静平台的转动轴线垂 4 CN 111604883 A 说 明 书 2/4 页 直相交。 本发明与现有技术相比,其显著优点是: (1)本发明第一支链与第三支链结构相同,且共用一个转轴,仅需通过转动副与转 轴和静平台连接,可有效减少铰链数量。 (2)第一支链和第三支链采用矩形结构,且长边为连接所述主动伸缩腿与动平台 所在转动轴线的方向,有利于支链约束刚度,进而提升整机的刚度; (3)通过增加制动器约束可实现机器人自由度数目的改变,使机器人具有不同的 操作模式,且在增加约束的同时,也增加了机器人的刚度和精度。 (4)本发明的多自由度高性能混联机器人只包含静平台、连接件、支链、动平台和 转头五个模块,通过改变某个模块,可使机器人具有不同的功能和造型,即可实现模块化设 计和制造。 附图说明 图1为实施例1中混联机器人总体结构示意图。 图2为实施例1中第一、第三主动伸缩腿的结构示意图。 图3为实施例1中第二、第四主动伸缩腿的结构示意图。 图4为实施例1中机器人与机架连接示意图。 图5为实施例2中混联机器人总体结构示意图。 图6为实施例2中机器人与机架连接示意图。 图7为实施例3中机器人与机架连接示意图。 图8为实施例4中机器人与机架连接示意图。 图9为实施例5中机器人与机架连接示意图。 图10为实施例6中机器人总体结构示意图。 图11为实施例6中机器人与机架连接示意图。 图12为实施例7中机器人总体结构示意图。 图13为实施例7中机器人与机架连接示意图。











