
技术摘要:
本发明公开了一种CVT双压力液压系统的压力控制方法,该控制方法根据不同情况降低主油路压力,从而降低液压能耗损失,TCU控制器根据钢带扭矩传递大小,计算出主动带轮液压缸目标压力和被动带轮液压缸目标压力,当被动缸目标压力大于等于主动缸目标压力一定值时,则主油 全部
背景技术:
CVT液压系统根据主被动缸压力的依赖关系可分为双压力系统(即双压力液压回 路系统)和单压力系统(即单压力液压回路系统),对于单压力系统,被动缸压力等于主油路 压力,主动缸压力通过比例减压阀减压至主动缸,因此,任何时候被动缸压力都大于主动缸 压力,而有些工况下,主动缸压力需大于被动缸压力,故需设置主动缸面积大于被动缸面 积;对于双压力系统来说,其主油路压力、主动带轮和被动带轮的压力都可单独控制,主被 缸压力分别通过各自的减压阀来调节,主被缸的压力控制是分别独立的,且对于双压力液 压系统,经过专业的分析发现,主油路压力往往都会大于被动缸压力和主动缸压力,存在着 Pline=Max(Psec,Ppri) ΔP的情况,此时,主油路压力始终比被动缸和主动缸俩最大的值还 要大ΔP(该偏差值以bar为单位,如5bar),然而主油路压力高,意味着在进行压力控制时存 在着能耗大的问题。 基于此,为了最大挖掘自动变速器节能潜能,并在不增加更多硬件成本的情况下 降低主油路的压力,亟需设计一种针对CVT双压力液压系统的压力控制方法,以提高变速器 的整体效率。
技术实现要素:
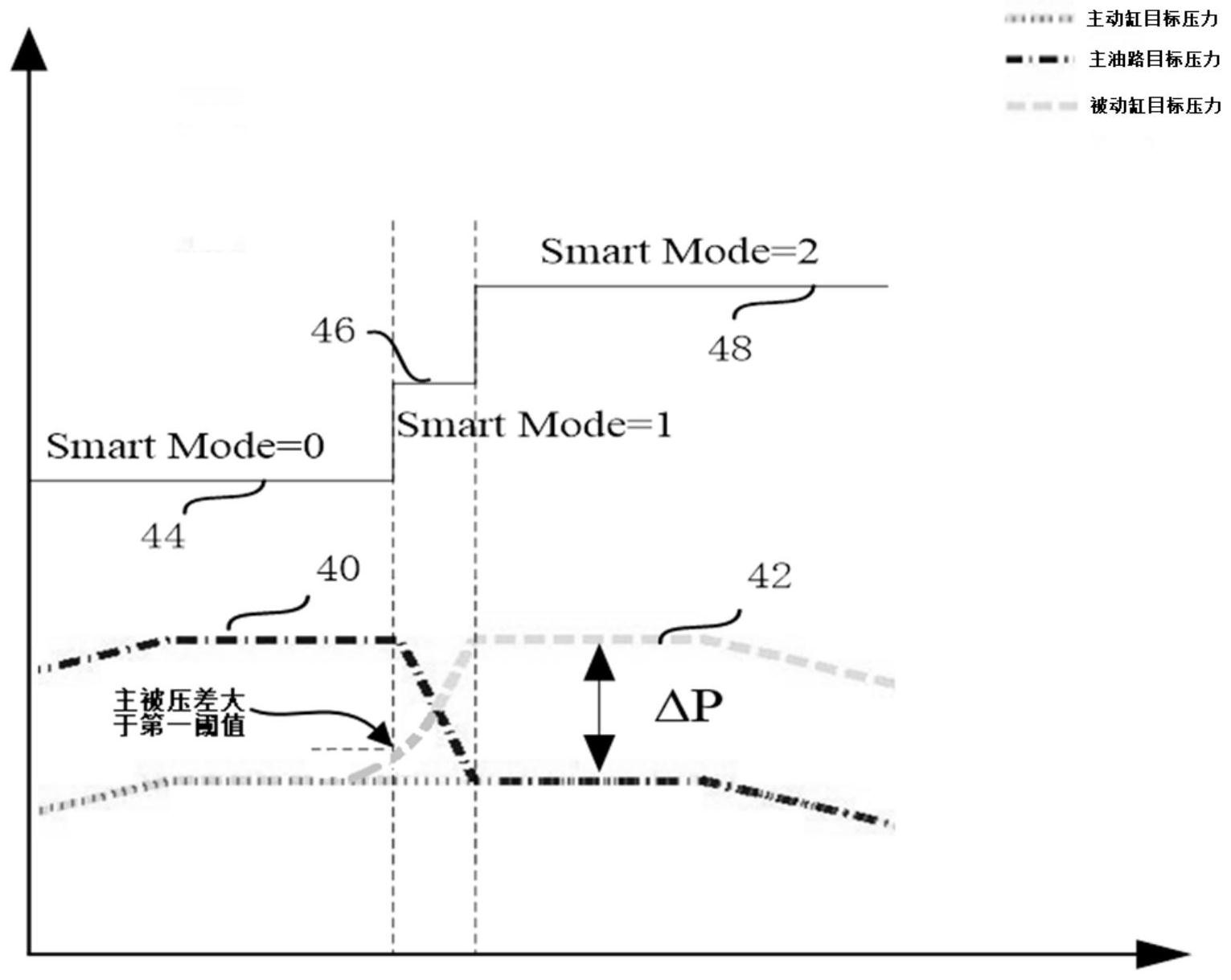
(一)要解决的技术问题 基于此,本发明公开了一种CVT双压力液压系统的压力控制方法,该控制方法通过 实时计算被动缸和主动缸目标压力,自动判断压力控制是否需要进入Smart Mode的激活状 态或者退出状态,从而采取措施降低液压系统主油路压力,提高CVT自动变速器整体控制效 率,并降低汽车燃油消耗。 (二)技术方案 本发明公开了一种CVT双压力液压系统的压力控制方法,所述CVT双压力液压系统 中的被动带轮处设有压力传感器,且主动带轮处不设有压力传感器,该压力控制方法包括 Smart Mode控制策略,Smart Mode控制策略中包含以下4个状态:状态0表示Smart Mode未 激活;状态1表示Smart Mode激活过程中;状态2表示Smart Mode已激活;状态3表示Smart Mode退出过程中,具体的: 1)Smart Mode=0未激活时,被动缸压力控制阀基于被动带轮处的压力传感器和 设定的被动缸目标压力值进行闭环控制,主油路压力控制阀基于主油路目标压力值进行开 环控制; 2)当被动缸目标压力和主动缸目标压力都大于6bar以上,且被动缸目标压力减主 动缸目标压力的差值大于等于第一阈值时,则从Smart Mode=0切换到Smart Mode=2的状 4 CN 111577888 A 说 明 书 2/7 页 态,并进入Smart Mode=1激活过程中,从而在标定的过渡时间内完全切换到Smart Mode= 2的激活状态; 3)Smart Mode=2激活状态时,被动缸压力控制阀全开,被动带轮压力控制被完全 旁通,而主油路压力控制阀切换到反馈值基于被动压力传感器信号和设定值基于被动缸目 标压力值的闭环控制状态; 4)当被动缸目标压力减主动缸目标压力的值小于第二阈值时,则从Smart Mode= 2切换到Smart Mode=1的状态,并进入Smart Mode=3退出过程中,从而在标定的过渡时间 内完全返回到Smart Mode=0的未激活状态,其中,所述第一阈值大于所述第二阈值。 进一步的,所述Smart Mode=0和Smart Mode=2中的闭环控制方式为PID闭环控 制或自适应闭环控制,且主油路压力控制阀和被动缸压力控制阀都为电磁阀。 进一步的,Smart Mode=1和Smart Mode=3的过渡时间标定为200~500ms,若超 过该过渡时间未完成Smart Mode=0与Smart Mode=2之间的完全切换,则进行报警提示并 退出Smart Mode模式。 进一步的,在Smart Mode=1激活过程中,主油路目标压力逐步降低ΔP,直至降到 被动缸目标压力的水平,所述ΔP满足:Pline=Max(Psec,Ppri) ΔP,其中Psec表示被动缸目标 压力,Ppri表示主动缸目标压力,Pline表示主油路目标压力,Max为取最大值函数。 此外,本发明还公开了一种CVT双压力液压系统的压力控制方法,所述CVT双压力 液压系统中的被动带轮处和主动带轮处都设有压力传感器,该压力控制方法包括Smart Mode控制策略,Smart Mode控制策略中包含以下4个状态:状态0表示Smart Mode未激活;状 态1表示Smart Mode激活过程中;状态2表示Smart Mode已激活;状态3表示Smart Mode退出 过程中,具体的: 1)Smart Mode=0未激活时,被动缸压力控制阀和主动缸压力控制阀都进行闭环 控制,主油路压力控制阀开环控制;且选择主动缸目标压力和被动缸目标压力两者中的最 大值所对应的压力控制阀作为被控控制阀,指定被控控制阀对应的目标压力作为被控目标 压力; 2)当被动缸目标压力和主动缸目标压力都大于6bar以上,且两者的压差的绝对值 大于等于第一阈值,则从Smart Mode=0切换到Smart Mode=2的状态,并进入Smart Mode =1激活过程中,从而在标定的过渡时间内完全切换到Smart Mode=2的激活状态; 3)Smart Mode=2激活状态时,被控控制阀全开,被控控制阀控制的被控带轮压力 控制被完全旁通,而主油路压力控制阀切换到反馈值基于被控控制阀的压力传感器信号和 设定值基于被控目标压力值的闭环控制状态; 4)当被动缸目标压力与主动缸目标压力之间的压差的绝对值小于第二阈值时,则 从Smart Mode=2切换到Smart Mode=1的状态,并进入Smart Mode=3退出过程中,从而在 标定的过渡时间内完全返回到Smart Mode=0的未激活状态,其中,所述第一阈值大于所述 第二阈值。 进一步的,所述Smart Mode=0和Smart Mode=2中的闭环控制方式为PID闭环控 制或自适应闭环控制,且主油路压力控制阀、被动缸压力控制阀和主动缸压力控制阀都为 电磁阀。 进一步的,Smart Mode=1和Smart Mode=3的过渡时间标定为200~500ms,若超 5 CN 111577888 A 说 明 书 3/7 页 过该过渡时间未完成Smart Mode=0与Smart Mode=2之间的完全切换,则进行报警提示并 退出Smart Mode模式。 进一步的,在Smart Mode=1激活过程中,主油路目标压力逐步降低ΔP,直至降到 被控目标压力的水平,所述ΔP满足:Pline=Max(Psec,Ppri) ΔP,其中Psec表示被动缸目标压 力,Ppri表示主动缸目标压力,Pline表示主油路目标压力,Max为取最大值函数。 在另外一方面,本发明还公开了一种变速器控制器,包括: 至少一个处理器;以及与所述处理器通信连接的至少一个存储器,其中: 所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指 令能够执行如上述任一项所述的CVT双压力液压系统的压力控制方法。 在另外一方面,本发明还公开了一种非暂态计算机可读存储介质,所述非暂态计 算机可读存储介质存储计算机指令,所述计算机指令使所述计算机执行如上述任一项所述 的CVT双压力液压系统的压力控制方法。 (三)有益效果 相对于现有技术,本发明具备如下的有益效果: (1)本发明的压力控制方法可通过软件进行自动控制和判断,无需增加新的硬件 成本,将主油路压力降低ΔP,从而在进行压力控制时整体降低液压系统主回路的损耗,提 高了变速器运行效率。 (2)通过该控制策略,能很好地处理能耗大时的压力过渡阶段(此处的压力过渡阶 段指的是:被动缸目标压力和主动缸目标压力都大于6bar以上,且主动缸目标压力与被动 缸目标压力之间压力差的绝对值大于第一阈值时)的情况,并实现液压系统主回路和主被 动缸压力稳定地切换。 (3)本发明的压力控制方法完整的记载了Smartmode=0和Smartmode=2的激活和 退出条件以及主油路和被动缸压力控制的手段,使得该降压控制方法能够自动内嵌到夹紧 力控制或者速比控制的压力控制过程中,此外,本发明的控制方法在主动带轮处有压力传 感器时,可针对主动压力控制阀进行控制(需主动缸目标压力大于被动缸目标压力),并采 用相同的处理方法进行主油路降压。 附图说明 通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理 解为对本发明进行任何限制,在附图中: 图1为本发明实施例中的一种CVT双压力液压系统的原理框图。 图2为本发明实施例一中的一种CVT双压力液压系统的压力控制方法。











