
技术摘要:
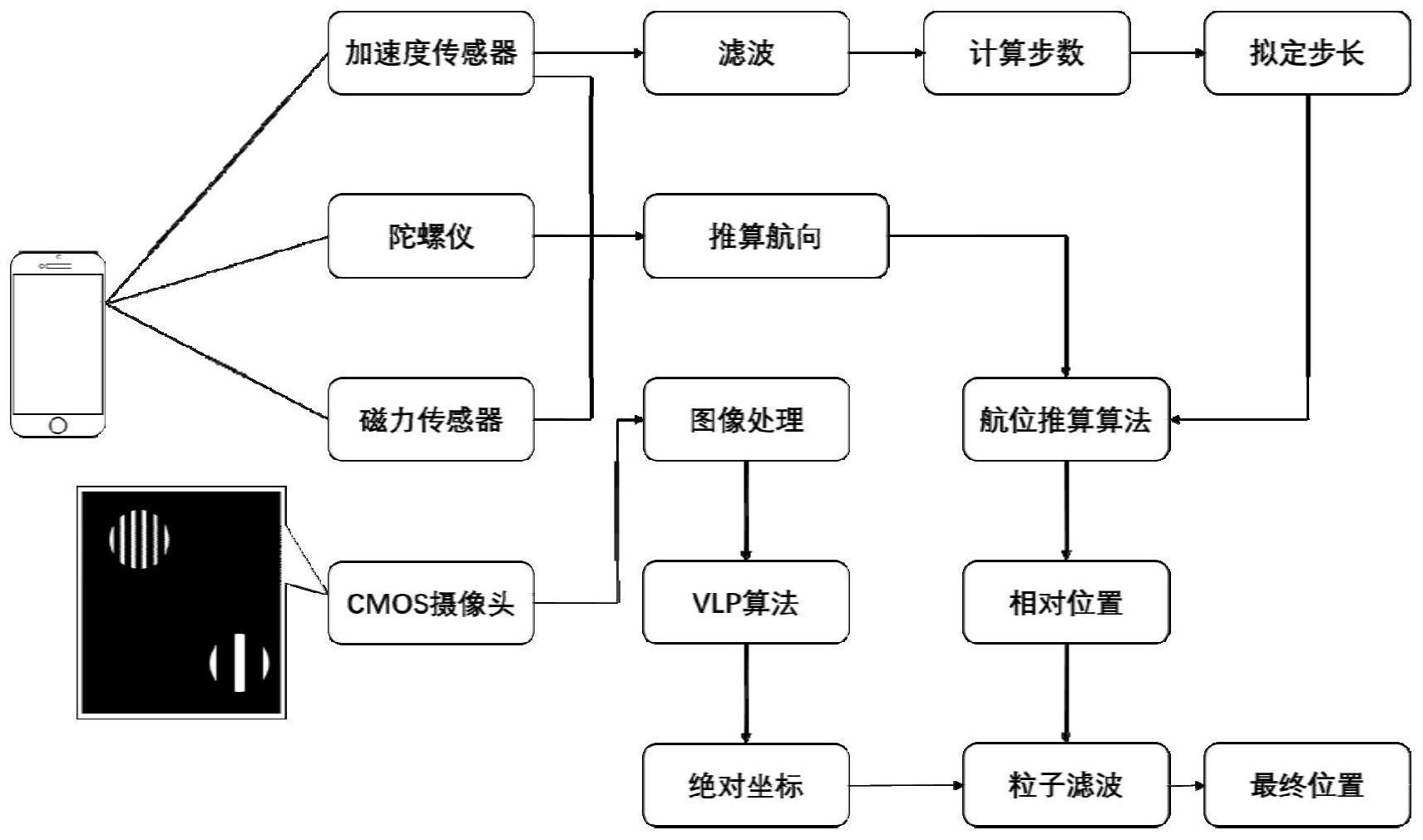
本发明公开一种基于智能手机航位推算以及LiFi识别的室内定位方法,该方法依托于目前市面上所销售的智能手机,使用智能手机中普遍存在的加速度传感器、陀螺仪、磁力传感器以及CMOS摄像头作为传感器来进行行人航迹推算,主要应用在室内使用LED灯具进行照明的场合,将室内 全部
背景技术:
目前,室内定位在人们的日常生活、工作当中具有十分广大的应用前景。室内定位 技术可解决的问题包括但不限于:在大型商场,由于商场结构复杂、人流较大,有时容易迷 失方向,而室内定位技术能够准确定位到当前所在的位置,从而更方便地去寻找目的地;在 大型地下停车场中,由于停车场的位置特征不明确、面积较大且场景重复度高,导致了平时 在找车的过程中浪费了大量的时间,而通过室内定位技术,我们可以方便地获取当前相对 于停车场地图的所在位置以及停车的位置,能够快速地找到具体的停车点,方便出行。可以 说目前人们对于更为稳定可靠、精度更高的室内定位技术的需求十分大,这促使了本发明 的产生。而现存的室内定位技术包括全球定位系统(Global Positioning System,GPS)、 Wi-Fi室内定位技术、射频识别技术、蓝牙定位技术、基站定位技术,UWB(Ultra Wideband) 室内定位技术、室内可见光定位技术、智能手机的行人航位推算技术等。上述的室内定位技 术均有一定的技术缺陷: (1)GPS定位技术与基站定位技术受到在室内时信号穿过墙体后大大减弱的影响, 会造成定位结果的精度不足、系统鲁棒性能差,所以并不适合作为室内定位技术; (2)Wi-Fi室内定位技术以及蓝牙定位技术这两种定位技术较类似,通过事先记录 巨量的定位点与所在位置的信号强弱,然后与移动设备接受的信号强弱进行对比得到当前 所在位置。或者将接入移动设备的三个信号进行差分算法,然后进行三角定位。然而信号强 弱大小受到的干扰源较多,且要做到对大面积室内进行信号覆盖的成本较高,所以并不适 合建立在大型的应用场景且人流较大的场景; (3)射频识别技术通过读取目标的RFID电子标签的特征信息,通过采用近邻法、多 边定位法和接受信号强度等方法来获取所在位置信息。然而RFID电子标签的制造成本较 高,且会面临RFID电子标签被恶意篡改的问题,所以并不适合建立在大型的应用场景且人 流较大的场景; (4)UWB室内定位技术利用事先布置好的已知位置的锚节点和桥节点,与新加入的 盲节点进行通讯,并利用三角定位方法来进行定位。其中UWB室内定位利用到的超宽带通信 不需要使用传统通信体制中的载波,而是通过发送和接收具有纳秒级别以下的极窄脉冲来 传输信号,穿透力强,安全性能高,抗干扰能力强,定位精度高。但是其实施成本十分高; (5)室内可见光通信定位技术扩展了用于室内照明的LED灯具的运用,利用特殊的 调制方法使LED灯发出高频的、肉眼无法识别的灯光,在终端使用图像或光电二极管(PD)对 光进行接收处理,从而进行定位。室内可见光通信定位的缺陷为,由于视距传播(line of sight)的原因,当光线被障碍物阻挡时,可见光通信定位会出现失准甚至失败的问题,稳定 性能不够; 5 CN 111551181 A 说 明 书 2/8 页 (6)智能手机航位推算的方法使用了手机所携带的速度传感器、陀螺仪以及磁力 传感器来计算行人的步数以及航向,以此推算得到行人的位置信息。该技术的缺陷在于传 感器的漂移误差,而且当误差不能得到及时的补偿时会随着时间的进行而累积,最后得到 的结果会与现实结果有极大的偏差,定位准确性很低。
技术实现要素:
本发明的目的是克服现有技术的不足,提供一种基于智能手机航位推算以及LiFi 识别的室内定位方法,将室内可见光定位与智能手机行人航位推算这两种室内定位技术互 补地融合在一起,可见光定位能够及时地矫正手机行人航位推算过程中由于传感器发生飘 逸误差而导致的定位失准问题,而手机航位推算又能在室内光照条件较差的地方、或者光 线被阻挡时继续进行对行人的定位,两者相融合后室内定位系统的鲁棒性以及精确度得到 了极大的提高,同时应用的场景也得到了较大的扩展。 本发明的技术方案如下:提供一种基于智能手机航位推算以及LiFi识别的室内定 位方法,包括以下步骤: 步骤1:通过手机端接收室内LED灯的信息,进行室内VLP(Visible Light Positioning)定位,获得行人的绝对位置坐标; 步骤2:通过手机端采样加速度传感器、陀螺仪和磁力传感器的信息,计算得到行 人相对起始位置的航位信息; 步骤3:将所述步骤1与所述步骤2计算得到的位置信息引入到粒子滤波器中,得到 误差较小的行人位置。 进一步地,所述步骤1包括以下步骤: 步骤1.1:在LED灯的发射端,利用PWM调制方式,控制输入PWM的频率、相位差,得到 ID互不相同的LED灯,ID的具体形式是黑白条纹相间,其特征包括条纹的粗细和条纹的数 目,不同LED灯ID展示出来的特征不同; 步骤1.2:在手机接收端,利用手机的CMOS摄像头拍摄LED灯得到图片; 步骤1.3:通过图像处理技术处理拍摄到的LED图片,解码得到LED灯的面积、白色 条纹数、黑白条纹占空比特征,以及LED灯在拍摄图片中的几何位置信息; 步骤1.4:根据获取到的所拍摄LED灯的特征信息,与预先建立的本地数据库中的 LED的ID进行匹配,得到所拍摄LED灯的具体位置坐标; 步骤1.5:根据获得到的LED灯具位置信息以及灯具在照片中的几何位置信息,引 入VLP定位算法计算出手机所在的位置坐标,即行人的绝对位置坐标。 进一步地,所述步骤2包括以下步骤: 步骤2.1:在手机端,使用手机端上的三轴加速度传感器获取手机加速度信息,并 对比三组加速度得到活跃轴,在活跃轴上寻找满足加速度超过阈值 当前峰值与前 一个和后一个峰值相差值大于阈值 前面斜率为正后面斜率为负的时间点,此时间点 即为由一个步数产生的峰值时间,通过计算峰值时间得到步数; 步骤2.2:在手机端,整合加速度传感器、陀螺仪和磁力传感器的信息,计算得到行 人的航向; 6 CN 111551181 A 说 明 书 3/8 页 步骤2.3:基于磁场变化以及磁力传感器与陀螺仪的相关性,估计得到准确的航 向; 步骤2.4:将所述步骤2.1中计算得到的步数以及所述步骤2.3中得到的航向引入 到航位推算算法中,得到行人当前的位置。 进一步地,所述步骤3中使用的粒子滤波算法如下: 步骤3.1:根据所述步骤1获得的基于可见光通信的初始化室内定位坐标,在室内 地图中建立行人所在位置的建议分布,建议分布为以VLP定位坐标为期望值的二维正态分 布,并以该建议分布生成N个描述位置信息和权重信息的粒子来拟合分布; 步骤3.2:根据所述步骤2得到的行人航位信息,添加一定的白噪声并以此指示N个 粒子的下一步行为,以此表示行人下一步位置的置信度分布: 其中, 为t时刻第k个粒子的位置坐标, 为上一时刻的粒子坐标,dt为采 样周期内行人行走距离,θ为测得的航向, 为白噪声; 步骤3.3:计算每一个粒子的权重,其中每个粒子权重正比于在该粒子位置观测到 当前VLP位置坐标测量值的概率: 其中 为粒子k在t时刻的权重, 为可见光室内定位的结果,σ21 、σ22 为可见光测量值的方差; 步骤3.4:计算当前有效粒子数,若有效粒子数小于设定阈值,则进行重采样: 其中Neff为有效粒子数, 为归一化后粒子的权重; 步骤3.5:计算由该N个粒子拟合的位置置信度分布的期望值,该期望值为滤波后 的当前行人位置估计; 步骤3.6:重复从步骤3.2开始的以上步骤。 进一步地,在使用手机端上的三轴加速度传感器获取手机加速度信息后,通过滤 波的方法减少重力加速度和噪声对加速度信息的影响。 进一步地,在所述步骤2中,通过磁力传感器计算航向,其方法如下: 7 CN 111551181 A 说 明 书 4/8 页 其中atan2(y ,x)的算法为: 为由磁 力传感器计算得到的航向角, 为在世界坐标系上的测量值, 为在局部坐标系中 的测量值, 为y轴上的测量值, 为在x轴上的测量值, 为地磁北方向相 对正北方向的偏差。 进一步地,在所述步骤2中,通过陀螺仪计算航向,其方法如下: 其中 为通过陀螺仪测量的航向角, 为在世界坐标系下z轴的角加速 度。 采用上述方案,行人在室内手持手机,手机上的CMOS图像传感器实时对LED灯进行 拍摄,通过卷帘效应获得LED灯对应的条纹图片,再通过手机APP对传输的图片进行图像处 理技术得到解码后的LED-ID特征,计算得到可见光定位技术的结果。同时利用智能手机上 搭载的加速度传感器、陀螺仪以及磁力传感器进行行人航位推算得到行人的航位信息。将 上述两者的结果引进到粒子滤波器中,通过滤波最终实现高精度、高鲁棒性的室内定位结 果。相对其他现有的室内定位技术,本室内定位方法精度高、安装成本低、稳定可靠,在大型 商场、大型地下停车场、机场和大型仓库等场景拥有良好的应用前景。并且,本发明利用原 有的LED灯、智能手机以及事先安装在手机上的APP,便完成了本发明所有硬件准备,只需对 智能手机进行开发和调制室内LED灯即可,无需对场景进行不必要的改造,因此成本低廉, 具有广阔的市场前景。 附图说明 图1为本发明的整体框架示意图。 图2为本发明VLP定位模型的示意图。 图3为本发明粒子滤波的示意图。











