
技术摘要:
本发明公开了一种立体停车智能控制系统,包括停车智能控制系统,所述停车智能控制系统的输入端与供电模块的输出端电性连接,所述停车智能控制系统的输出端与显示模块的输入端电性连接,所述停车智能控制系统与停车预测调节模块、停取车时长控制模块和新兴车辆驾驶控制 全部
背景技术:
停车场是供车辆停放之场所。停车场有仅画停车格而无人管理及收费的简易停车 场,亦有配有出入栏口、泊车管理员及计时收款员的收费停车场。现代化的停车场常有自动 化计时收费系统、闭路电视及录影机系统。停车场主及管理员的法律责任,通常只是提供场 地给驾车人士停泊车辆,不保障车辆受损及失车责任,一般会贴合约免责条款于停车场大 门之外供车主参阅。立体停车是指利用空间资源,把车辆进行立体停放,节约土地并最大化 利用的新型停车。立体停车场最大的优势就在于其能够充分利用城市空间,被称为城市空 间的“节能者”,立体停车场的出现与汽车的三次工业革命息息相关。 传统的立体停车场在对汽车进行停车控制管理时,一般仅仅根据汽车的先后到来 次序对汽车停车进行管理,没有对停车的高峰进行规划,没有对停车费用进行规划,并且缺 乏对新兴车辆进行智能控制,不方便驾驶员使用。
技术实现要素:
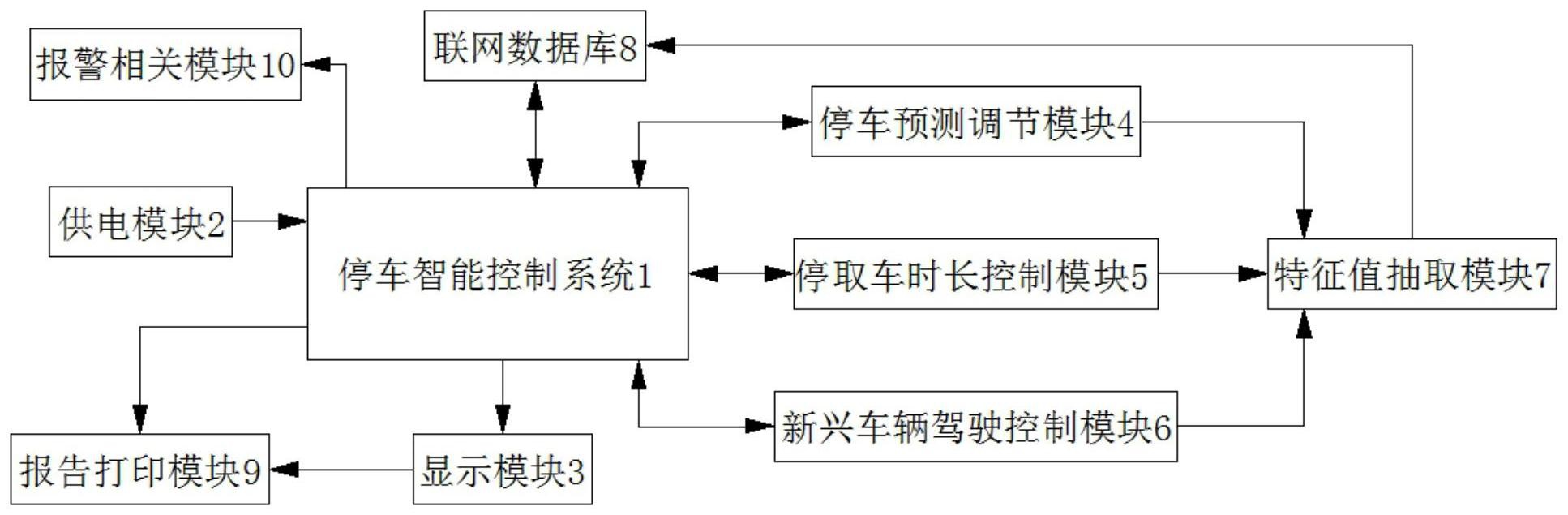
(一)解决的技术问题 针对现有技术的不足,本发明提供了一种立体停车智能控制系统,解决了传统的 立体停车场在对汽车进行停车控制管理时,一般仅仅根据汽车的先后到来次序对汽车停车 进行管理,没有对停车的高峰进行规划,没有对停车费用进行规划,并且缺乏对新兴车辆进 行智能控制,不方便驾驶员使用的问题。 (二)技术方案 为实现以上目的,本发明通过以下技术方案予以实现:一种立体停车智能控制系 统,包括停车智能控制系统,所述停车智能控制系统的输入端与供电模块的输出端电性连 接,所述停车智能控制系统的输出端与显示模块的输入端电性连接,所述停车智能控制系 统与停车预测调节模块、停取车时长控制模块和新兴车辆驾驶控制模块实现双向连接,所 述停车预测调节模块、停取车时长控制模块和新兴车辆驾驶控制模块的输出端与特征值抽 取模块的输入端电性连接,所述特征值抽取模块的输出端与联网数据库的输入端电性连 接,所述停车智能控制系统的输出端与报告打印模块和报警相关模块的输入端电性连接, 所述停车预测调节模块包括过往停车量分析模块、停车模型选取模块、多结果推断模块、即 时停车量收集模块和停车量预测模块。 优选的,所述过往停车量分析模块的输出端与停车模型选取模块的输入端电性连 接,所述停车模型选取模块的输出端与多结果推断模块的输入端电性连接。 优选的,所述多结果推断模块的输出端与即时停车量收集模块的输入端电性连 接,所述即时停车量收集模块的输出端与停车量预测模块的输入端电性连接。 优选的,所述停取车时长控制模块包括基本停车时长控制模块、停车价格控制模 3 CN 111553523 A 说 明 书 2/4 页 块、停车消费控制模块和停车积分控制模块,所述基本停车时长控制模块的输出端与停车 价格控制模块的输入端电性连接。 优选的,所述停车价格控制模块的输出端与停车消费控制模块的输入端电性连 接,所述停车消费控制模块的输出端与停车积分控制模块的输入端电性连接。 优选的,所述新兴车辆驾驶控制模块包括无人驾驶停车控制模块、电动汽车停车 控制模块、氢能源汽车停车控制模块和天然气汽车控制模块,所述无人驾驶停车控制模块 的输出端与电动汽车停车控制模块的输入端电性连接。 优选的,所述电动汽车停车控制模块的输出端与氢能源汽车停车控制模块的输入 端电性连接,所述氢能源汽车停车控制模块的输出端与天然气汽车控制模块的输入端电性 连接。 (三)有益效果 本发明提供了一种立体停车智能控制系统。与现有技术相比,具备以下有益效果: (1)、该立体停车智能控制系统,通过停车预测调节模块包括过往停车量分析模 块、停车模型选取模块、多结果推断模块、即时停车量收集模块和停车量预测模块,过往停 车量分析模块的输出端与停车模型选取模块的输入端电性连接,停车模型选取模块的输出 端与多结果推断模块的输入端电性连接,多结果推断模块的输出端与即时停车量收集模块 的输入端电性连接,即时停车量收集模块的输出端与停车量预测模块的输入端电性连接, 通过停车预测调节模块的设置,使得系统能够基于对过去停车高峰的总结从而较为准确的 判断,以便能够对后续高峰期间的停车时长进行有效规划,并且通过多结果选取的方式进 行预测,进而实现精准预测。 (2)、该立体停车智能控制系统,通过停取车时长控制模块包括基本停车时长控制 模块、停车价格控制模块、停车消费控制模块和停车积分控制模块,基本停车时长控制模块 的输出端与停车价格控制模块的输入端电性连接,停车价格控制模块的输出端与停车消费 控制模块的输入端电性连接,停车消费控制模块的输出端与停车积分控制模块的输入端电 性连接,通过停取车时长控制模块的设置,系统通过价格、消费和消费积分等调节对使用者 的停车时间进行消费控制,进而有效的控制停车时长。 (3)、该立体停车智能控制系统,通过新兴车辆驾驶控制模块包括无人驾驶停车控 制模块、电动汽车停车控制模块、氢能源汽车停车控制模块和天然气汽车控制模块,无人驾 驶停车控制模块的输出端与电动汽车停车控制模块的输入端电性连接,电动汽车停车控制 模块的输出端与氢能源汽车停车控制模块的输入端电性连接,氢能源汽车停车控制模块的 输出端与天然气汽车控制模块的输入端电性连接,通过新兴车辆驾驶控制模块的设置,系 统通过对无人驾驶车辆等新兴车辆的分类管理,从而方便新兴车辆的使用,有效的提升了 驾驶员的停车体验,并且停车逻辑简单,方便驾驶员操作。 附图说明 图1为本发明的系统原理框图; 图2为本发明停车预测调节模块的系统原理框图; 图3为本发明停取车时长控制模块的系统原理框图; 图4为本发明新兴车俩驾驶控制模块的系统原理框图。 4 CN 111553523 A 说 明 书 3/4 页 图中,1、停车智能控制系统;2、供电模块;3、显示模块;4、停车预测调节模块;41、 过往停车量分析模块;42、停车模型选取模块;43、多结果推断模块;44、即时停车量收集模 块;45、停车量预测模块;5、停取车时长控制模块;51、基本停车时长控制模块;52、停车价格 控制模块;53、停车消费控制模块;54、停车积分控制模块;6、新兴车辆驾驶控制模块;61、无 人驾驶停车控制模块;62、电动汽车停车控制模块;63、氢能源汽车停车控制模块;64、天然 气汽车控制模块;7、特征值抽取模块;8、联网数据库;9、报告打印模块;10、报警相关模块。











