
技术摘要:
本发明公开了一种混合交通场景下智能网联车辆控制算法的性能评价方法及装置,该方法包括:S1,初始化道路场景及车辆状态;S2,对ICV的纵向运动行为进行建模;S3,对HDV的纵向运动行为进行建模;S4,进行Type1和Type2两种仿真实验;S5,根据Type1实验输出的实验数据,利 全部
背景技术:
近二十年来,随着我国汽车保有量的爆发式增长,交通拥堵成为了制约现代城市 社会经济发展的重要因素。传统的交通基础设施、交通服务能力和交通管理能力已无法应 对日益严峻的交通拥堵问题,而基于车联网和自动驾驶技术的智能网联车辆(Intelligent and Connected Vehicle,ICV)技术,则在近年来被认为能有效改善交通拥堵问题,提高交 通效率。 在网联车辆纵向控制领域,已经诞生了诸多技术,典型代表如自适应巡航控制 (Adaptive Cruise Control,ACC)、协同自适应巡航控制(Cooperative Adaptive Cruise Control ,CACC)、网联巡航控制(Connected Cruise Control ,CCC)和车辆队列控制 (Vehicle Platoon Control)等。在这些技术之下,现有研究又开发了大量各异的算法。在 所有车辆均网联且可控的情况下,这些算法能有效避免驾驶员反应延迟和行为不确定性的 影响,从而减少交通拥堵的情况;此外,也能在保障行车安全的基础上,降低车头间距,提高 行驶速度,从而极大提升交通效率。 现有研究在评价这些算法性能时,多针对所有车辆全部自动驾驶的工况,在实际 的智能网联车辆技术推广过程中,势必会存在一个长期的过渡阶段,即ICV(英文全称为 “Intelligent Connected Vehicle”,中文全称为“智能网联车辆”)与HDV(英文全称为 “Human-Driven Vehicle”,中文全称为“驾驶员驾驶车辆”)共存的混合交通工况。在混合交 通场景下,评价智能网联车辆控制算法的性能对智能网联车辆技术的发展与推广具有重要 的实际意义。但现有研究缺乏系统地针对混合交通场景下智能网联车辆控制算法的性能评 价方法。
技术实现要素:
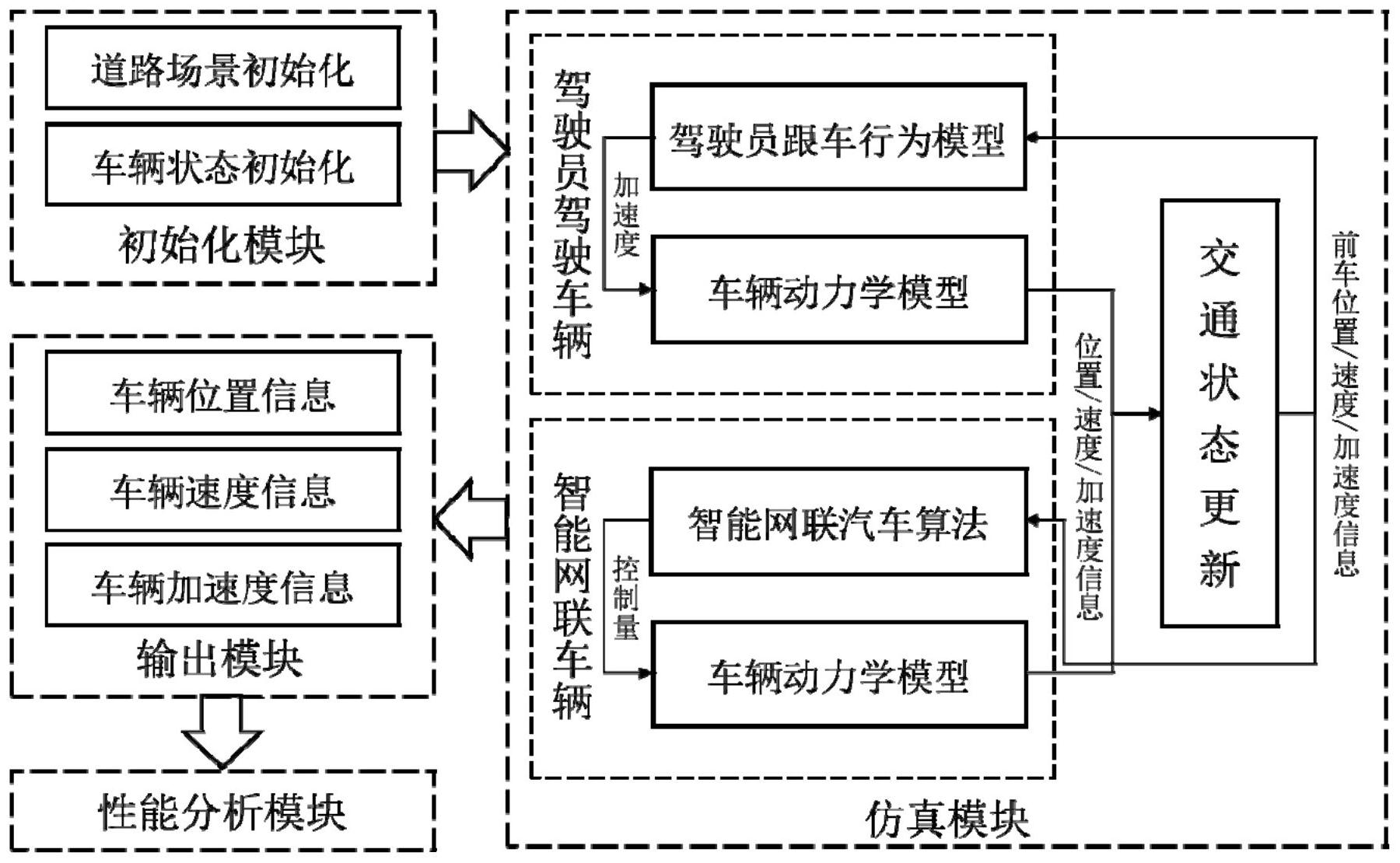
本发明的目的在于提供一种混合交通场景下智能网联车辆控制算法的性能评价 方法及装置来克服或至少减轻现有技术的上述缺陷中的至少一个。 为实现上述目的,本发明提供一种混合交通场景下智能网联车辆控制算法的性能 评价方法,该方法包括: S1,初始化道路场景以及车辆队列中各车辆状态;其中,“初始化道路场景”包括布 置单车道直路场景、设计道路总长、车辆总数和平衡态交通流速度;“初始化各车辆状态”包 括车辆队列中各车辆的初始速度、初始加速度和相邻车辆之间的初始间距;车辆队列中各 车辆包括ICV和HDV; S2,对ICV的纵向运动行为进行建模,得到待评价的智能网联车辆纵向控制算法; S3,对HDV的纵向运动行为进行建模,得到驾驶员驾驶车辆模型; 5 CN 111586130 A 说 明 书 2/11 页 S4,根据所述初始化道路场景以及各车辆状态、智能网联车辆纵向控制模型和驾 驶员驾驶车辆模型,进行Type1和Type2两种类型的仿真实验,以获得相应类型的实验数据; 其中,Type1类型是ICV典型分布情况下单次仿真实验,Type2类型是ICV随机分布情况下多 次仿真实验;所述仿真实验包括在稳定运行交通流中引入外部弱扰动和强扰动; S5,根据Type1类型仿真实验输出的实验数据,对所测试的智能网联车辆纵向控制 算法进行评价,评价方法包括车辆轨迹数据分析方法、归一化扰动均值分析方法和分段扰 动均值变化曲线分析方法中的一种或多种; S6,根据Type2类型仿真实验输出的多次实验数据,计算多个预设指标,并取各所 述预设指标的多次实验的平均值进行分析,绘制各指标-渗透率曲线,对所测试的智能网联 车辆算法在混合交通场景下的性能进行综合评价;其中,所述预设指标包括:平均速度、交 通激波特征参数和交通流平均匀质性指数中的一种或多种。 进一步地,Type1类型仿真实验具体为: 预设ICV的市场渗透率r={10%,20%,…,90%,100%},在每一个预设市场渗透 率r下进行一次仿真实验,每次仿真实验设置为:在某一预设市场渗透率下,第Nr辆车为 ICV,随后每隔Nr-1辆车为ICV,其余车辆均为HDV。 进一步地,所述归一化扰动均值分析方法包括: 在每个渗透率r下,定义ICV归一化扰动均值PET_ICV的计算公式为下式(10),定义 HDV归一化扰动均值PET_HDV的计算公式为下式(11),PET_ICV越小表示其对应的智能网联 车辆算法对自身的扰动控制能力越好,PET_HDV越小表示其对应的智能网联车辆算法对HDV 的扰动衰减能力越好: 式(10)和式(11)中,仿真试验中车队包括1辆领航车以及N辆跟随车辆,i为车队中 的车辆编号,S为车队中各车辆的编号构成的集合,SAV为ICV的编号构成的集合,Tf为仿真结 束时间,vi(t)为编号为i的智能网联车辆t时刻所在的速度,v*为预设的平衡态交通流速度。 进一步地,所述分段扰动均值变化曲线分析方法包括: 在每一个预设的市场渗透率r下,共有Nr段,基于相邻两辆ICV之间的HDV,定义第k 段(k=1,...,Nr)的分段扰动均值表示为式(12): 基于式(12)计算得到的分段扰动均值,绘制PET(k)-k曲线,该曲线上的k点处数值 越低,说明在该段的扰动程度越小;曲线随着k增大下降越快,说明扰动衰减速率越快,以综 合评价该智能网联车辆算法对交通流局部扰动的影响程度。 进一步地,Type2类型仿真实验具体为: 6 CN 111586130 A 说 明 书 3/11 页 预设ICV的市场渗透率r={10%,20%,...,90%,100%},在每一个预设市场渗透 率下进行n次仿真实验,每次仿真实验设置为:ICV的数量为r/N,ICV的位置随机分布在N 1 辆车中。 进一步地,所述交通激波特征参数包括激波范围SR与激波持续时间SDT,激波范围 SR的计算公式为下式(14),激波持续时间SDT的计算公式为下式(15),激波范围SR与激波持 续时间SDT越小表示其对应的智能网联车辆算法在混合交通场景下的提升交通效率的性能 越好; 式(14)和式(15)中,pi(t)为编号为i的车辆在t时刻位于道路上的位置, 为编 号为i的车辆受激波影响的初始时刻, 为编号为i的车辆受激波影响的终了时刻,Sw为受 激波影响的车辆编号的集合,所述受激波影响的车辆ai(t)为加速度小于加速度阈值且持 续时间达到预设时长的车辆。 进一步地,所述交通流平均匀质性指数是n次仿真实验获得的交通流匀质性HOM数 值的平均值,交通流匀质性指数HOM的计算公式为下式(16),所述交通流平均匀质性指数越 小表示其对应的智能网联车辆算法在混合交通场景下的提升交通效率的性能越好; 式(16)中,vi(t)表示编号为i的车辆t时刻所在的速度,vi-1(t)表示编号为i-1的 车辆t时刻所在的速度,Tf为仿真结束时间。 进一步地,所述仿真实验还包括: 初始化各车辆状态:设定各车辆的初始速度vi(0)、初始加速度ai(0)、平衡态交通 流速度v*、以及相邻车辆之间的初始间距; 所述稳定运行交通流包括:自仿真实验开始直至t1时刻的期间内以及所述弱扰动 和强扰动直至仿真实验结束时刻期间,领航车速度保持为平衡态交通流速度v*; 所述弱扰动中,设定领航车运动轨迹如下: 在自仿真实验t1时刻直至t2,1时刻的期间内,领航车以-1m/s2的加速度进行紧急制 动; 在自仿真实验t2,1时刻直至t3,1时刻的期间内,领航车保持速度匀速行驶; 在自仿真实验t3,1时刻直至t4,1时刻的期间内,领航车以1m/s2加速度恢复至v*的速 度; 所述强扰动中,设定领航车运动轨迹如下: 在自仿真实验t1时刻直至t2,2时刻的期间内,领航车以最大制动强度进行紧急制 动; 在自仿真实验t2,2时刻直至t3,2时刻的期间内,领航车保持速度匀速行驶; 在自仿真实验t3,2时刻直至t4,2时刻的期间内,领航车以最大加速度恢复至v*的速 7 CN 111586130 A 说 明 书 4/11 页 度。 本发明还提供一种混合交通场景下智能网联车辆控制算法的性能评价装置,该装 置包括: 初始化模块,其用于初始化道路场景以及车辆队列中各车辆的状态;其中,“初始 化道路场景”包括布置单车道直路场景、设计道路总长、车辆总数和平衡态交通流速度;“对 始化车辆状态”包括车辆队列中各车辆的初始速度、初始加速度和相邻车辆之间的初始间 距;车辆队列中各车辆包括ICV和HDV; 仿真模块,其用于对HDV和ICV的纵向运动行为进行分别建模,分别得到待评价的 智能网联车辆纵向控制算法以及驾驶员驾驶车辆模型,以及用于根据所述初始化道路场景 以及各车辆状态、智能网联车辆纵向控制模型和驾驶员驾驶车辆模型,进行Type1和Type2 两种类型的仿真实验,以获得相应类型的实验数据;其中,Type1类型是ICV典型分布情况下 单次仿真实验,Type2类型是ICV随机分布情况下多次仿真实验;所述仿真实验包括在稳定 运行交通流中引入外部弱扰动和强扰动; 输出模块,其用于记录仿真模块输出的数据,包括车辆队列中各车辆的位置、速 度、加速度随时间变化的信息; 性能分析模块,其用于根据Type1类型仿真实验输出的实验数据,对所测试的智能 网联车辆纵向控制算法进行评价,评价方法包括车辆轨迹数据分析方法、归一化扰动均值 分析方法和分段扰动均值变化曲线分析方法中的一种或多种,以及用于根据Type2类型仿 真实验输出的多次实验数据,计算多个预设指标,并取各所述预设指标的多次实验的平均 值进行分析,绘制各指标-渗透率曲线,对所测试的智能网联车辆算法在混合交通场景下的 性能进行综合评价;其中,所述预设指标包括:平均速度、交通激波特征参数和交通流平均 匀质性指数中的一种或多种。 本发明能够系统地针对混合交通场景下智能网联汽车纵向控制算法的性能评价 方法。 附图说明 图1为本发明实施例提供的混合交通场景下智能网联车辆控制算法的性能评价装 置的示意性框图。 图2为本发明实施例提供的评价方法的示意性流程图。 图3为本发明实施例提供的单车道直路的混合交通场景的示意图。 图4为利用本发明实施例提供的评价方法进行单次仿真实验的示意性流程图。 图5为利用本发明实施例提供的评价方法进行单次仿真实验下的交通激波示意 图。











