
技术摘要:
本发明涉及一种电网电压不平衡条件下MMC‑UPQC的无源性滑模控制方法,该方法根据基尔霍夫定律分别构建串联侧和并联侧的数学模型;对构建的模型进行正负分离,获取串联侧和并联侧的dq轴正负序检测值;根据无源控制理论和数学模型建立MMC‑UPQC的EL模型;判断MMC‑UPQC的 全部
背景技术:
MMC-UQPC的控制策略主要针对电网电压平衡状态下的线性控制,存在反应速度 慢,补偿效果不好,应用性较差,当系统受到扰动时,且控制参数难以确定等问题。由于存在 非线性负载和大量电力电子器件,根据MMC-UPQC拓扑结构构建的动态方程是非线性的,更 适合非线性控制策略如无源控制策略、滑模控制策略、微分平坦控制策略等。由于无源控制 对系统的数学模型及系统参数依赖度高,很难达到最优效果,而滑模控制抖动较大,因此在 电网不平衡时,特别是在中高压和模块数较多时,电压和电流的补偿和治理变得很不理想, 往往难以达到令人满意效果,而电网不平衡是很常见的电网状态,因此,对电网不平衡下 MMC-UPQC的非线性控制策略的研究很有必要。 现有技术在电网电压不平衡条件下对MMC-UPQC采用的无源控制方法的控制器的 系数都是固定的,如中国专利CN201911106352.4的无源控制器,当负载突然增加时,适应性 较差;此外,由于该专利提供的无源控制采用的是基于精确参数的模型,系统参数(如系统 阻抗)会随着时间推移发生变化。装置运行过程中的各种不确定因素,将会对系统运行平衡 点产生影响,从而对控制器的控制性能产生不良影响。即参数难以精确控制,导致其反应速 度慢,且串并联侧补偿效果不佳,适应系统复杂变化的能力较差。
技术实现要素:
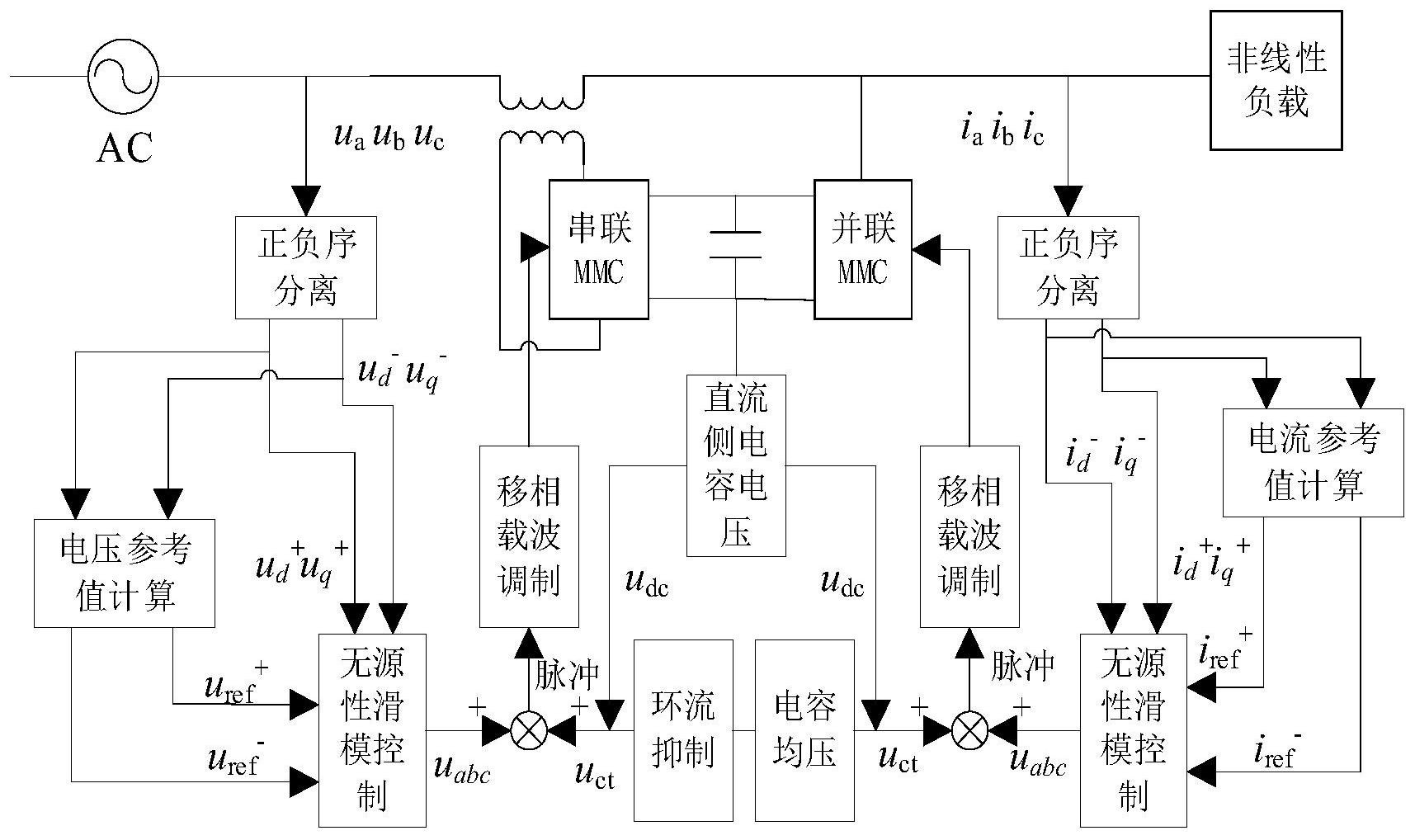
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种电网电压不平 衡条件下MMC-UPQC的无源性滑模控制方法,该方法可综合治理电压和电流的电能质量问 题,设计的无源滑模控制器可解决现有无源控制系统参数难以精确控制,反应速度慢且串 并联侧补偿效果不佳和滑模控制抖动较大难以平衡的问题,而结合直流侧电容电压控制和 串联侧并联侧协调控制,可以很好地解决综合补偿效果不佳且反应速度慢问题,还可以快 速补偿与恢复电压与电流,从而保证电能质量;且本发明还简化了控制系统的结构,加快了 系统的反应速度和稳定性。 本发明的目的可以通过以下技术方案来实现: 一种不平衡电网电压下MMC-UPQC无源性滑模控制方法,包括以下步骤: S1:MMC-UPQC数学模型的建立:根据MMC和UPQC的拓扑结构,基于基尔霍夫定律分 别构建串联侧和并联侧的数学模型。 S2:正负序分离的dq检测法:根据坐标变换理论,先将MMC-UPQC的数学模型变换成 dq旋转坐标系中,再经过正负分离,得到串联侧和并联侧的dq轴正负序检测值。 S3:MMC-UPQC的EL模型建立:根据无源控制理论和S1的数学模型,搭建电网电压不 平衡条件的EL模型。 8 CN 111740429 A 说 明 书 2/19 页 S4:串联侧和并联侧的无源性滑模控制器设计:根据S3的EL模型,判断其无源性, 若为严格无源,再根据滑模控制理论,在无源E-L模型的基础上加入滑模控制,则建立电网 电压不平衡条件下MMC-UPQC无源性滑模控制器。 S5:直流侧电容电压控制:利用无源控制器对电网电压不平衡条件下 MMC-UPQC的 直流侧电容电压进行控制。 S6:环流抑制和均压控制:利用无源控制器对电网电压不平衡条件下 MMC-UPQC的 电容电压和环流进行控制。 进一步地,所述步骤S1中,MMC-UPQC数学模型的表达式为: 串联侧: 并联侧: 式中:k=a、b、c三相中任一相;urk为串联侧MMC输出电压;Lreq为串联侧等效电感, 它是串联侧线路电感和桥臂电感一半的总和;R1为串联侧线路电阻;irk为串联侧线路电流。 进一步地,所述步骤S2中,通过正负序分离的dq检测法,dq两相旋转坐标系下的 MMC-UPQC数学模型的表达式为: 串联侧: 并联侧: 式中:ω为电网基波的角速度,ω=2πf,f=50Hz。 进一步地,所述步骤S3中,电网电压不平衡条件下的MMC-UPQC的EL模型的表达式 为: 式中:s=r、q为串联侧和并联侧;usd1、usq1分别为线路d、q轴电压;usd、usq分别为 MMC的d、q轴电压输出电压;L为等效电感;Rz为线路电阻,id、iq为串联侧线路电流。 EL模型的形式为: 其中, 式中:M为由储能元件构成的正定对角阵;J为分别为正负系统的反对称矩阵; R为 对称正定矩阵,能够反映系统的能量耗散特性;x,为正负系统的状态变量;u为系统的输入 9 CN 111740429 A 说 明 书 3/19 页 变量。 进一步地,所述步骤S4中,具体步骤如下: S401:不平衡电网电压下MMC-UPQC无源性判断; S402:严格无源的情况下确定期望稳定平衡点,获取正负序串联侧和并联侧EL模 型; S403:注入阻尼,加速系统的能量耗散; S404:根据滑模控制理论,采用滑模变结构; S405:采用指数趋近律减抖动,设计MMC-UPQC的无源性滑模控制器。 进一步地,所述步骤S401中,无源性判断具体方法如下: 对于m输入m输出系统为: 式中:x∈Rn,x为正负系统的状态变量;u∈Rm为输入;y∈Rm为输出,是关于x 连续 的;f是关于(x,u)局部Lipschitz的函数。 对于系统,如果存在连续的,半正定能量存储函数H(x)(能量存储函数)及正定函 数 Q(x) ,对于任意t大于0,不等式满足: 或: 对系统的输入u、输出y及能量供给率uTy成立,则可以证明此系统是严格无源的。 本文分别选择的能量存储函数为: 化简得: V=x TMx =x Te e e (u-Jxe-Rxe)=x Te u-x TRx Te e 分别令y=x Te ,Q(x)=x Te Mxe,经过化简推导即可满足以上条件,则说明不平衡电网 电压下MMC-UPQC系统为严格无源的。根据无源控制的理论,严格无源的系统一定可采用无 源控制且控制系统是稳定的。 进一步地,所述步骤S402中,MMC-UPQC的正负序无源控制器为: 系统的期望平衡点为: 式中: 分别为正、负序系统中的状态变量 的参考值; 10 CN 111740429 A 说 明 书 4/19 页 令正、负序系统的状态变量的误差分别为: 得到: 进一步地,所述步骤S403中,阻尼耗散项为: 为了减少系统反应时间,加快运行速度,让其尽快收敛到理想值,误差函数变为0, 需加入注入阻尼矩阵,提高系统的能量的耗散的速度。则变为: 得到正、负序的控制器为: 串联侧无源控制器: 并联侧无源控制器: 其中, 分别为MMC的d、q轴正序和负序电压输出电压, 分别为线路d、q轴正序和负序电压。 进一步地,所述步骤S404,滑模变结构控制的具体方法如下: 根据滑模控制理论,在无源E-L模型的基础上加入滑模控制,选取滑模面: 则有: 滑模变结构控制较大的缺点为抖振问题,为削弱抖振,选取指数趋近律:根据滑模 控制的趋近率,令: 11 CN 111740429 A 说 明 书 5/19 页 其中: 式中:调节系数ρ1、ρ2、ρ3、ρ4>0。为减少滑模控制的高频抖动,将符号函数变换成饱 和函数;为减少滑模变结构控制的高频颤抖,利用饱和函数sat( )代替理想滑动模态中的 符号函数sgn( ),即准滑动模态方法,来消除控制力的抖动现象。 则有: 进而可以得出: 其中: 根据上式可得: 所以无源性滑模控制策略为: 12 CN 111740429 A 说 明 书 6/19 页 进一步地,所述步骤S5中的直流侧电容电压控制采用PI控制。控制方法如下: 由采集来的电压信号,进行滤波处理,再进行正负序分离,通过PI控制得到控制信 号与外环获得的补偿电流相结合再进入内环无源控制器,在系统产生补偿电流的同时对直 流侧电容电压进行控制。 进一步地,所述步骤S6中的电容均压控制和环流控制采用PI控制。具体控制方法 如下: 电容均压方面本发明采用平均电容电压控制和电容电压附加平衡控制。 首先检测得到各SM的电压值,求和后得平均值,通过外环PI控制到设定值,再经过 内环PI得到控制量。为了保证每个SM的电压能够稳定在期望值,采用比例调节器(Kp)进行 控制,通过调节电压参考值,实现内部电容电压平衡的效果。 当电网不平衡时,MMC环流比较严重,以a相为例。MMC环流不仅包含直流分量,而且 还包含2倍频的交流分量,MMC中三相环流按照a-c-b顺序流动,并且每一相的环流相加总和 为零,因此,只在MMC内部存在环流。 环流不仅会影响电力电子器件运行,而且会增大系统成本,为了保证波形准确,需 要对抑制产生环流。环流主要有直流分量和2倍频分量组成,其中2倍频分量分为正序、负 序,由于线路中存在变压器,所以交流成分没有零序分量。本发明采用的环流抑制方法为: 首先采用低通滤波器将2倍频分量滤出来,再采用PI控制方法,将其控制到0,不仅省去了正 负序分离,而且可以快速地将各桥臂的环流分量去除。 与现有技术相比,本发明具有以下有益效果: 1)本发明针对电网不平衡下MMC-UPQC系统补偿控制问题,设计了无源性滑模控制 策略,即在检测值正负序分离后,将无源性滑模控制用于电流内环控制,并对电压外环采用 PI控制,结合环流抑制策略进行电能质量恢复,针对中高压电网不平衡问题,本发明MMC- UPQC无源性滑模控制方法很好地解决了无源控制对于系统参数适应性差的问题;相对于PI 控制,本发明无源性滑模控制响应时间更短、稳定性更强、控制效果更好; 2)单纯的无源控制器的系数固定,当负载突然增加时,适应性较差,本发明无源性 13 CN 111740429 A 说 明 书 7/19 页 滑模控制属于变结构控制系统中的一种控制策略,其根据系统的当前状态,有目的地不断 变化,迫使系统按照预定的“滑动模态”的状态轨迹运动,从而使控制系统对参数变化及扰 动不灵敏,且具有快速的响应,滑动模态能够抵抗外部扰动和内部参数对系统的影响,将无 源控制与滑模控制结合使得控制器具有动态响应快、鲁棒性强等特点,因此相对于单纯的 无源控制,本发明无源性滑模控制具有适应系统复杂变化能力强,系统参数更加精确等特 点; 3)本发明的MMC-UPQC无源性滑模控制系统能有效解决电压的谐波、不平衡以及电 流的不平衡、谐波、非线性问题,实验结果证明了本发明所提出的无源控制系统对电压、电 流补偿的有效性和优越性。 附图说明 图1为MMC-UPQC主电路结构图; 图2为本发明电网电压不平衡状态下MMC-UPQC无源性滑模控制框图; 图3为本发明直流侧电容电压控制框图; 图4为本发明平均电容电压控制框图; 图5为本发明电容电压附加平衡控制框图; 图6为本发明环流抑制控制框图; 图7为本发明实施例的注入不同调节系数下的id波形; 图8为本发明实施例的注入不同阻尼系数下的id波形; 图9(a)为本发明实施例的参数变化图; 图9(b)为本发明实施例的无源控制适应参数变化的电压波形; 图9(c)为本发明实施例的无源性滑模控制适应参数变化的电压波形; 图10(a)为本发明实施例的电网电压暂升暂降情况下的电压波形; 图10(b)为本发明实施例的电网电压暂升暂降情况下的串联侧无源性滑模控制下 电压波形; 图10(c)为本发明实施例的电网电压暂升暂降情况下的串联侧无源性滑模控制下 补偿电压波形; 图10(d)为本发明实施例的电网电压暂升暂降情况下的串联侧无源控制下电压波 形; 图10(e)为本发明实施例的电网电压暂升暂降情况下的串联侧无源控制下补偿电 压波形; 图10(f)为本发明实施例的电网电压暂升暂降情况下的串联侧PI控制下电压波 形; 图10(g)为本发明实施例的电网电压暂升暂降情况下的串联侧PI控制下补偿电压 波形; 图11(a)为本发明实施例的电网电压注入谐波情况下的电压波形; 图11(b)为本发明实施例的电网电压注入谐波情况下的串联侧无源性滑模控制下 电压波形; 图11(c)为本发明实施例的电网电压注入谐波情况下的串联侧无源性滑模控制下 14 CN 111740429 A 说 明 书 8/19 页 补偿电压波形; 图11(d)为本发明实施例的电网电压注入谐波情况下的串联侧无源控制下电压波 形; 图11(e)为本发明实施例的电网电压注入谐波情况下的串联侧无源控制下补偿电 压波形; 图11(f)为本发明实施例的电网电压注入谐波情况下的串联侧PI控制下电压波 形; 图11(g)为本发明实施例的电网电压注入谐波情况下的串联侧PI控制下补偿电压 波形; 图12为本发明实施例的三相不平衡不控整流电路; 图13(a)为本发明实施例的电网电压非线性负载情况下的负载电流波形; 图13(b)为本发明实施例的电网电压非线性负载情况下的并联侧无源性滑模控制 下电网电流波形; 图13(c)为本发明实施例的电网电压非线性负载情况下的并联侧无源性滑模控制 下补偿电流波形; 图13(d)为本发明实施例的电网电压非线性负载情况下的并联侧无源控制下电网 电流波形; 图13(e)为本发明实施例的电网电压非线性负载情况下的并联侧无源控制下补偿 电流波形; 图13(f)为本发明实施例的电网电压非线性负载情况下的并联侧PI控制下电网电 流波形; 图13(g)为本发明实施例的电网电压非线性负载情况下的并联侧PI控制下补偿电 流波形; 图14(a)为本发明实施例的电网电压暂升暂降情况下的负载电流波形; 图14(b)为本发明实施例的电网电压暂升暂降情况下的并联侧无源性滑模控制下 电网电流波形; 图14(c)为本发明实施例的电网电压暂升暂降情况下的并联侧无源性滑模控制下 补偿电流波形; 图14(d)为本发明实施例的电网电压暂升暂降情况下的并联侧无源控制下电网电 流波形; 图14(e)为本发明实施例的电网电压暂升暂降情况下的并联侧无源控制下补偿电 流波形; 图14(f)为本发明实施例的电网电压暂升暂降情况下的并联侧PI控制下电网电流 波形; 图14(g)为本发明实施例的电网电压暂升暂降情况下的并联侧PI控制下补偿电流 波形; 图15(a)为本发明实施例的电网电压注入谐波情况下的负载电流波形; 图15(b)为本发明实施例的电网电压注入谐波情况下的并联侧无源性滑模控制下 电网电流波形; 15 CN 111740429 A 说 明 书 9/19 页 图15(c)为本发明实施例的电网电压注入谐波情况下的并联侧无源性滑模控制下 补偿电流波形; 图15(d)为本发明实施例的电网电压注入谐波情况下的并联侧无源控制下电网电 流波形; 图15(e)为本发明实施例的电网电压注入谐波情况下的并联侧无源控制下补偿电 流波形; 图15(f)为本发明实施例的电网电压注入谐波情况下的并联侧PI控制下电网电流 波形; 图15(g)为本发明实施例的电网电压注入谐波情况下的并联侧PI控制下补偿电流 波形。











