
技术摘要:
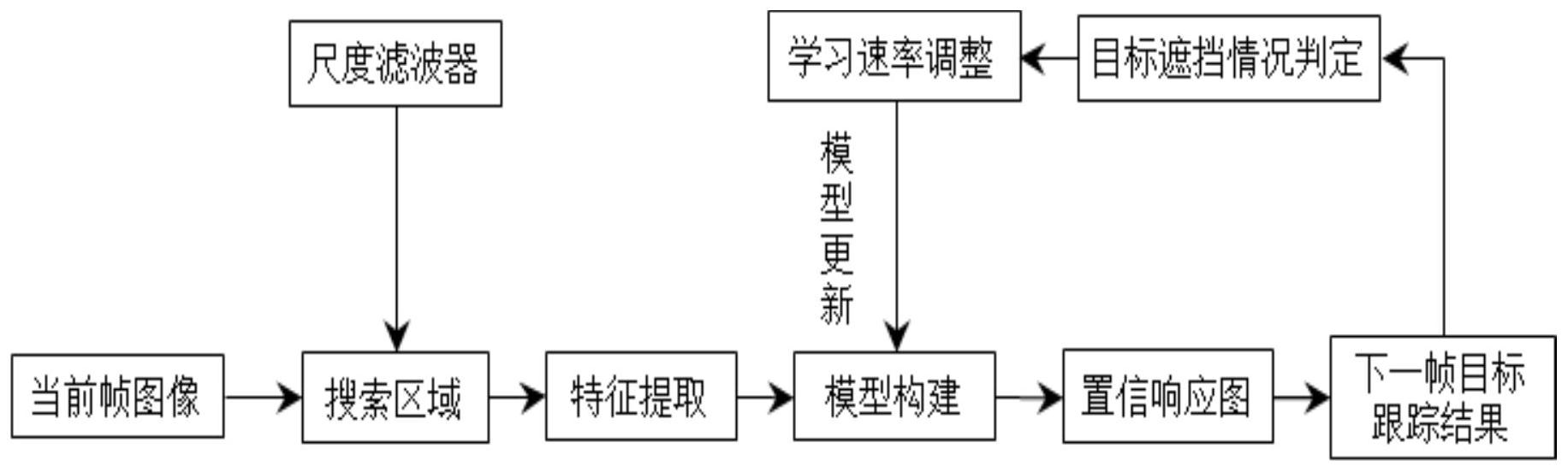
本发明属于计算机视觉技术领域,具体涉及一种结合尺度自适应与模型更新的目标跟踪方法,包括以下步骤:步骤一:根据当前帧目标状态,确定初步搜索区域;步骤二:训练尺度相关滤波器,估计目标尺度变化,从而准确调整搜索区域大小;步骤三:构建训练模型,得到置信响应 全部
背景技术:
随着人工智能技术的发展以及控制理论的完善,计算机视觉逐渐成为研究热点, 其在人们生活及军事领域中的地位日渐突出。目标跟踪利用视频序列之间的上下文信息, 对目标外观信息进行描述,构建相应模型,从而预测并标定目标位置,其作为计算机视觉的 重要组成部分之一,在人机交互、智能监控、医学诊断和体育科学等方面得以广泛应用。近 年来,尽管目标跟踪技术在性能方面得到很大的提升,但是仍然面临光照变化、遮挡、变形、 以及快速变化等一系列的挑战。 相关滤波作为回归判别类模型的典型方法,能够利用最小化误差模型和循环矩阵 理论构建目标背景分类器,计算过程中巧妙地使用快速傅里叶变换来提升速度,后续跟踪 中通过响应值大小预测目标位置。在最小误差平方和理论基础上提出的循环结构模型,利 用循环移位操作采集候选样本集合,通过核函数将低维空间信息转化为高维空间信息,在 一定程度上提高了模型鲁棒性。快速核关联滤波方法利用梯度直方图特征描述目标外观模 型,同时,引进高斯核将特征空间映射到更高维的空间,加快运算速度。针对循环移位产生 的边界效应问题,空间正则相关滤波方法通过加入空间正则惩罚项使得滤波器系数主要集 中在中心区域,有效地解决边界效应问题。 背景感知相关滤波方法利用矩阵论思想,通过二值矩阵裁剪候选样本,可以充分 利用图像的真实背景信息,提高模型训练数据多样性,并采用交替方向乘法器方法求解滤 波器,能够适应目标的背景外观的变化和达到实时跟踪性能。支持相关滤波方法能有效增 大正负样本之间的特征间隔,从而改善滤波器的分类效果。自适应空间加权相关滤波模型 利用自适应空间约束机制,融合多层特征训练位置相关滤波器与尺度相关滤波器,可以有 效提高目标定位精度。自适应上下文感知相关滤波方法利用响应图极值计算结果与阈值之 间的比较值,实现分段调整学习率,有效的提高跟踪模型性能。结合学习率调整的自适应特 征融合采用欧氏距离计算两帧图片之间的变化量,可以判定目标外观是否出现较大变化, 进而调整更新系数的大小,能够有效提高模型性能。 现有典型相关滤波器方法在处理样本选择以及目标外观表示上取得了诸多成果, 但是在对跟踪搜索区域以及模型学习率的自适应调整方法的研究方面还有待深入研究。因 此,本方法针对目标尺度变化以及遮挡因素容易导致目标跟踪漂移的问题,引入尺度滤波 器,依据响应图波动情况进行目标遮挡情况的判定,并制定学习速率调整准则与模型更新 策略,最终设计提出一种结合尺度自适应与模型更新的目标跟踪方法。
技术实现要素:
为了解决现有技术中存在的上述问题,本发明提供了一种结合尺度自适应与模型 4 CN 111583294 A 说 明 书 2/7 页 更新的目标跟踪方法。本发明要解决的技术问题通过以下技术方案实现: 一种结合尺度自适应与模型更新的目标跟踪方法,包括以下步骤: 步骤一:根据当前帧目标状态,确定初步搜索区域; 步骤二:训练尺度相关滤波器,估计目标尺度变化,从而准确调整搜索区域大小; 步骤三:构建训练模型,得到置信响应图;进而依据响应图波动完成遮挡判定; 步骤四:根据遮挡判定自适应地调整模型学习速率大小; 步骤五:通过给定阈值进行相应的训练模型更新。 进一步的,所述步骤二具体为:利用方向梯度直方图特征训练尺度相关滤波器,以 达到目标尺度估计;为获得最佳尺度相关滤波器,最小化目标函数 其中,d为特征维数,wscale为尺度相关滤波器,u为理想输出,fd表示第d维特征通 道,λ为正则化系数,当前帧利用快速傅里叶变换求解,通过求解尺度相关滤波器响应值,以 最大响应值确定目标尺度;假定第t帧目标尺度为st,尺度相关滤波模型得到当前帧对应目 标尺度snew,计算目标尺度变化: Δs=snew-st 若目标尺度相对缩小时,缩小相应搜索区域面积;若目标尺度相对扩大时,扩大相 应搜索区域面积,依据下式变目标搜索区域比例大小 search_asnew=search_asold*(1 Δs) 其中,search_as为跟踪过程中目标的搜索区域比例;通过自适应调整搜索区域比 例大小,从而有效调整目标搜索区域大小 其中,i,j表示矩阵大小,init_tsz表示初始目标大小,featureR表示细胞单元大 小。 进一步的,所述步骤三具体为:背景感知相关滤波器通过密集采样的方法得到充 分样本信息,同时利用掩码矩阵采集真正的负样本信息,该模型通过最小化目标函数学习 多通道背景感知相关滤波器: 其中,y为期望输出的样本标签,xk表示候选样本第k个通道的特征图,[Δτ]为循 环移位算子,hk表示滤波器的第k个通道,P为二值矩阵,其大小为D×T,T为样本特征图大 小,D为样本中目标块特征图大小,λ为正则化参数。 利用快速傅里叶方法将运算由实域转换到频域: 其中,矩阵X表示由各通道样本的循环矩阵构成,大小T×KT, 表示矩阵X的离散 5 CN 111583294 A 说 明 书 3/7 页 傅里叶变换操作, 表示K×T维列向量, 表示克罗内克积,Ik表示K阶单位 矩阵;利用交替方向乘子算法完成优化求解,得到多通道相关滤波器hk。 进一步的,所述步骤四具体为:由Gapce量化滤波器输出的响应图整体波动情况,具 体定义如下: 其中,max(y(i)),min(y(i)),y(i)分别表示响应图最大响应值、最小响应值和每 一个位置的响应值;当最大响应值一定比例超过历史响应值的均值和Gapce值高于阈值时, 表示响应图中位置具有高置信度,即满足下式: Gapce>ζ 其中α1和ζ为经验值,随着目标受到不同程度的遮挡,Gapce持续动态变化,当遮挡程 度越厉害,Gapce值越小,当其小于阈值ζ时,则学习速率处于最小值。 进一步的,步骤五具体为:响应图中位置具有高置信度时,则更新滤波器系数ε和 目标模型F,其更新公式为: 与现有技术相比,本发明的有益效果: 本发明新给出的结合尺度自适应与模型更新的目标跟踪方法能够通过尺度滤波 器有效估计目标尺度,借助平均峰相关能量准则有效的量化响应图波动程度,利用学习率 改进准则与模型更新策略进一步提高模型跟踪性能,可以较为鲁棒的处理存在尺度变化、 遮挡干扰、自身形变等复杂因素影响的目标跟踪情况。 附图说明 图1是本发明方法实现原理框图。 图2是不同情况下的响应图分布。 图3是不同方法对于典型视频序列中目标的部分时刻跟踪效果示意图。 图4是不同方法在典型测试序列集上的性能评价结果示意图。











