
技术摘要:
本发明公开了一种基于LVQ‑GMM算法和多目标优化分割算法的航天器缺陷检测方法,本发明基于LVQ‑GMM和多目标优化分割的航天器缺陷检测方法通过红外热图像序列数据中温度点最大值进行列向搜索比较获得变换列步长,同时利用瞬态热响应曲线中温度最大值对数据进行分块,获 全部
背景技术:
日益恶化的空间碎片环境对航天器带来严重威胁,特别是微小流星体和轨道垃圾 等大量毫米和微米级的微小空间碎片,撞击速度达每秒几公里甚至每秒几十公里,且无法 对其进行跟踪预警和机动规避,对航天器撞击概率极高,危害相当巨大。长期在轨航天器 (如航天飞机、通讯卫星、国际空间站等)均遭受过不同程度的微小空间碎片撞击,并且由于 长期多次撞击产生的累积效应,会导致关键部件和器件发生结构损伤或者功能失效。鉴于 微小空间碎片撞击航天器时间非常频繁,且超高速与低速/高速撞击具有完全不同的损伤 机理和破坏模式,其撞击损伤缺陷非常复杂,因此暴露于空间碎片环境中的各类航天器必 须进行撞击损伤缺陷的检测和评估。我国空间站预计2022 年左右建成,总重量约90吨,预 期在轨寿命10年以上,大型空间站受到空间碎片威胁显著增加,对撞击损伤缺陷的检测精 度提出了更高要求。本发明应用对象——各类长期在轨航天器,对其进行损伤检测直接关 系着航天任务能够是否能够顺利和安全的完成。同时,考虑到检测环境和检测对象的特殊 性,必须采用非接触的原位无损检测方式,且能够获得更加直观、准确的缺陷检测结果。 红外热成像技术具有安全、直观、快速、高效、检测面积大、无接触等优点,在航天 器在轨检测中发挥了重要作用,其基础原理是:基于傅里叶传热与红外辐射原理,当被检对 象受到外部热激励时(太阳光照射或人工光源照射),由于材料缺陷的存在导致热传导过程 受到影响,并表现为被检对象表面瞬态温度响应的差异,通过红外热像仪采集表面温度场 响应,从而了解被检对象表面和内部的缺陷状态。红外成像仪采集到的数据是由多帧红外 热图像构成的红外热图像序列数据,其包含了被检区域内每个像素点的温度变化信息(瞬 态热响应曲线),通过对红外热图像序列数据进行分析和处理,获取缺陷的重构图像,从而 实现对缺陷的准确识别。 由于空间碎片超高速损伤行为的复杂性,通常会导致航天器出现多种不同特征的 损伤模式,比如撞击坑和撞击穿孔等表面损伤,以及不可见的内部层裂、背面剥落等内部损 伤。上述不同损伤模式可能同时存在或部分存在,并表现为红外检测数据中的耦合效应,由 此增加了损伤缺陷检测与评估过程的困难程度和复杂性,难以获得准确的航天器空间碎片 撞击损伤情况。针对被检区域内包含的多种撞击损伤模式,需要通过设计有效的红外热图 像序列数据分析处理方法,来实现对损伤缺陷的检测以及对损伤模式的分类识别,从而为 航天器的空间碎片撞击损伤风险评估提供依据。 在现有技术中,聚类分析作为一种无监督学习算法,其不依赖预先定义的类或带 类标记的训练实例,具有自动确定标记的特点,适用于对损伤模式复杂且不便于人工大量 标记训练样本的数据分类过程。对于数据进行聚类的一般方法有K-Means和模糊C均值 8 CN 111598887 A 说 明 书 2/17 页 (FCM)算法等,其利用每个样本到聚类中心的紧密程度来对数据进行分类。这些基于距离作 为度量依据的方法有一定局限性,多用于处理球状或类球状数据团,且每个数据团的观测 数量应大致相同。这种划分方式在处理数据含有重叠情况时会造成一定的重复划分,影响 由瞬态热响应曲线构成的变换矩阵的正确性,获得的缺陷重构图像缺陷不能满足缺陷识别 的要求。 为了对航天器损伤缺陷进行精确评估,还需要对缺陷的红外重构图像中目标缺陷 区域与背景区域进行有效分离。区别于常规的自然可见光图像,红外图像具有较低的分辨 率和模糊的边缘,尤其是在复杂的检测背景中,由于背景中存在其他热源或者是材料本身 的热反射性强等原因,会导致背景区域重叠和混乱,降低目标与背景之间的对比度,严重干 扰重构图像中的缺陷识别,并对缺陷区域精确提取和类型准确识别造成较大困难。为解决 上述问题,需要通过图像分割算法对原始图像进行处理,将目标区域与背景区域有效分离, 可见,正确分割缺陷成为目标识别过程中的关键步骤。在现有的研究中,通过利用FCM算法 及其改进的算法对图像进行分割,但是这些分割问题往往面向的是一个损伤函数,即一个 目标函数。一方面,如果在充分满足保留细节的前提下,缺陷的检测率虽有一定的提高,但 是也保留了噪声,容易对缺陷识别造成误判,导致误检率的上升。另一方面,若只满足对图 像进行整体去噪,由于微小空间碎片撞击导致的损伤缺陷尺寸小且数量多,这些同噪音近 似的微小缺陷会一并随着去噪过程而去除,降低了缺陷的检测率和检测精度。因此,上述常 规分割方法运用到本发明对象,即缺陷的红外重构图像中,由于不能权衡缺陷的误检率与 检测率,分割效果不尽人意。特别是考虑到红外热图像反映的是试件的热辐射信息,容易受 到环境、成像链路等影响,使得获得的缺陷红外重构图像背景噪声大。同时,由于缺陷区域 与背景区域的表面热辐射能力的差异,使得缺陷的红外重构图像的边缘不够平滑,也不利 于图像分割。
技术实现要素:
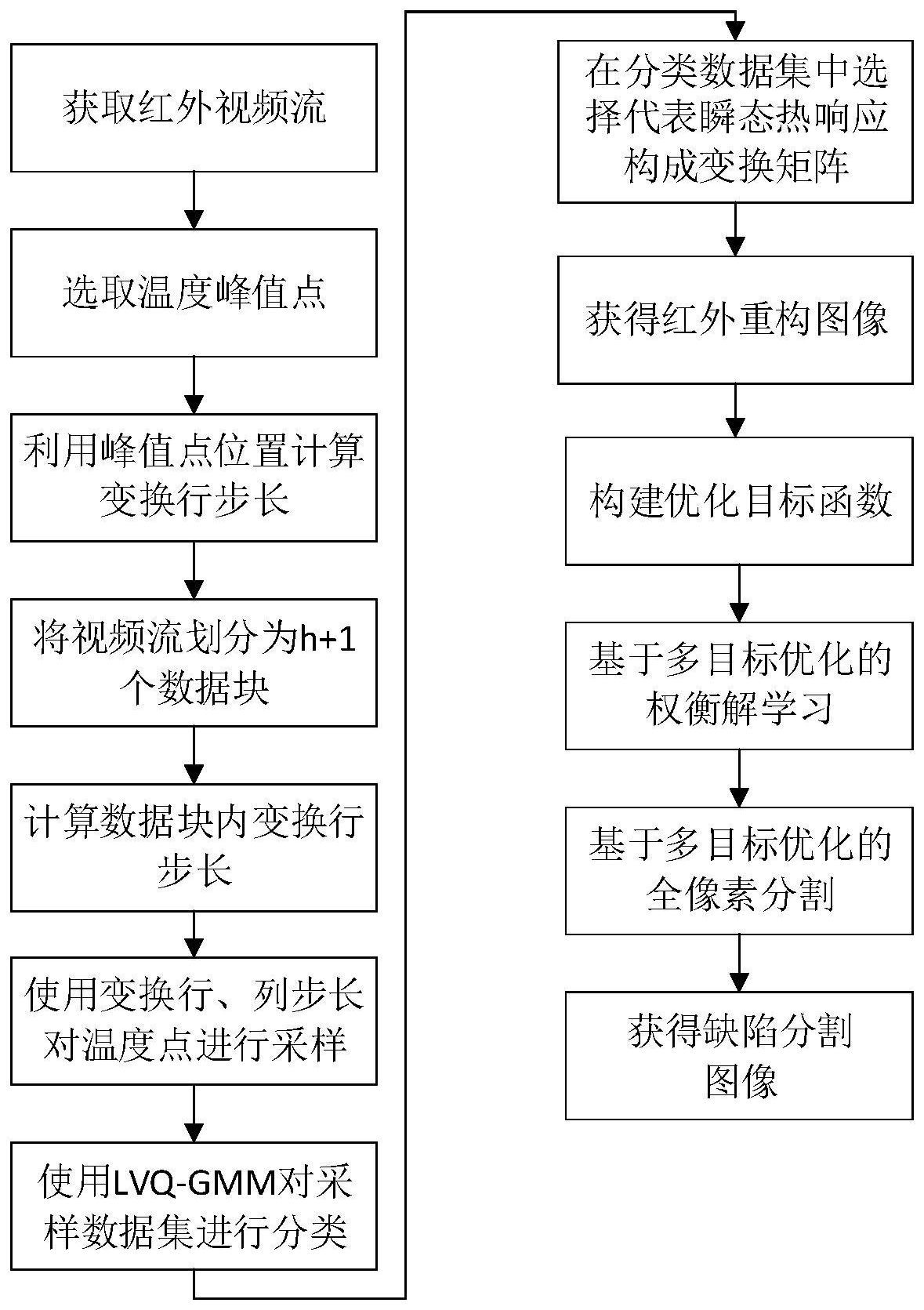
本发明的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优 点。 为了实现根据本发明的这些目的和其它优点,提供了一种基于 LVQ-GMM算法和多 目标优化分割算法的航天器缺陷检测方法,包括以下步骤: 步骤一、利用红外热像仪获得试件红外热图像序列,选取红外热图像序列中温度 最大值点,利用温度最大值点位置计算变换列步长; 步骤二、将图像序列划分为h 1个数据块,并计算数据块内变换行步长,使用变换 行步长、变换列步长对温度点进行采样; 步骤三、使用LVQ-GMM算法,对采集数据集进行分类,获得采样数据集分类对应的 高斯混合模型,从而得到分类数据集的相应概率,利用概率对数据集中每一瞬态热响应曲 线进行分类,在分类数据集中选择代表瞬态热响应构成变换矩阵; 步骤四、利用构成的变换矩阵,经过处理后获得红外重构图像;利用多目标优化的 热图像分割算法,构建优化目标函数对红外重构图像进行背景区域与缺陷区域的分离; 步骤五、最后对全像素的红外重构图像获取整幅观测图像的分割结果,获得试件 缺陷分割图像。 9 CN 111598887 A 说 明 书 3/17 页 优选的是,其中,所述步骤一中红外热图像序列表示为S(m,n,:),m=1,...,m, N =1,...,N,以S(m,n,:)作为初始图像序列,其中m和n分别表示三维矩阵的第m行和第n列, 第三个维度表示红外热图像的帧数d; 从矩阵S(m,n,:)中选取温度值点最大的值LP=max[S(m,n,r)],其中 m=1,..., M;n=1,...,N;r=1,...,d;MLP、NLP和RLP分别是该最大值对应的行值、列值和帧数对应值; 计算红外热图形序列温度最大值点所在的TTRS(M L P ,N L P ,:)与相近温度点 之间的皮尔逊相关系数PCC,将j=j 1带入进行迭代计 算,直到满足PCC≤RefCL,RefCL表示预设列阈值,计算结束,此时统计满足PCC≤RefCL温度点 的个数,并记为CL,CL为变换列步长。 优选的是,其中,所述步骤二包括以下步骤: 步骤S21、从小到大设定h个温度阈值,将温度最大值点S(MLP,NLP,:)所在的列进行 温度划分,得到h 1个数据块,Sw(m,n,:)表示为第w个数据块在 m行n列的瞬态热响应曲线; 步骤S22、选取第w个数据块的最大值 其中 m=1,...,M;n =1,...,N;r=1,...,d,w=1,2,...,h 1;n=1,1 CL,1 2*CL,...,N;按照步骤二的方法获 得w个数据块的行步长 步骤S23、分块进行数据采样:设置阈值EE,将最大瞬态热响应曲线的值S(MLP , NLP,:)存入采样数据集U(:,zg) ,g=1; 计算第w个数据块中温度点Sw(m,n,:)与U(:,zg) ,g=1的皮尔逊相关系数 PCC; 如果PCC<EE,则g=g 1迭代进行计算,直到使得U(: ,z )=Swg (m ,n ,:),否则 计算后更新的Sw(m,n,:)与U(:,zg)的PCC;若m>M使 m=m-M、n=n CL;如果 n>N则结束该数据块采样,并且对所有h 1 个数据块进行步骤S23的处理,从而获得不同变 换特征TTRs的样本数据集U(:,zg) ,g=1,2,...,G。 优选的是,其中,所述步骤三包括以下步骤: 步骤S31、利用LVQ-GMM算法将样本数据集U(:,zg) ,g=1,2,...,G中的TTR 曲线分 为K类,其中G为U中TTRs的总数量; 获取均值向量的初始值:为了获得GMM算法的初始值,将U(:,zg)中G 条TTR曲线进 行假设分类并表示为{(x1,t1) ,(x2,t2) ,....,(xG,tG)}其中 x1=U(:,z1) ,x2=(:,z2) ,..., xi=(:,zi) ,...,xG=(:,zG),ti表示的是样本xi的簇标记;随机从U(:,zg)选取K个TTR{U(:, z1′) ,U(: ,z2′) ,...,U(: ,zK′)}作为初始原型向量并表示为{(q1 ,y1) ,(q2 ,y2) ,...,(qK , yK)},q1=U(:,z1′) ,...,qK=U(:,zK′),y1,y2,...,yK为对应的预设簇标记;从TTR样本集U中 随机选取TTR曲线xi,计算xi与原型向量 qj,1≤j≤K的距离distij=||xi-qj||2,确定j*= argminj∈{1 ,2 ,...,K}distij,找寻距离最近的原型向量 若两者簇标记满足 则 其中学习率η∈(0,1),否则 然后更新原型向量 为q′,迭代次数 E=E 1;判断迭代次数E≤Emax,Emax为最大迭代次数,若满足重复进行步 骤 S31,若不满足则输出此刻的原型向量q1,q2,...,qK作为下一步的GMM聚类时均值向量的 初始值; 10 CN 111598887 A 说 明 书 4/17 页 步骤S32、建立高斯混合概率密度函数来近似采样数据集中的TTRs复杂分布,高斯 混合概率密度函数如公式(1)所示: 其中x1=U(:,z1) ,...,xi=U(:,zi) ,...,xG=U(:,zG)表示的是数据集中的TTR曲 线,θ=(μ1,...,μK,...,Σ1,...,ΣK)是高斯混合分布参数,μ为均值向量,Σ为协方差; 上式为高斯分布的概率密度函数,在本发明中d为红外热图像序列采样帧数;其中 μk的初始值由步骤S31得到的最终计算出的原型向量即μk=qk,k=1,2,...,K; 步骤S33、求得第i个U(:,zi)是来自第k个高斯分布产生的后验概率如(2)式所示: 其中 为拉格朗日乘数,通过新增 循环,使得在原始EM算法的早期迭代过程中减 少后验概率的影响,但随着算法的进行继而将后验概率的作用进行增强;首先令 v=0; 步骤S34、由于(1)式是一个似然函数,使用极大化对数似然函数的方法对(1)式进 行优化,从而得到Q(θ,θv)=E[logp(U,Z|θ)|U,θv],即 求取新的参数 即使用下式更新参数获得θv 1;计算高斯混 合系数 : 计算新均值向量 计算新协方差矩阵 : 步骤S35、增加 若满足停止条件 输出GMM模型参数,否则更新θv=θv 1继 续进行步骤S32至步骤S34; 步骤S36、利用最终得到的模型参数θ确定公式(1),从而根据公式(2) 将样本集U 中G个TTR划分到K个簇,每个样本xi的簇标记用下式确定: 11 CN 111598887 A 说 明 书 5/17 页 将xi划入相应的簇:Ck∪{xi},将TTRs划分到簇集C={C1, C2,...,Ck},即将样本集中TTR划分为K个类型; 步骤S37、从簇集C={C1,C2,...,Ck}的K各簇中选择K个最具代表性的 TTR,即在C ={C1,C2,...,Ck}每一个的簇中选择对应的后验概率最大值 REk=maxγik,k=1,2,...,K; REk对应的瞬态热响应则为第k类的典型热响应曲线,将其存入矩阵H1(:,k) ,k=1,2,...,K 中,获得维度为d×K的线性变化矩阵H1。 优选的是,其中,所述步骤四包括以下步骤: 步骤S41、将S(m,n,:)由三维矩阵转化为二维矩阵,即对红外热视频中每一帧图像 向量化,将每一帧图像矩阵按列取值并排列后得到包含一帧的像素点温度信息的向量且作 为新矩阵的行向量,构建出一个新的二维矩阵 P(x,y)a×b,a=d,b=M×N;用矩阵H1对P进行 线性变换,即 其中 为矩阵H1的K×d维伪逆矩阵;将二维图像矩阵O再按行取 值构成原图像尺寸大小的二维图像,得到K张大小为M×N的红外重构图像; 步骤S42、利用多目标优化的红热图像分割算法对含有M×N个像素的红外重构图 像进行背景区域与缺陷区域的分离;在减少图像噪声及边缘分隔两种目的的指导下构建以 下多目标优化问题,如公式(3)所示: 其中,c为分类数目,v=(v1,...,vc)T表示一组候选聚类中心。 优选的是,其中,所述步骤四构建的优化目标函数包括:用于解决噪声问题的目标 函数单目标噪声去除函数SGNS、用于解决细节保留问题的目标函数单目标细节保持函数 SGDR;其中,构建单目标噪声去除函数SGNS包括以下步骤: 步骤S43、在FCM算法中引入模糊因子,利用重构图像邻域窗内像素点间的欧式距 离dij来确定像素点间的空间约束关系,设计f1(v)表达式如(4)式所示: 其中,W ri 是以像素xi为中心的r×r邻域窗,xj则为红外重构图像中中心像素xi的邻 域像素,m∈[1,∞)为平滑参数, 是红外重构图像中的像素xi与聚 类中心vt的高斯径向基相似度测量函数, 是新的加权模糊因子,它表示像素xi领域内第j个像素关于聚类中心vk的加权模糊因子; 满足 其中空间距离约束ζdc满足 空间灰度约束ζgc满 12 CN 111598887 A 说 明 书 6/17 页 足 其中, 表示像素xj的r×r邻域内所有像 素点Yi的方差与均方的比值, εij为邻域像素点xj与中心像素点xi相应均方差在 核空间投影的值,即 常数2 用以增强邻域像素点对中心像素 点的抑制作用; 步骤S44、利用拉格朗日乘数法对公式(4)求隶属度函数uki: 函数(4)需要满足: 则像素xi相对于聚类中心vk的隶属度为: 构建单目标细节保持函数SGDR包括以下步骤: 步骤S45、考虑像素的空间信息能指导像素分割,同时,考虑图像局部空间信息能 进一步指导图像像素的分割,有利于解决边缘模糊的问题;因此考虑像素的局部空间信息 构造单目标细节保持(SGDR)函数函数f2(v),具体地: 其中,vk是聚类中心,uki是第i个像素对第k个聚类中心的隶属度,这里取 δi表示局部空间信息, 其中,Ni是以第i个像素为中心的邻域窗内像 素的集合,xa是Ni里第a个像素。 优选的是,其中,第一层中,需要对公式(4)进行优化,采用基于切比雪夫的分解策 略求解该问题,将其分解为若干个标量子问题,其中第j个子问题为: 13 CN 111598887 A 说 明 书 7/17 页 上式中, 是第j个子问题的权重向量, 控制噪声抑制函数的权值, 控制细节保留函数的权重;f *1 和f *2 分别两个函数当前的最优函数值; 利用基于分解的多目标进化框架MOEA/D进行求解,求解过程包括以下步骤: 步骤S46、参数设置初始化:多目标优化的目标函数F(v),最大迭代次数gmax,进化 控制参数CR,ε;种群大小N;每个邻域中权重向量的个数T;获取N个均匀分布的权重向量: λ1 ,...,λN ,i=1 ,...,N并计算每个权重向量最近的T 个权重向量B(i)={i1 ,...,iT} , 是λi最近的T个权重向量;在满足多目标问题的可行空间中均匀采样产生初始种群 s1,...,sN,令FVi=F(si)其中i=1,2,...,N;初始化z*=(z * *1 ,z2 ,...,z * Tm ) 满足其为图像分 割多目标问题中的每个目标函数的最优值;设置外部种群EP为空集: 步骤S47、算法更新:当小于最大迭代次数gmax的时候,从B(i)中随机选取两个序号 k,l,运用差分进化算法由sk,sl产生一个对于图像分割多目标问题新的解e;对e进行图像分 割多目标优化问题中所提出的约束条件处理产生e′;更新参考点z:若参考点的数值zj<fj (e′)则zj=fj(e′) ,j=1,...,m;更新邻域解:根据切比雪夫的数学表达式若gte(e′|λj,z)≤ gte(sj|λj,z) ,j∈B(i),则sj=e′,, FVi=F(e′);更新EP:移除所有被F(e′)支配的向量,若F (e′)不被EP里面向量所支配,把e′加入EP; 步骤S48、终止迭代:若满足终止条件g=gmax,输出EP得到最优即得到使图像分割 多目标问题达到最优聚类中心集;否则增加迭代次数g=g 1转到步骤S47。 优选的是,其中,利用上一层输出的权衡解对应的权重向量集EP把对优化函数(4) 实施程度最大的解选取出来,输出到第二层; 第二层中,针对红外热图像的全像素图像有如下的优化函数: 在求解这个目标函数时,由于细节保留函数f2(v)中的分离性度量不含有像素xi关 于聚类中心vk的隶属程度uik,故将对以下函数做拉格朗日乘数法下的隶属度函数和聚类中 心的求解: 为了表示简单,记M(x ,v )=||x -v ||2 α||δ-v ||2 α||τ-v ||2i k i k 1 i k 2 i k ,则隶属度的 更新公式为: 同时,聚类中心的更新公式为: 14 CN 111598887 A 说 明 书 8/17 页 经过多次迭代获得满足优化函数(6)最大化的隶属度和聚类中心,因此,对每个像 素进行分割,以满足最靠近聚类中心的条件,得到分割后的图像,即最终对全像素的红外重 构图像获取整幅观测图像的分割结果。 优选的是,其中,所述步骤一中使用分辨率为512×640的红外热像记录仪记录了 被卤素灯热激励下的试件表面热响应红外热图像序列数据;数据处理实验平台为Windows 10,Intel(R)Core(TM)i5-4260U CPU@1.40GHz, 16GB内存,MATLAB 2017b。 本发明至少包括以下有益效果:本发明基于LVQ-GMM和多目标优化分割的航天器 缺陷检测,使用红外热像仪记录被测对象表面温度场变化,满足原位、非接触的无损检测需 求,通过对红外热图像序列进行分析处理,满足对空间碎片撞击复杂缺陷高精度检测和识 别需求。算法使用变换行列步长的方式对红外热图像序列进行采样,获得具有典型温度变 化特征的瞬态热响应曲线构成的数据集,提高后续数据分类的速度。本发明构造的LVQ-GMM (Learning Vector Quantization-Gaussian Mixture Model)算法,其利用概率对数据集 中瞬态热响应曲线进行划分,由于“概率”较“距离”作为度量依据含有更为丰富的信息量且 更易于比较,能够将重叠区域的数据有效地区分开。由LVQ-GMM算法求取采样数据集分类对 应的高斯混合模型,从而得到了分类数据集的相应概率,对比概率大小对数据集中每一瞬 态热响应曲线进行分类,并选取分类后的典型热响应曲线进行红外热图像重建,获得缺陷 重构图像。在此基础上,本发明进一步利用多目标优化理论进行红外重构图像中的缺陷分 割,针对噪声问题和边缘模糊问题分别构造合适的目标函数以提高分割的精度,既保证了 缺陷的检测率高同时也降低了误检率,从而有效提取出重构图像中的损伤缺陷区域,以便 于航天器空间碎片撞击损伤缺陷的量化研究。同时,本发明还具有如下有益效果: (1)本发明通过使用LVQ-GMM聚类算法增加从平均值和标准差来描述数据,相较K- Means和FCM单一的均值描述有了更好的聚类效果; (2)本发明利用LVQ-GMM聚类算法在不改变分类的准确性的同时较单独使用GMM算 法提高了计算的速度; (3)本发明提出的双层多目标优化的图像分割框架将多目标理论引入,针对需要 被解决的两个目标问题分别目标函数,针对性地解决分割问题,使得获得的分割图像是两 者的权衡,分割获得的结果图像兼具噪声消除和细节保留两种性能。 本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本 发明的研究和实践而为本领域的技术人员所理解。 附图说明: 图1是本发明基于LVQ-GMM和多目标优化分割的航天器缺陷检测方法的基本流程 图; 图2是空间碎片超高速撞击损伤试件图片; 15 CN 111598887 A 说 明 书 9/17 页 图3是FCM聚类结果图; 图4是本实施例中LVQ-GMM聚类结果图; 图5是本实施例中多目标问题求解后得到的PF面图; 图6是本实施例中重构图像缺陷分割结果图和对比方法结果图; 图7为瞬态热响应及相应红外重构图像。











