
技术摘要:
本发明公开了一种基于热成像技术的三维空间定位装置和方法,包括:平台移动装置,移动检测装置和热成像定位装置。所述平台移动装置包括横向平台和横向驱动件,横向平台上侧安装有升降平台和升降驱动件;所述移动检测装置包括弧形轨道,检测平台和检测平台移动机构;所 全部
背景技术:
自然界中,一切物体都会辐射红外线,因此利用探测器测定目标本身和背景之间 的红外线差,可以得到不同的红外图像。红外热成像仪采用红外热成像技术,探测目标物体 的红外辐射,并通过光电转换、信号处理等手段,将目标物体的温度分布图像转换成视频图 像的设备。 摄像机是一种把光学图象信号转变为电信号,以便于存储或者传输。当我们拍摄 一个物体时,此物体上反射的光被摄像机镜头收集,使其聚焦在摄像器件的受光面(例如摄 像管的靶面)上,再通过摄像器件把光转变为电能,即得到了“视频信号”。光电信号很微弱, 需通过预放电路进行放大,再经过各种电路进行处理和调整,最后得到的标准信号可以送 到录像机等记录媒介上记录下来,或通过传播系统传播或送到监视器上显示出来。但是受 到环境因素的影响,如阴雨天、黑夜等情况下,摄像机不能很好的工作。因此需要一种能够 利用一部分物体发热的特性进行三维定位的装置。 市场上现有的尾气检测装置一部分是人工手持,还有一部分是摄像机可视化对 接。其中人工手持对人体造成伤害较大;摄像机可视化对接受到尾气口污染程度,气象条件 等因素影响,经常会出现无法识别的情况。
技术实现要素:
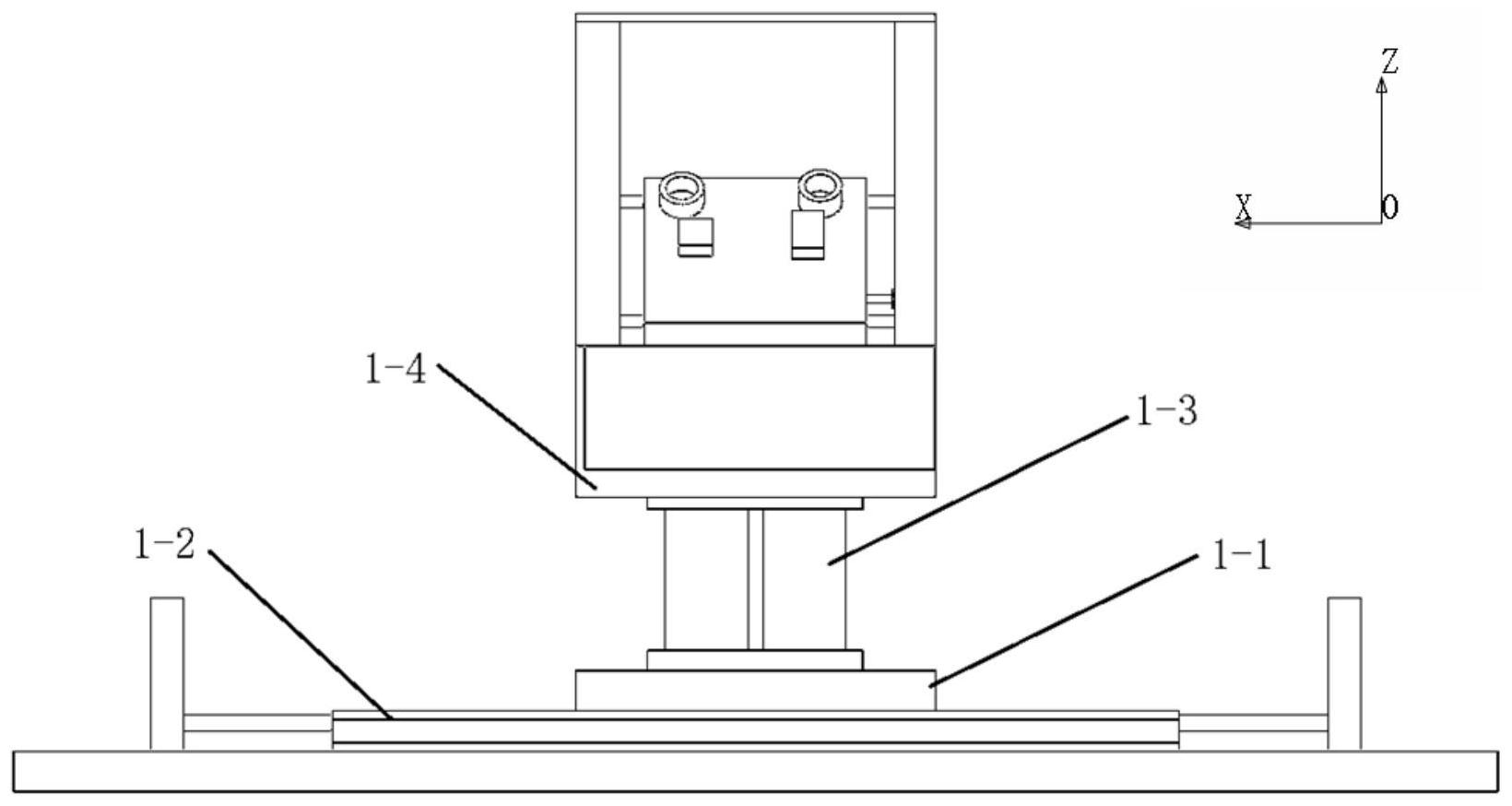
为了克服现有技术中的不足,本发明提出了一种基于热成像技术的三维空间定位 装置及方法,可以利用尾气口排出的热尾气,采用热成像摄像机进行热点标定,判别尾气口 位置,提高抗尾气口污染程度,气象条件等因素影响的能力,提高实用性,实现自动识别、定 位待测位置,现场无人作业、自动化操作。 本发明中主要采用的技术方案为: 一种基于热成像技术的三维空间定位装置,包括平台移动装置、移动检测装置和热成 像定位装置,其中, 所述平台移动装置包括横向平台、横向驱动件、升降平台和升降驱动件,所述横向平台 安装在横向驱动件上,由横向驱动件驱动横向平台沿X轴方向移动,所述升降驱动件安装在 所述横向移动平台上,所述升降平台安装在所述升降驱动件上端,由升降驱动件驱动升降 平台沿Z轴方向移动; 所述移动检测装置包括两根弧形轨道,检测平台和检测平台移动机构,所述检测平台 通过检测平台移动机构滑动连接在两根弧形轨道之间,且沿弧形轨道滑动,两根所述弧形 轨道对称设置,且每根所述弧形轨道的末端通过两块支撑板焊接在升降平台中央; 所述热成像定位装置包括两台热成像摄像机、图像信息识别系统及图像处理系统,两 5 CN 111596284 A 说 明 书 2/5 页 台所述热成像摄像机对称固定在检测平台上半部分,所述图像信息识别系统和图像处理系 统均固定设置在检测平台上,且所述图像信息识别系统和图像处理系统分别与两个所述热 成像摄像机信息连接。 优选地,所述横向驱动件包括两根滑动导轨、丝杠、丝杠电机和两块支架板,两根 所述滑动导轨沿X轴相互平行设置在横向平台底部两侧,且所述横向平台底部与两根所述 滑动导轨滑动连接,两块所述支架板沿X轴对称设置在所述横向平台两侧,所述丝杠的两端 分别与两根所述支架板固定连接,且所述丝杠与所述滑动导轨相互平行,且丝杠电机在丝 杠上运动,所述丝杠电机与所述横向平台底部通过4个丝杠螺母旋转配合连接,所述丝杠电 机通过丝杠螺母与横向平台固定进而实现横向平台的运动。 优选地,所述升降驱动件为气缸,且所述气缸两端分别与所述横向平台顶端和升 降平台底端连接。 优选地,两根弧形轨道对称设置,且两根所述弧形轨道均为半径为200mm的 1/4圆 弧导轨,两根所述弧形轨道的顶端通过限位板焊接组成,两根所述弧形轨道相对的两侧面 上设有弧形导向槽,两根所述弧形轨道的背面焊接有沿弧形导轨设置的齿条和齿条保护 槽。 优选地,所述检测平台移动机构包括支撑平台、四个滑轮、两根支撑杆、传动杆、两 个齿轮、检测平台电机,所述支撑平台固定焊接在检测平台背面,所述传动杆转动连接在所 述支撑平台上,所述传动杆两端分别与所述齿轮固定连接,两根所述支撑杆分别穿设在检 测平台上下两侧两端,且每根所述支撑杆的两端均设有一个滑轮,所述传动杆两端的齿轮 分别与两根所述弧形轨道的齿条相互啮合连接,每根所述支撑杆两端的滑轮分别滑动连接 在弧形导向槽内,所述检测平台电机设置在支撑平台内部,且与所述传动杆驱动连接。 优选地,所述横向平台为长方体结构;所述升降平台为正方体,所述升降平台的初 始位置设定在可升降范围的最低高度。 优选地,所述滑动导轨为工型钢结构。 一种基于热成像技术的三维空间定位方法,具体步骤如下: 步骤1:装置检测开始前位于初始位置,所述初始位置为:横向平台位于待测汽车尾部 左后方,气缸处于长度最短状态,检测平台位于弧形轨道最高处,检测平台上的两台热成像 摄像机拍摄待测汽车尾部的热力学图像,包括左图像L和右图像R,随后将两台所述热成像 摄像机拍摄到的热力学图像分别传输至图像信息识别系统及图像处理系统,所述图像信息 识别系统及图像处理系统对接收到的热力学图像进行图像预处理、图像区域分割,并将其 与存储的位置热力学图像比对,选择目标图像用于进一步确定待测空间位置的所在位置坐 标; 步骤2:所述图像处理系统通过张氏标定对处理后的热力学图像左图像L和右图像R进 行标定,分别获得相对应的两台热成像摄像机的相机内外参数; 步骤3:所述图像处理系统通过步骤2获得的相机内外参数,对左图像L和右图像R进行 校正从而使左图像L和右图像R去除畸变,将两幅图像极线对齐; 步骤4:针对校正过的左图像L和右图像R,利用并行的SGM算法计算,得到视差图,图像 处理系统对获得的视差图进行后处理,利用中值滤波的方法去除噪声,计算待测空间位置 的相对位置坐标,所述图像处理系统将计算出的相对位置坐标通过数据线路传递给横向驱 6 CN 111596284 A 说 明 书 3/5 页 动件,驱动丝杠电机工作从而实现横向平台沿x轴方向运动; 步骤5:所述横向驱动件开始工作,使横向平台从初始位置开始运动,当丝杠电机运动 至与待测空间位置相同的x轴方向的坐标位置时停止运转,横向平台停止移动; 步骤6:所述横向驱动件停止工作后,检测平台的初始位置位于弧形轨道最高处,此时, 两台热成像摄像机进行拍摄,并将拍摄到的热力学图像传输到图像信息识别系统及图像处 理系统,存储的位置热力学图像比对,处理拍摄得到的图像; 步骤7:根据拍摄得到的图像,检测平台移动机构进行运动,检测平台移动机构运行的 过程中,两台所述热成像摄像机不断拍摄热力学图像,实时依次执行步骤中所述相应的图 像预处理、实时标定相对位置坐标,所述图像处理系统将计算出的相对位置坐标通过数据 线路传递给检测平台电机以及气缸,气缸先进行伸长,当气缸运行至实时标定的z轴方向坐 标位置时,控制检测平台电机带动齿轮运转,通过齿轮、齿条啮合,实现检测平台的移动,当 待测位置空间标定的相对位置距离热成像摄像机距离最近时,检测平台电机停止运动,即 运动至对应的y、z坐标; 步骤8:找到待测空间位置后,检测平台电机驱动检测平台恢复至弧形轨道最高处,升 降驱动件收缩至最短位置,丝杠电机回转带动横向平台回到初始位置,检测结束。 有益效果:本发明公开了一种基于热成像技术的三维空间定位装置及方法,现有 的可视化定位装置受到环境因素影响较大,如阴雨天、黑夜、有污染环境等情况下,摄像机 不能很好的工作,本发明利用一部分物体发热的特性通过热成像技术进行三维定位从而能 够在一些工况环境较为恶劣的情况下工作,加装一些检测设备,可以克服可视化定位装置 存在的不可抗弊端。 附图说明 图1为本发明的整体结构示意图; 图2为本发明的横向驱动件装置示意图; 图3为本发明的移动检测装置示意图; 图4为本发明的热成像定位装置示意图; 图5为本发明的检测平台移动机构示意图; 图6为本发明的工作流程图; 图中:横向平台1-1、横向驱动件1-2、升降平台1-3、升降驱动件1-4、滑动导轨2-1、丝杠 2-2、丝杠电机2-3、支架板2-4、弧形轨道3-1,检测平台3-2、限位板3-3、支撑板3-4、齿条3- 5、齿条保护槽3-6、弧形导向槽3-7、热成像摄像机4-1、图像信息识别系统4-2、图像处理系 统4-3、支撑平台5-1、滑轮5-2、支撑杆5-3、传动杆5-4、齿轮5-5。











