
技术摘要:
本发明属于自动化控制技术领域,公开了一种杯子自动抓取交接协同作业系统,包括:杯子盛放架,其用于放置空杯;自动导引机构,其可拆卸连接所述杯子盛放架,并能够驱动所述杯子盛放架旋转和/或移动;取杯滑台,其具有与所述取杯滑台滑动式连接的取杯夹爪,所述取杯夹爪 全部
背景技术:
现有的杯子自动移载大多数由机械手搭配电动夹爪抓取杯子进行传递与放置,或 由直线移载机构托举移载。 机械手搭配电动夹爪抓取杯子进行传递与放置,整体系统布局受限于机械手的臂 长及作业范围,与机械手搭配使用的所有设备或装置进料面都必须面向机械手,统一作业 高度。机械手搭配电动夹爪放置杯子必须有固定装置承托杯子后,电动加爪方可脱离,杯子 交接方式固定重复,自动化机构及机械手的协作能力变差,同时影响整体系统的功能。 机械手作为唯一的传递功能的机构,制程工序仅能串联执行,无法并行同步,工时 长,效率低,存在大量的等待浪费。 因此,本领域需要一种系统作业系统来解决上述问题。
技术实现要素:
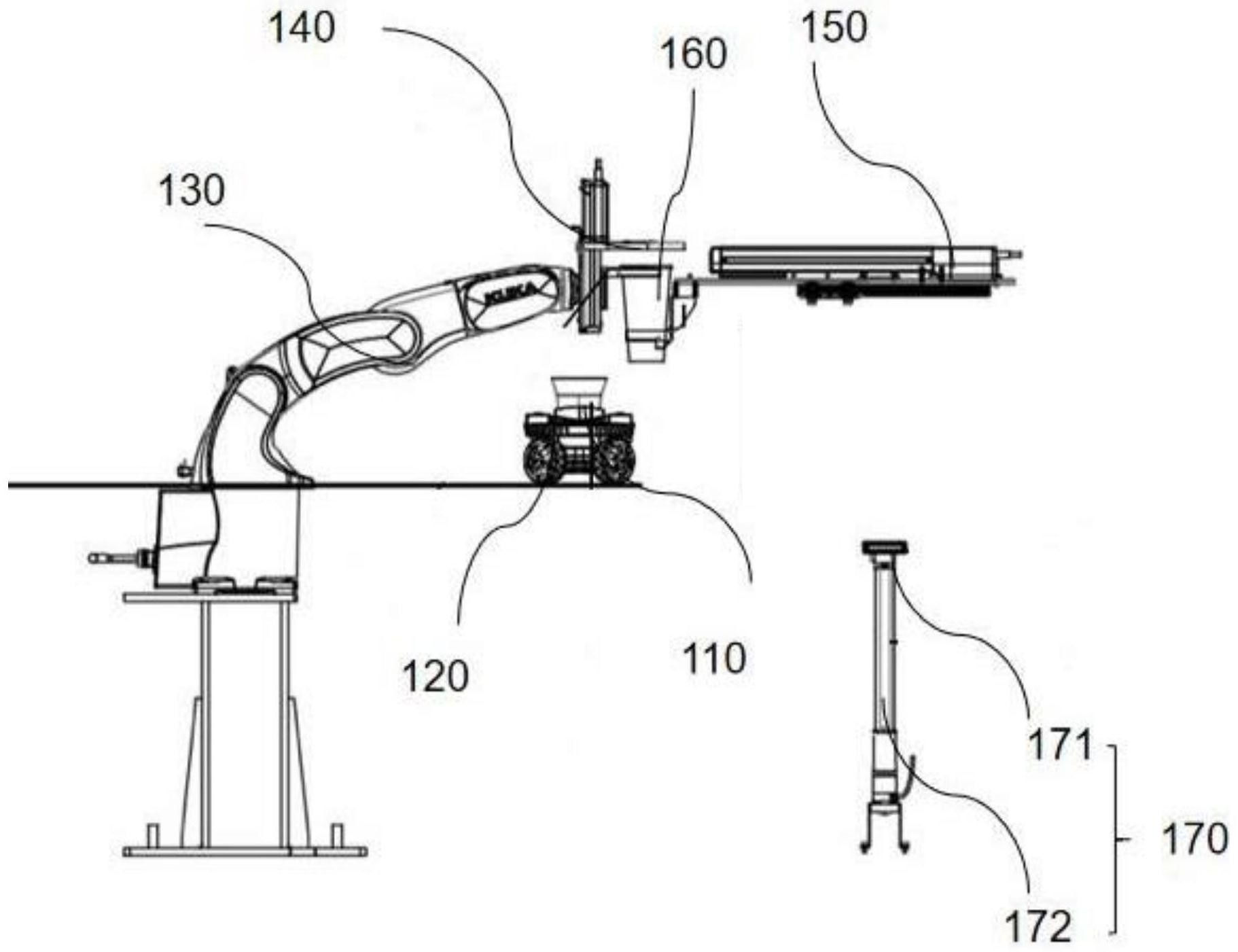
本发明的发明目的是提供一种灵活多样的杯子自动抓取、移载、交接的协同作业 系统,满足自动化机构协同作业的需求,使得整体系统的布局可根据功能模组的大小、外观 需求及应用场景进行灵活布置。 为了解决现有技术中的上述问题,本发明提供了一种杯子自动抓取交接协同作业 系统,包括: 杯子盛放架,其用于放置空杯; 自动导引机构,其可拆卸连接所述杯子盛放架,并能够驱动所述杯子盛放架旋转 和/或移动; 取杯滑台,其具有与所述取杯滑台滑动式连接的取杯夹爪,所述取杯夹爪能够夹 取空杯; 封杯机,其设置在所述取杯滑台一侧,具有接杯夹爪能够夹取并将所述空杯密封。 本领域技术人员能够理解的是,在本发明的优选技术方案中,通过进一步地,还包 括:举升托举机构,能够承接所述密封杯,并进行举升摇晃。 本领域技术人员能够理解的是,在本发明的优选技术方案中,通过进一步地,所述 举升托举机构包括: 杯托; 举升支架,其设置在所述杯托底部。 本领域技术人员能够理解的是,在本发明的优选技术方案中,通过进一步地,还包 括控制系统,其分别连接所述杯子盛放架、自动导引机构、取杯滑台、封杯机和举升托举机 构,并能够控制所述杯子盛放架、自动导引机构、取杯滑台、封杯机和举升托举机构有序工 4 CN 111573265 A 说 明 书 2/6 页 作。 另一方面,本发明还提供了一种杯子自动抓取交接协同作业方法,在上述杯子自 动抓取交接协同作业方法的优选技术方案包括: 步骤一、实时检测ti~ti t0协同作业的实测时间参数向量群,所述实测时间参数 向量群包括:自动导引机构与取杯滑台的对准时间,取杯夹爪抓取到空杯的运动时间,封杯 机的封杯时间和举升机构的举升摇晃时间; 步骤二、根据所述实测时间参数计算空余参数向量群,所述空余参数向量群包括: 自动导引机构与取杯滑台的对准空余时间,取杯夹爪抓取到空杯的运动空余时间,封杯机 的封杯空余时间和举升机构的举升摇晃空余时间; 步骤三、根据所述空余参数向量群修正(ti t0)~(ti 2t0)时刻表示协同作业指征 的向量群;以及 将所述表示协同作业指征的向量群作为协同作业结果输出。 本领域技术人员能够理解的是,在本发明的优选技术方案中,通过进一步地,所述 步骤二中的空余参数向量群计算公式为: 其中,xj为实测时间参数,Xj,j=1,2,3,4分别为参数自动导引机构与取杯滑台的 对准空余时间,取杯夹爪抓取到空杯的运动空余时间,封杯机的封杯空余时间和举升机构 的举升摇晃空余时间,xjmin和xjmax为相应测量参数中的最小值和最大值。 本领域技术人员能够理解的是,在本发明的优选技术方案中,通过进一步地,修正 的(ti t0)~(ti 2t0)时刻的协同作业指征的向量群计算公式为: Yj=|xj-Xj|; 其中,Yj,j=1,2,3,4为协同作业指征的向量群,分别为(ti t0)~(ti 2t0)时刻的 动导引机构与取杯滑台的对准时间,取杯夹爪抓取到空杯的运动时间,封杯机的封杯时间 和举升机构的举升摇晃时间。 本领域技术人员能够理解的是,在本发明的优选技术方案中,通过进一步地,所述 封杯机的封杯时间由时序控制器控制完成。 本领域技术人员能够理解的是,在本发明的优选技术方案中,通过进一步地,所述 封杯机的封杯时间控制过程为: 步骤1.将所述封杯机的封杯过程分解为n个动作单元,并通过感测单元获得每个 单元的频率配置信号的周期长度; 步骤2.将所述周期长度与预设阈值作比较,当周期长度大于预设阈值时输出高逻 辑电平的时序信号,当周期长度小于预设阈值时输出低逻辑电平的时序信号; 步骤3.根据所述逻辑电平的时序信号输出扫描时序信号; 步骤4.根据所述数据扫描时序信号控制数据输出电路,以及输出电压极性; 其中,所述时序信号包括指示是否存在具有预定频率的数据,使能信号、具有预定 频率的主时钟和具有预定频率的内部时钟。 本领域技术人员能够理解的是,在本发明的优选技术方案中,通过进一步地,所述 扫描时序控制信号包括起始电压和栅极移位时钟。 5 CN 111573265 A 说 明 书 3/6 页 本发明分别利用杯子的顶部、中部和底部,同时完成4种自动化机构对杯子的抓取 和移载,2种夹爪、2种杯托设计,使得交接时各类机构互相避让,完成平移、举升及自由路径 的运动轨迹。依整体系统功能需求,各类制程设备灵活排布组合,通过AGV、机械手、平移机 构、举升机构等多种自动化机构完成杯子的移载,充分利用立体空间堆叠,遵守物流最短路 径原则,使得整体系统更紧凑高效。3、自动化机构与制程设备统一由PLC程式控制,多个工 序同步协同作业,消灭等待浪费,使得自动作业合理、高效。 附图说明 下面参照附图来描述本发明的优选实施方式,附图中: 图1为本发明的杯子自动抓取交接协同作业系统的俯视图。 图2为本发明的杯子自动抓取交接协同作业系统的结构示意图。 图3为本发明所述的封杯机前序作业流程图。 图4为本发明所述的封杯机接序作业流程图。 图5为本发明所述的封杯机中、后序作业流程图。 附图标记: 杯子盛放架110、自动导引机构120、取杯滑台130、取杯夹爪140、封杯机150、接杯 夹爪160、举升托举机构170、杯托171、举升支架172。











