
技术摘要:
本发明公开了一种具有自主变轨功能的轨道式巡检机器人,包括有横移系统、连接于横移系统上的两个抓附系统和动力系统。本发明的抓附系统随着横移系统对应的横移部件移动,实现变轨操作,动力系统随着横移系统两个横移部件的同步驱动实现变轨,从而使得动力系统实现快速 全部
背景技术:
接触网系统作为连接电力机车和轨道交通供电系统的关键环节,是地铁列车的主 要电力来源。刚性接触网在隧道内相对柔性接触网具有一定优势,其接触线无张力,不用设 置下锚装置,不会发生断线事故,具有零部件少,载流量大,安全可靠,维修工作量小等特 点,被广泛地应用于地铁隧道内。由于工作环境恶劣,且长期工作在振动工况下,刚性接触 网的支持、定位、悬挂等装置容易出现松动、脱落或损坏等问题。如果不及时发现并处理,将 引发严重的故障,甚至造成行车事故,带来极大的损失。 轨道式巡检机器人可以在刚性接触网上自主运行,携带高清摄像头对其进行巡 视、检查。由于地铁刚性接触网的布置存在平行分叉的线路,需要巡检机器人具备从其中一 个运行轨道跨越至另外一个运行轨道的变轨功能,从而完成自主巡检。但是,目前的轨道式 巡检机器人只能沿着特定的一段轨道进行巡检,无法进行多轨道变轨巡检任务;或是需要 辅助变轨装置安装在轨道上,从而实现变轨。
技术实现要素:
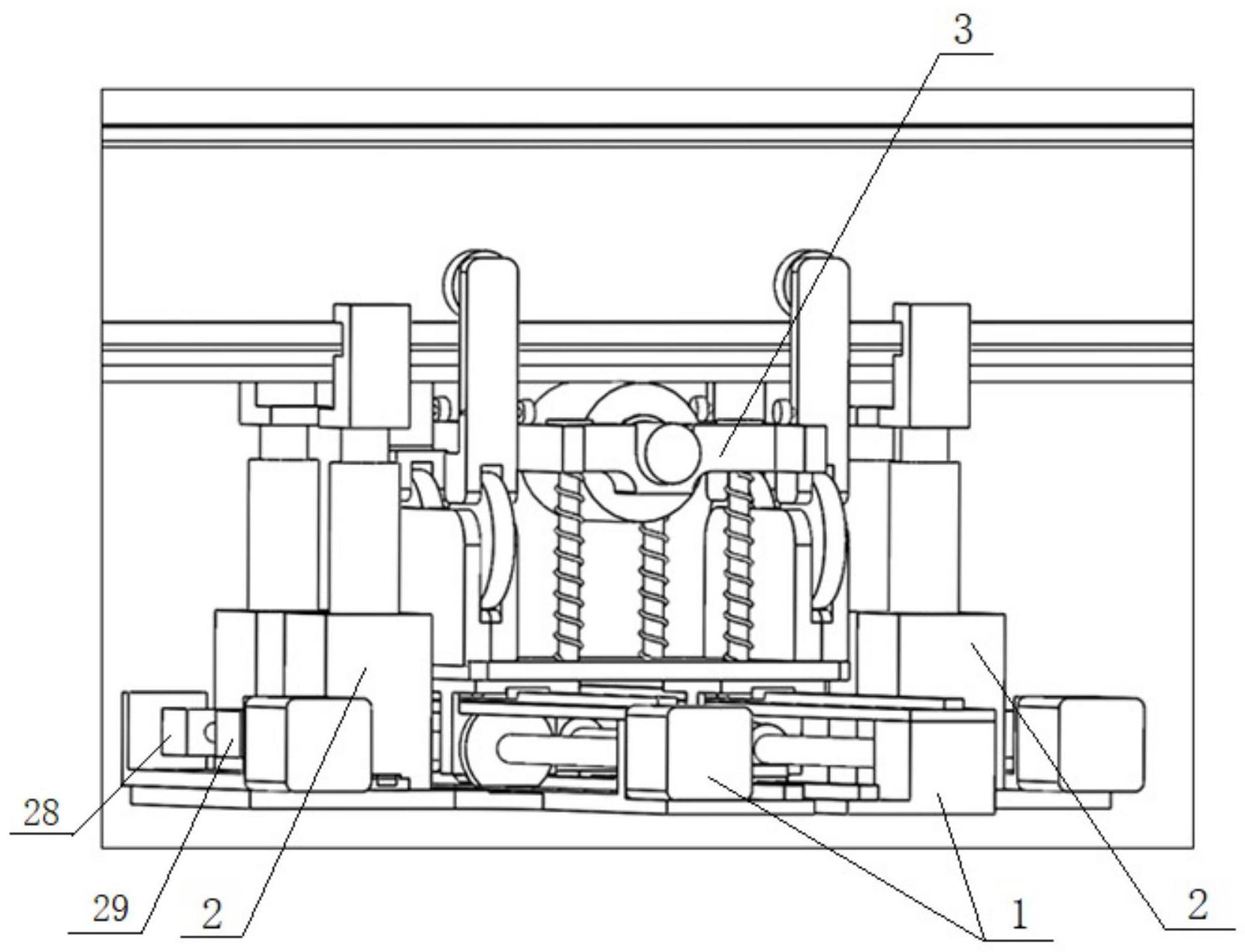
本发明要解决的技术问题是提供一种具有自主变轨功能的轨道式巡检机器人,无 需改变轨道结构或者增加辅助变轨装置,轨道式巡检机器人即可完成自主变轨操作。 本发明的技术方案为: 一种具有自主变轨功能的轨道式巡检机器人,包括有横移系统、连接于横移系统 上的两个抓附系统和动力系统; 所述的横移系统包括有两个横移部件和连接于两个横移部件之间的滑块连接件, 每个横移部件均包括有横移底板、固定设置于横移底板上的横移导轨、设置于横移导轨上 的横移滑块,固定于横移底板上的滚珠丝杠支架、连接于滚珠丝杠支架上的滚珠丝杆螺母 组件、以及连接于滚珠丝杆螺母组件上的螺母连接件,滚珠丝杆螺母组件包括有固定于滚 珠丝杠支架一端的滚珠丝杆驱动电机、连接于滚珠丝杠支架上且与滚珠丝杆驱动电机的驱 动轴连接的滚珠丝杆、套装于滚珠丝杆上的移动螺母,移动螺母与套装于滚珠丝杆上的螺 母连接件固定连接,滚珠丝杠的轴线与横移导轨的轴线相互平行,两个横移部件的横移导 轨相互平行,两个横移部件的横移滑块均与滑块连接件固定连接; 所述的两个抓附系统分别连接于横移系统的两个横移部件上,每个抓附系统均包 括有固定于对应横移底板上的开合导轨和正反丝杆组件、滑动设置于开合导轨上的两个开 合滑块、底端固定于每个开合滑块上的推杆底座、连接于每个推杆底座上的升降推杆、固定 连接于每个升降推杆顶端上的卡爪,正反丝杆组件包括有固定于横移底板上的正反丝杠支 架、固定于正反丝杠支架上的正反丝杠驱动电机、连接于正反丝杠支架上且由正反丝杠驱 4 CN 111605572 A 说 明 书 2/5 页 动电机驱动的正反丝杠、套装于正反丝杠上的正向螺母和反向螺母,所述的开合导轨的轴 线、正反丝杠的轴线均与滚珠丝杠的轴线平行,正反丝杆组件的正向螺母和反向螺母分别 与两个推杆底座一一对应且固定连接; 所述的动力系统包括有安装底板、底端固定于安装底板上的多个导向轴、套装于 每个导向轴上的弹簧、通过轴承套装于多个导向轴上的驱动电机安装框、安装于驱动电机 安装框上的驱动电机、与驱动电机的驱动轴固定连接的驱动轮、固定于安装底板上的多个 齿轮安装座、设置于每个齿轮安装座上的齿轮传动组、开合电机、多组挂轮安装架、以及连 接于每组挂轮安装架顶部的挂轮,所述的安装底板的下端面与两个横移部件的螺母连接件 固定连接,所述的弹簧的底端与安装底板固定连接,弹簧的顶端与驱动电机安装框固定连 接,所述的驱动轮顶端的水平高度高于驱动电机安装框顶端的水平高度,所述的齿轮传动 组包括有与开合电机的驱动轴固定连接的主动齿轮、两个分别与主动齿轮啮合的从动齿 轮,每组挂轮安装架均包括有两个竖直架体,两个竖直架体的底端分别与对应一组齿轮传 动组的两个从动齿轮固定连接,两个竖直架体相对的竖直侧面其顶部均连接有竖直设置的 挂轮。 所述的滚珠丝杠支架的顶端固定有滑轨,滑轨的轴线与滚珠丝杆的轴线平行,滑 轨上滑动设置有与螺母连接件固定连接的动力系统横移滑块,所述的动力系统横移滑块固 定连接于动力系统安装底板的下端面上。 所述的两个抓附系统分别位于对应的横移部件滚珠丝杆螺母组件的外侧。 所述的安装底板上固定有两个齿轮安装座,所述的驱动电机安装框位于两个齿轮 安装座之间,所述的开合电机连接于两个齿轮安装座之间且开合电机背向延伸的两个驱动 轴分别与两个齿轮安装座上齿轮传动组的主动齿轮固定连接。 所述的驱动电机安装框为矩形框架结构,矩形框架结构相对的两条边框之间连接 有所述的驱动轮。 所述的每个抓附系统两个卡爪相对的夹持面上均设置有轨道定位卡槽。 本发明的优点: 本发明的抓附系统随着横移系统对应的横移部件移动,实现变轨操作,动力系统 随着横移系统两个横移部件的同步驱动实现变轨,从而使得动力系统实现快速变轨,变轨 后,动力系统的驱动轮在弹簧的弹力支撑下与变轨轨道的底面紧密接触,提供驱动轮旋转 所需要的摩擦力,驱动电机驱动驱动轮转动使得动力系统带动本发明整个轨道式巡检机器 人实现轨道巡检的功能。本发明无需改变轨道结构或者增加辅助变轨装置,轨道式巡检机 器人即可完成自主变轨;本发明通过调节抓附系统两个卡爪的距离来适应不同宽度的轨 道,通过改变横移系统横移的长度来适应变轨的距离,具备广泛适用性。 附图说明 图1是本发明的结构示意图。 图2是本发明的爆炸图。 图3是本发明实施例中变轨的初始状态图。 图4是本发明实施例中右抓附系统两个卡爪闭合锁定初始轨道的状态图。 图5是本发明实施例中左抓附系统横移至变轨轨道下方的状态图。 5 CN 111605572 A 说 明 书 3/5 页 图6是本发明实施例中左抓附系统两个卡爪锁合变轨轨道的状态图。 图7是本发明实施例中动力系统挂轮打开的状态图。 图8是本发明实施例中动力系统横移至变轨轨道下方的状态图。 图9是本发明实施例中动力系统挂轮锁合变轨轨道的状态图。 图10是本发明实施例中右抓附系统两个卡爪打开的状态图。 图11是本发明实施例中右抓附系统横移至变轨轨道下方的状态图。 图12是本发明实施例中变轨完成的状态图。











