
技术摘要:
本发明公开了一种清洗装置,该清洗装置包括基座、振动发生器及清洗件,其中,基座设有供扫地机器人容纳的清洗位,清洗位上凹设有供扫地机器人的拖布容置的清洁槽,振动发生器设有振动输出端,振动发生器安装于基座内,清洗件安装于清洁槽内,清洗件与振动输出端连接并 全部
背景技术:
随着人们物质生活水平的不断提高,各种智能家居映入眼帘,扫地机器人应运而 生。扫地机器人又称自动打扫机、智能吸尘、机器人吸尘器等,它是智能家用电器的一种,能 凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面 杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸 尘、擦地工作的机器人,也统一归为扫地机器人。 现有扫地机器人在完成清洁工作后,其清扫组件往往粘上很多污渍或杂物等,一 般需要用户自行清理拖布等清扫组件,更换次数较为频繁,浪费了用户大量时间,拖布等清 扫组件的使用寿命也大大降低。因此,如何让扫地机器人自动完成清洗其拖布等清扫组件 的操作成为了亟待解决的问题。
技术实现要素:
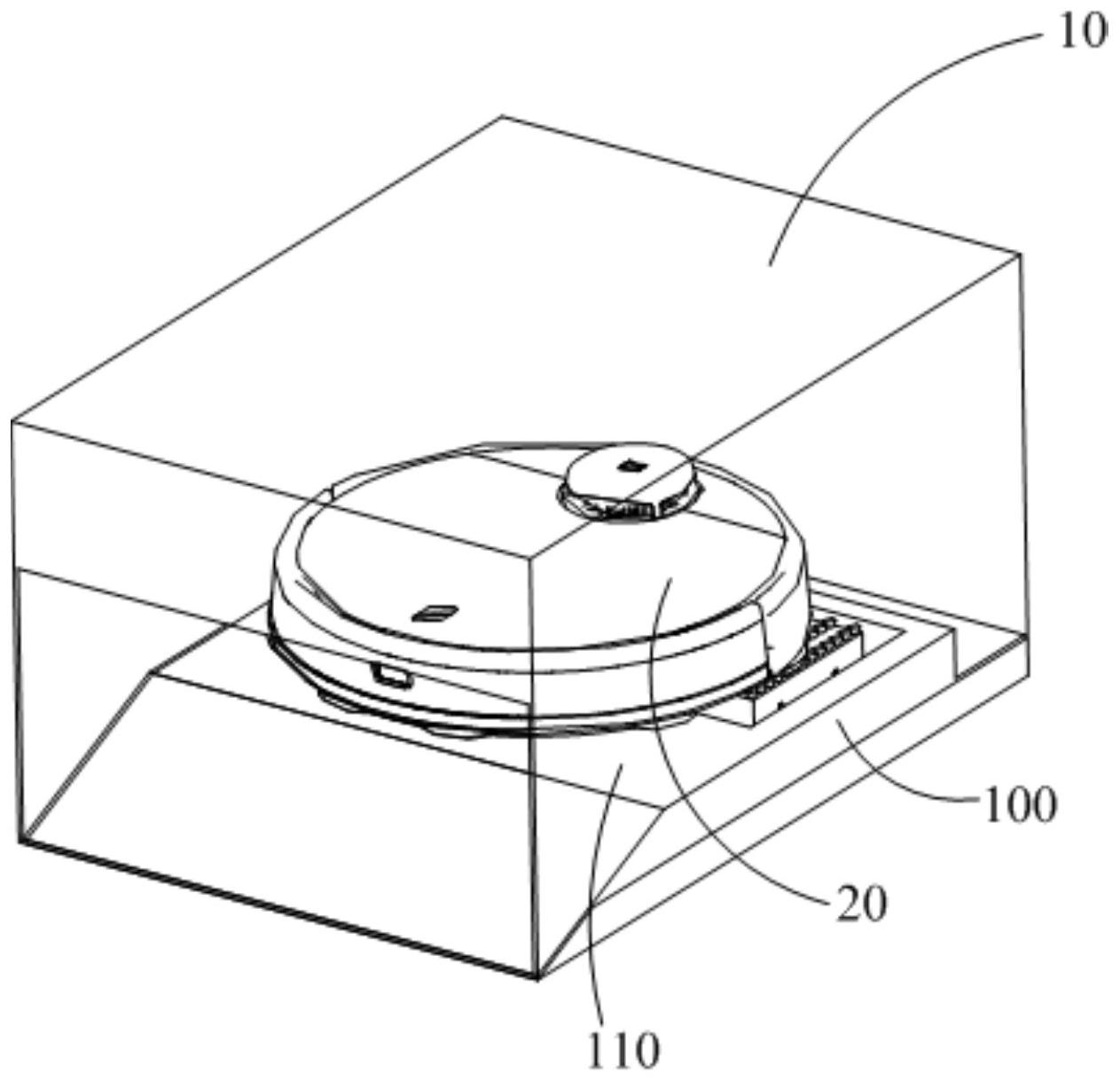
本发明的主要目的在于提供一种清洗装置,旨在实现清洗扫地机器人的拖布的功 能,减少用户自行更换扫地机器人的拖布的次数,并延长拖布的使用寿命。 为实现上述目的,本发明提出一种用于清洗扫地机器人的拖布,所述清洗装置包 括: 基座,设有供所述扫地机器人容纳的清洗位,所述清洗位上凹设有供所述扫地机 器人的拖布容置的清洁槽; 振动发生器,设有振动输出端,所述振动发生器安装于所述基座内;以及 清洗件,安装于所述清洁槽内,所述清洗件与所述振动输出端连接并用于在所述 振动发生器的驱动下对所述扫地机器人的拖布进行振动清洗。 在一实施例中,所述振动发生器为设有振动轴的振动马达,所述振动马达的振动 轴与所述清洗件通过连接件连接。 在一实施例中,所述振动马达为线性振动马达。 在一实施例中,所述清洗装置还包括控制单元,所述控制单元与所述振动马达连 接并用于控制所述振动马达的振动轴的转速及振动频率。 在一实施例中,所述清洗装置还包括驱动机构,所述驱动机构与所述清洗件驱动 连接并用于驱动所述清洗件在所述清洁槽内做沿水平方向和/或竖直方向的运动,以对所 述扫地机器人的拖布进行振动清洗。 在一实施例中,所述清洁槽内设置有活动平台,所述振动发生器及所述清洗件均 设于所述活动平台上; 所述驱动机构包括设有驱动轴的驱动马达及与所述驱动马达的驱动轴连接的连 接轴,所述连接轴与所述活动平台的连接,并在所述驱动马达的驱动下带动所述清洗件做 3 CN 111568325 A 说 明 书 2/5 页 沿水平方向和/或竖直方向的运动。 在一实施例中,所述活动平台两侧设有相对的滑动端,所述清洁槽两侧的内壁开 设有供所述活动平台的滑动端容置的滑动槽,所述滑动槽的大小与所述活动平台的滑动端 的大小相适配,以使所述清洗件在所述驱动机构的驱动下在所述清洁槽内做沿水平方向或 竖直方向的运动。 在一实施例中,所述清洗装置还包括水箱组件,所述水箱组件包括清洁液供给箱 及污水回收箱,所述清洁槽内开设有进液口及出液口,所述清洁液供给箱与所述进液口连 通并用于提供清洁液至所述清洁槽内,所述污水回收箱与所述出液口连通并用于回收所述 清洁槽内的污水。 在一实施例中,所述进液口处安装有喷嘴,所述喷嘴用于将所述清洁液供给箱内 的清洁液喷洒至所述清洁槽内。 在一实施例中,所述出液口处设有过滤网。 在本发明的技术方案中,由于该清洗装置包括基座、振动发生器及清洗件,其中, 基座设有供扫地机器人容纳的清洗位,清洗位上凹设有供扫地机器人的拖布容置的清洁 槽,振动发生器设有振动输出端,振动发生器安装于基座内,清洗件安装于清洁槽内,清洗 件与振动输出端连接并用于在振动发生器的驱动下对扫地机器人的拖布进行振动/刮擦清 洗,实现了清洗扫地机器人的拖布的功能,减少了用户自行更换扫地机器人的拖布的次数, 并延长了拖布的使用寿命。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图示出的结构获得其他的附图。 图1为本发明清洗装置及扫地机器人一实施例的结构示意图; 图2为本发明清洗装置及扫地机器人一实施例的侧面透视图; 图3为本发明清洗装置及扫地机器人一实施例的剖视图; 图4为本发明清洗装置一实施例的爆炸图。 附图标号说明: 标号 名称 标号 名称 10 清洗装置 110 清洗位 20 扫地机器人 111 清洁槽 100 基座 211 振动轴 200 振动发生器 212 连接件 300 清洗件 400 外壳 本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。











