
技术摘要:
提供安全性高的农业用药剂播撒无人机。具备冗余化的高度测量传感器和速度测量传感器,通过飞行控制器进行控制以使机体不超过限制高度以及限制速度。传感器优选并用多个方式。尤其是,优选起飞时的高度通过GPS进行测量,药剂播撒中的高度通过声纳进行测量。也可以随时测 全部
背景技术:
一般被称为无人机的小型无人直升机(多旋翼直升机)的应用正在推进。作为其重 要的应用领域之一,可列举向农田(农场)进行农药或液肥等的药剂播撒(例如,专利文献 1)。与欧美相比,在农田狭小的日本,适合使用无人机而不是有人的飞机或直升机的情况较 多。 通过准天顶卫星系统或RTK-GPS(Real Time Kinematic-Global Positioning System)等技术,使无人机在飞行中能够以厘米单位准确地得知本机的绝对位置,由此,在 日本,即使在典型的狭小复杂的地形的农田中,也使得人手进行的操纵为最小限度而能够 自主地飞行,并高效且准确地进行药剂播撒。 另一方面,对于面向农业用的药剂播撒的自主飞行型无人机而言,存在很难说对 安全性的考虑充分的情况。由于搭载有药剂的无人机的重量为几十公斤,因此在落到人身 上等事故发生的情况下,可能会导致严重的结果。另外,通常,由于无人机的操作者不是专 业人员,因此需要防止误操作的机制,但对此的考虑也不充分。迄今为止,虽然存在以人的 操纵为前提的无人机的安全性技术(例如,专利文献2),但不存在用于应对尤其是面向农业 用的药剂播撒的自主飞行型无人机特有的安全性课题的技术。 现有技术文献 专利文献 专利文献1:专利公开公报日本特开2001-120151 专利文献2:专利公开公报日本特开2017-163265
技术实现要素:
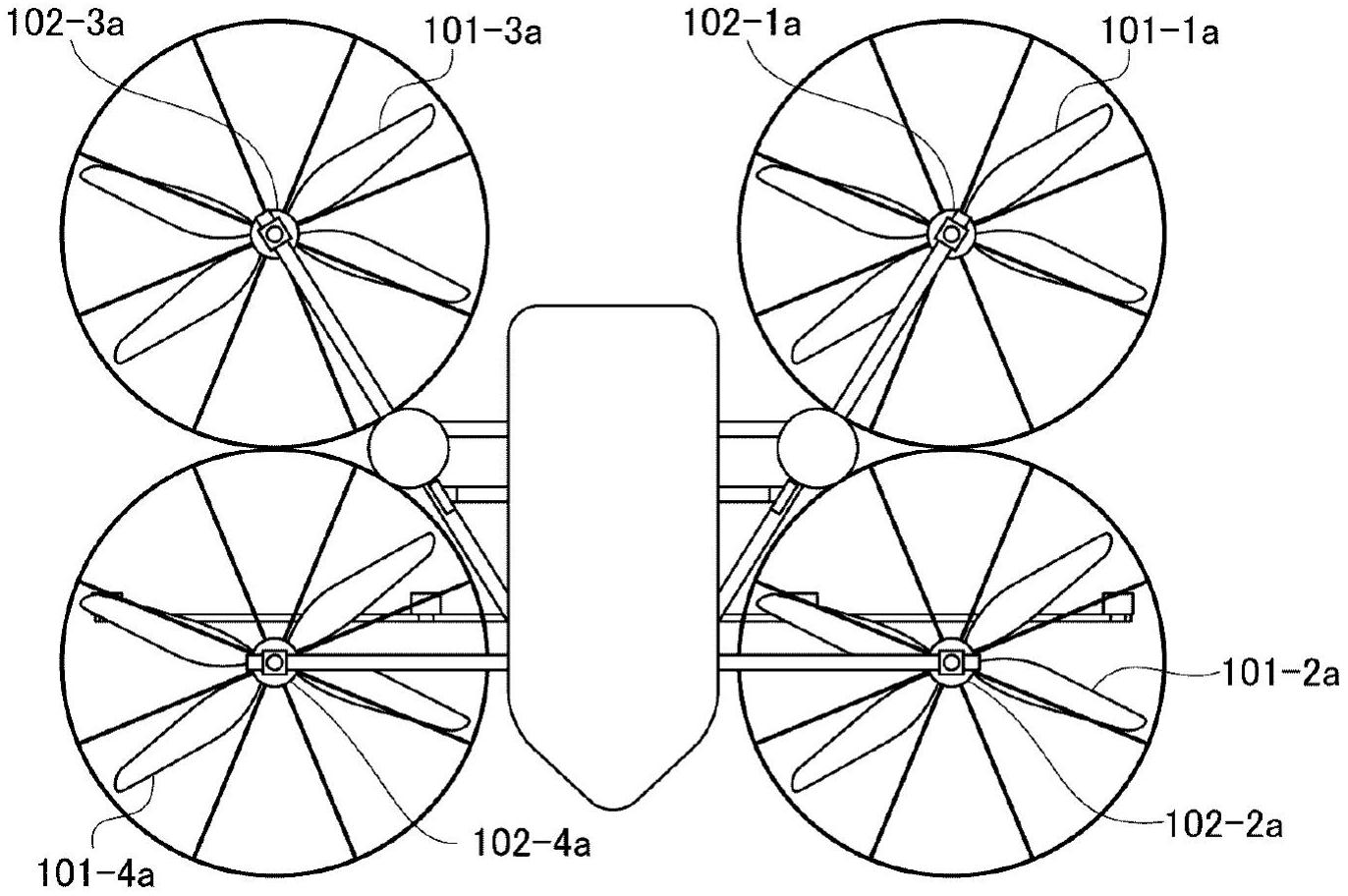
发明所要解决的课题 提供即使在自主飞行时也能够维持高安全性的农业用无人机(无人飞行器)。 用于解决课题的技术方案 本发明提供如下的无人机,由此解决上述课题,该无人机具备高度测量单元和高 度调整单元,所述高度调整单元调整机体高度,以使所述高度测量单元测量出的所述机体 高度不超过给定的极限高度。 另外,本发明提供段落0007中记载的无人机,由此解决上述课题,所述高度测量单 元是从声纳、气压传感器、加速度传感器、激光、GPS中选择的两种以上的方式或者一种以上 的方式且被多重化。 另外,本发明提供段落0007或者段落0008中记载的无人机,由此解决上述课题,所 述高度测量单元在起飞时使用GPS测量机体高度,在农场上空移动的过程中使用声纳测量 6 CN 111556986 A 说 明 书 2/10 页 机体高度。 另外,本发明提供段落0009中记载的无人机,由此解决上述课题,在所述高度测量 单元正使用GPS测量机体高度时,所述高度调整单元调整所述机体高度,以使所述机体高度 不超过比所述给定的极限高度低的第二极限高度。 另外,本发明提供段落0007、段落0008、段落0009或者段落0010中记载的无人机, 由此解决上述课题,所述高度测量单元还测量机体的上升速度,所述高度调整单元调整所 述机体高度,以使所述上升速度不超过给定的极限上升速度。 另外,本发明提供段落0007、段落0008、段落0009、段落0010或者段落0011中记载 的无人机,由此解决上述课题,所述无人机还包括重量测量单元,所述高度调整单元根据所 述重量测量单元测量出的机体重量来调整所述给定的极限高度。 另外,本发明提供如下的无人机,由此解决上述课题,该无人机速度具备速度测量 单元和速度调整单元,所述速度调整单元调整机体速度,以使所述速度测量单元测量出的 机体速度不超过给定的极限速度。 另外,本发明提供段落0013中记载的无人机,由此解决上述课题,所述速度测量单 元是从加速度传感器、GPS多普勒或者GPS中选择的两种以上的方式且被多重化。 另外,本发明提供段落0013或者段落0014中记载的无人机,由此解决上述课题,所 述无人机还包括重量测量单元,所述速度测量单元根据所述重量测量单元测量出的机体重 量来调整所述给定的极限速度。 另外,本发明提供段落0012或者段落0015中记载的无人机,由此解决上述课题,所 述重量测量单元基于如下的一个以上的信息来测量所述机体重量:向电动机指示的目标转 速与通过加速度传感器测量出的加速度的关系;向电动机指示的目标转速与通过GPS坐标 测量出的加速度的关系;旋转翼的转速与通过加速度传感器测量出的加速度的关系;旋转 翼的转速与通过GPS坐标测量出的加速度的关系;等速水平飞行时的机体前倾角度;以及所 搭载的药剂的液量。 另外,本发明提供段落0007、段落0008、段落0009、段落0010、段落0011、段落0012、 段落0013、段落0014、段落0015或者段落0016中记载的无人机,由此解决上述课题,所述无 人机还包括机体控制单元,在给定时间以上无法利用GPS时,所述机体控制单元使机体维持 为悬停状态或者使机体着陆。 另外,本发明提供段落0007、段落0008、段落0009、段落0010、段落0011、段落0012、 段落0013、段落0014、段落0015、段落0016或者段落0017中记载的无人机,由此解决上述课 题,所述无人机具备多个GPS接收机,所述多个GPS接收机分别被控制为使用不同的GPS卫 星。 另外,本发明提供如下的无人机控制方法,由此解决上述课题,该无人机控制方法 机体包括:高度测量步骤,测量机体高度;以及高度调整步骤,调整机体高度,以使所述测量 出的机体高度不超过给定的极限高度。 另外,本发明提供段落0019中记载的无人机控制方法,由此解决上述课题,在所述 高度测量步骤中,使用从声纳、气压传感器、加速度传感器、激光、GPS中选择的两种以上的 方式测量机体高度。 另外,本发明提供段落0019或者段落0020中记载的无人机控制方法,由此解决上 7 CN 111556986 A 说 明 书 3/10 页 述课题,在所述高度测量步骤中,在起飞时使用GPS测量机体高度,在农场上空移动的过程 中使用声纳测量机体高度。 另外,本发明提供段落0021中记载的无人机控制方法,由此解决上述课题,在所述 高度测量步骤中正使用GPS测量机体高度时,在所述高度调整步骤中,调整所述机体高度, 以使所述机体高度不超过比所述给定的极限高度低的第二极限高度。 另外,本发明提供段落0019、段落0020、段落0021或者段落0022中记载的无人机控 制方法,由此解决上述课题,在所述高度测量步骤中,还测量机体的上升速度,在所述高度 调整步骤中,还调整所述机体高度,以使所述上升速度不超过给定的极限上升速度。 另外,本发明提供段落0019、段落0020、段落0021、段落0022或者段落0023中记载 的无人机控制方法,由此解决上述课题,所述无人机控制方法还包括测量机体的重量的重 量测量步骤,在所述高度调整步骤中,根据在所述重量测量步骤中测量出的机体重量来调 整所述给定的极限高度。 另外,本发明提供如下的无人机控制方法,由此解决上述课题,该无人机包括:速 度测量步骤,测量机体速度;以及速度调整步骤,调整机体速度,以使所述测量出的机体速 度不超过给定的极限速度。 另外,本发明提供段落0025中记载的无人机控制方法,由此解决上述课题,在所述 速度测量步骤中,使用从加速度传感器、GPS多普勒或者GPS中选择的两种以上的方式测量 机体高度。 另外,本发明提供段落0025或者段落0026中记载的无人机控制方法,由此解决上 述课题,所述无人机控制方法还包括重量测量步骤,在所述速度调整步骤中,根据测量出的 机体重量来调整所述给定的极限速度。 另外,本发明提供段落0024或者段落0027中记载的无人机控制方法,由此解决上 述课题,在所述重量测量步骤中,基于如下的一个以上的信息来测量所述机体重量:向电动 机指示的目标转速与通过加速度传感器测量出的加速度的关系;向电动机指示的目标转速 与通过GPS坐标测量出的加速度的关系;旋转翼的转速与通过加速度传感器测量出的加速 度的关系;旋转翼的转速与通过GPS坐标测量出的加速度的关系;等速水平飞行时的机体前 倾角度;以及所搭载的药剂的液量。 另外,本发明提供段落0019、段落0020、段落0021、段落0022、段落0023、段落0024、 段落0025、段落0026、段落0027或者段落0028中记载的无人机控制方法,由此解决上述课 题,所述无人机控制方法还包括在给定时间以上无法利用GPS时使机体维持为悬停状态或 者使机体着陆的步骤。 另外,本发明提供段落0019、段落0020、段落0021、段落0022、段落0023、段落0024、 段落0025、段落0026、段落0027、段落0028或者段落0029中记载的无人机控制方法,由此解 决上述课题,所述无人机控制方法还包括控制为使多个GPS接收机分别使用不同的GPS卫星 的步骤。 另外,本发明提供如下的无人机控制程序,由此解决上述课题,该无人机控制程序 使计算机执行如下命令:高度测量命令,测量机体高度;以及高度调整命令,调整机体高度, 以使所述测量出的机体高度不超过给定的极限高度。 另外,本发明提供段落0031中记载的无人机控制程序,由此解决上述课题,所述高 8 CN 111556986 A 说 明 书 4/10 页 度测量命令包括使用从声纳、气压传感器、加速度传感器、激光、GPS中选择的两种以上的方 式测量机体高度的命令。 另外,本发明提供段落0031或者段落0032中记载的无人机控制程序,由此解决上 述课题,所述高度测量命令包括如下命令:在起飞时使用GPS测量机体高度,在农场上空移 动的过程中使用声纳测量机体高度。 另外,本发明提供段落0033中记载的无人机控制程序,由此解决上述课题,所述高 度测量命令包括如下命令:在正使用GPS测量机体高度时,调整所述机体高度,以使所述机 体高度不超过比所述给定的极限高度低的第二极限高度。 另外,本发明提供段落0031、段落0032、段落0033或者段落0034中记载的无人机控 制程序,由此解决上述课题,所述高度测量命令还包括测量机体的上升速度的命令,在所述 高度调整命令中,还包括命令:调整所述机体高度,以使所述上升速度不超过给定的极限上 升速度。 另外,本发明提供段落0031、段落0032、段落0033、段落0034或者段落0035中记载 的无人机控制程序,由此解决上述课题,所述无人机控制程序还使计算机执行测量机体重 量的重力测量命令,所述高度调整命令包括根据所述测量出的机体重量来调整所述给定的 极限高度的命令。 另外,本发明提供如下的无人机控制程序,由此解决上述课题,该无人机控制程序 使计算机执行如下命令:速度测量命令,测量机体速度;以及速度调整命令,调整机体速度, 以使所述测量出的机体速度不超过给定的极限速度。 另外,本发明提供段落0037中记载的无人机控制程序,由此解决上述课题,所述速 度测量命令使用从加速度传感器、GPS多普勒或者GPS中选择的两种以上的方式测量机体高 度。 另外,本发明提供段落0037或者段落0038中记载的无人机控制程序,由此解决上 述课题,所述无人机控制程序还使计算机执行测量机体重量的重量测量命令,所述速度调 整命令包括根据所述测量出的机体重量来调整所述给定的极限速度的命令。 另外,本发明提供段落0036或者段落0039中记载的无人机控制程序,由此解决上 述课题,所述重量测量命令基于如下一个以上的信息来测量所述机体重量:向电动机指示 的目标转速与通过加速度传感器测量出的加速度的关系;向电动机指示的目标转速与通过 GPS坐标测量出的加速度的关系;旋转翼的转速与通过加速度传感器测量出的加速度的关 系;旋转翼的转速与通过GPS坐标测量出的加速度的关系;等速水平飞行时的机体前倾角 度;以及所搭载的药剂的液量。此外,在上述无人机、无人机控制方法、无人机控制程序中, 在超过给定时间以上无法接收GPS电波的情况下,优选将机体置于悬停状态。 另外,本发明提供段落0031、段落0032、段落0033、段落0034、段落0035、段落0036、 段落0037、段落0038、段落0039或者段落0040中记载的无人机控制程序,由此解决上述课 题,所述无人机控制程序还使计算机执行如下命令:在给定时间以上无法利用GPS时,使机 体维持为悬停状态或者使机体着陆。 另外,本发明提供段落0031、段落0032、段落0033、段落0034、段落0035、段落0036、 段落0037、段落0038、段落0039、段落0040或者段落0041中记载的无人机控制程序,由此解 决上述课题,所述无人机控制程序还包括控制为使多个GPS接收机分别使用不同的GPS卫星 9 CN 111556986 A 说 明 书 5/10 页 的步骤。 此外,计算机程序能够通过经由互联网等网络的下载进行提供或记录在CD-ROM等的计 算机可读取的各种记录介质中进行提供。 发明效果 提供即使在自主飞行时也能够维持高安全性的农业用无人机(无人飞行器)。 附图说明 图1是本发明所涉及的药剂播撒用无人机的实施例的俯视图。 图2是本发明所涉及的药剂播撒用无人机的实施例的主视图。 图3是本发明所涉及的药剂播撒用无人机的实施例的右侧视图。 图4是使用本发明所涉及的药剂播撒用无人机的实施例的药剂播撒系统的整体概念图 的示例。 图5是表示本发明所涉及的药剂播撒用无人机的实施例的控制功能的示意图。











