
技术摘要:
本发明涉及机器人领域,具体涉及一种绣球抛掷机器人,包括底盘模块、装载模块、抛掷模块、电控模块、球架和绣球,所述底盘模块包括底盘框架和四个动力机构,所述装载模块包括装载平台、平移气缸、装载定位锥和锁舌,所述抛掷模块包括抛掷架、抛掷臂、夹具等,所述球架 全部
背景技术:
我国广西壮族人民的一项传统体育游戏“抛绣球”。这种游戏历史悠久,最早出现 于 2000年前绘制的花山壁画上,但当时是用青铜铸制的兵器,用于甩投,称为“飞砣”,多在 作战和狩猎中应用。后来人们将飞砣改制成绣花囊,互相抛接娱乐。到了宋代,逐渐演变成 为壮族男女青年表达爱情的媒介。现“抛绣球”仍在广西百色、柳州、南宁、河池等地区流传。 随着当今智能化时代的飞速发展,机器人已经开始有逐渐应用到我们的日常体育 娱乐和比赛活动的趋势,现在已经有了羽毛球机器人、篮球机器人、足球机器人,但是却还 没有专门用于在体育娱乐活动等场合的绣球抛掷机器人,活动中仍然使用手工抛掷。 本发明设计了一台完整的绣球夹取与抛掷机器人,旨在应用于绣球等类型娱乐活 动或者比赛中,高速高精度地实现抛掷绣球。
技术实现要素:
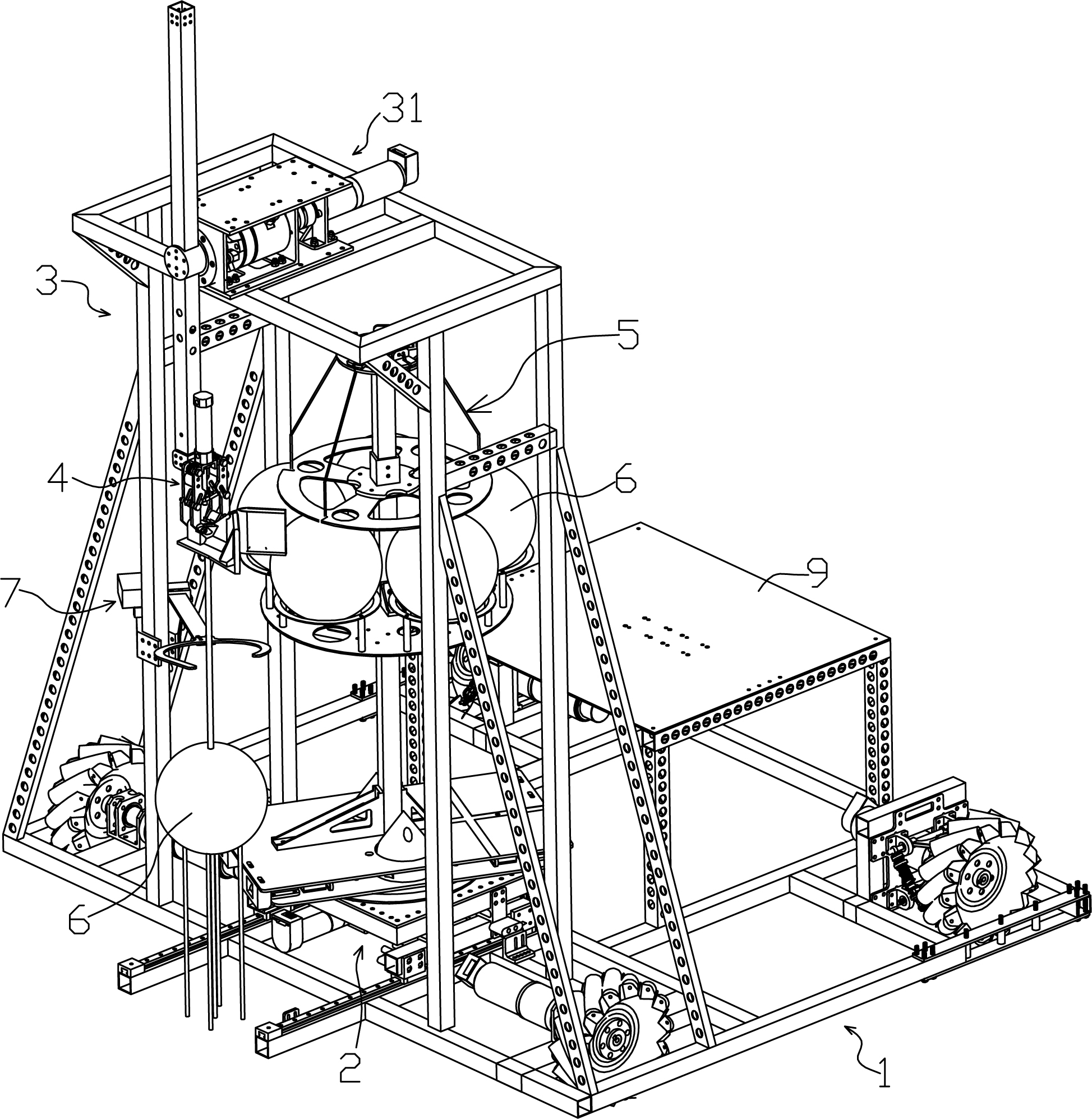
本发明的目的是针对现有技术不足,设计一种旋转抛掷绣球的机器人,能够自动 夹取和抛掷绣球等种类球体,以在响应娱乐活动或比赛中自动高速高精度的进行所用球体 的抛掷。 为实现上述目的,本发明采用的技术方案是: 本发明公开了一种旋转抛掷绣球的机器人,包括底盘模块、装载模块、抛掷模块、球架 和绣球;所述底盘模块包括底盘框架和用于驱动底盘框架移动的动力机构,所述底盘框架 左侧设有两根用于连接所述装载模块的铝方管;所述装载模块包括平移机构和装载定位机 构,所述平移机构包括固定于所述铝方管上的滑轨、与滑轨配合滑动的滑块以及平移气缸, 所述平移气缸的底部固定于所述底盘框架上,其活塞杆末端与所述滑块的侧壁相连;两侧 所述滑块的顶部设有与之连接的固定板,所述固定板顶部设有电动转盘,所述电动转盘的 轴心与所述固定板底部的电机输出端相连;所述装载定位机构设置于所述电动转盘的顶部 用于与所述球架的底部定位连接;所述球架包括球架顶层、球架中层、球架底层以及球架 杆,所述球架底层固定于所述装载定位机构的顶部,所述球架杆的底部固定于所述球架底 层的上表面中部,所述球架中层固定于所述球架杆的中部用于放置所述绣球,所述球架顶 层固定于所述球架杆的顶部;所述抛掷模块包括旋转机构、抛掷架,所述抛掷架固定于所述 底盘框架的上方,所述旋转机构包括旋转电机、抛掷臂,所述旋转电机固定于所述抛掷架的 顶部,所述抛掷臂的上端固定于旋转电机的输出端,另一端连接有夹具;所述绣球与系绳的 一端连接,所述系绳的另一端形成猴拳结,所述猴拳结挂接于所述球架顶层的固定卡口上。 还包括电控模块,所述电控模块包括单片机、电路驱动板、码盘以及摄像头,所述 摄像头设置于遮光板底部,所述遮光板通过其底部的四个支撑柱固定于所述底盘框架上, 所述码盘安装于所述底盘框架上。 4 CN 111730613 A 说 明 书 2/6 页 所述装载定位机构包括锁舌、装载平台、定位锥以及手动拨片,所述装载平台固定 于所述电动转盘的顶部,所述定位锥呈锥形结构固定于所述装载平台的中部两侧,所述装 载平台的上表面的两端固定有用于锁舌穿过的锁舌座,所述手动拨片固定于所述锁舌的内 端;所述球架底层的下表面两端设有球架固定脚,所述固定脚呈方形结构,其侧壁上设有用 于所述锁舌插入的锁舌孔,所述球架底层的中部两侧设有用于所述定位锥插入的定位孔。 所述动力机构包括悬挂动力机构和非悬挂动力机构,所述悬挂动力机构包括驱动 电机、减震器、传动轴、电机支座以及麦克纳姆轮,所述电机支座安装于底盘框架上,其内设 有驱动电机,所述驱动电机的输出轴通过传动轴与麦克纳姆轮连接。 所述夹具包括夹具气缸、固定座,所述固定座后壁固定于所述抛掷臂的底端,所述 夹具气缸固定于所述固定座的顶部,其活塞杆的端部穿过所述固定座的顶部与连接板相 连;所述固定座的两侧设有与之铰接的夹臂,所述夹臂的前壁中部设有用于销轴滑动的滑 孔,所述滑孔呈倾斜设置,所述销轴的中部与所述连接板的两端铰接;两侧所述夹臂的夹紧 时,其中部形成用于夹持系绳的漏斗状夹持孔。 所述夹臂的底部前端设有导向片,两侧所述夹臂的夹紧时,两个所述导向片组合 成用于系绳导入的“八”字形的系绳入口。 所述抛掷架上设有快速稳球机构,所述快速稳球机构包括稳球底座、稳球电机、稳 球臂以及稳球环,所述稳球底座的一端固定于所述抛掷架上,所述稳球电机固定于所述稳 球底座上,其输出轴与所述稳球臂的一端连接,所述稳球臂的另一端与所述稳球环相连,所 述稳球环呈一侧开口的环形结构,其开口的方向与所述系绳入口的方向相同。 所述稳球电机通过转动支架固定于所述稳球底座上,所述转动支架呈方形结构, 所述稳球电机固定于其后壁上,其侧壁上设有用于所述稳球电机输出轴穿过的通孔,所述 转动支架的前端和后段设有与之一体成型的连接管,前端的所述连接管通过第二销轴与所 述稳球底座铰接,后端的所述连接管用于固定螺栓穿过,底部设有与固定螺栓匹配的螺母; 所述稳球底座的后端设有用于所述固定螺栓滑动的弧形滑槽。 所述球架中层的上表面以球架杆为中心呈环形阵列有若干用于放置绣球的支撑 架,所述支撑架呈环形结构,其底部设有与所述球架中层上表面相连的支撑脚,所述支撑架 的内径小于所述绣球的外径。 所述绣球与系绳连接处采用弹道尼龙双股牛津布进行加固,内部由泡沫球填充, 球体表层裹布内侧位于球底处缝上特制的扁平沙包,形成一个不倒翁构型,所述绣球四周 与底部各有一束三股的彩色飘带。 与现有技术相比,本发明的有益效果是: 本发明通过电机与气缸提供动力,再利用滑轨导向和定位,抛掷臂的竖直悬停,实现绣 球夹取,同时运用电机、气缸及旋转机构实现抛掷。设计的机器人,能够高速高精度地实现 自动夹取和抛掷附带绣球或者类似球类。 附图说明 图1为本发明的结构示意图; 图2为本发明去掉了气瓶后的侧视图; 图3为图2沿着A-A的部分剖面图; 5 CN 111730613 A 说 明 书 3/6 页 图4为本发明中旋转机构的结构示意图; 图5为本发明中底盘模块的结构示意图 图6为本发明中装载模块的结构示意图; 图7为本发明中球架的结构示意图; 图8为本发明中夹具的结构示意图; 图9为本发明中稳球机构的分解示意图。 其中:1底盘模块,11底盘框架,12悬挂动力机构,121驱动电机,122减震器,123传 动轴,124电机支座,125麦克纳姆轮,13非悬挂动力机构,14铝方管,2装载模块,21平移机 构,211平移气缸,212滑块,213滑轨,22装载定位机构,221锁舌,222装载平台,223定位锥, 224手动拨片,225锁舌座,23电机,24固定板,25电动转盘,3抛掷模块,31旋转机构,311电 机,312气路旋转接头,313交叉滚子轴承,314抛掷臂,32抛掷架,4夹具,41夹具气缸,42固定 座,43连接板,44夹臂,45销轴,46滑孔,47导向片,48漏斗状夹持孔,5球架,51球架顶层,52 球架中层,53球架底层,54球架固定脚,55球架杆,56定位孔,6绣球,61系绳,62猴拳结,7快 速稳球机构,71稳球底座,72稳球电机,73稳球臂,74稳球环,75转动支架,76连接管,77弧形 滑槽,8码盘,9摄像头遮光板,10防护框。











