
技术摘要:
本发明属于康复医疗设备技术领域,具体涉及一种八自由度上肢康复训练臂及装置,训练臂包括肩胛骨运动组件、肩关节组件、肘关节组件、腕关节组件、大臂组件以及小臂组件;肩胛骨运动组件包括:肩胛骨第一支架、肩抬升下降电机、肩抬升下降支架以及肩前探后移电机;胸锁 全部
背景技术:
上肢康复训练装置用于配合或者替代传统的康复医疗师对患者进行康复训练,由 于康复训练主要是循环重复性动作,康复训练装置可持续性长,使得康复训练更为有效。 上肢康复机器人可以分为两大类,一类为末端牵引式康复机器人系统,另一类为 外骨骼式康复机器人系统。末端牵引式康复机器人系统通过机器人运动带动患者上肢运动 来达到康复训练目的的机械系统,机器人系统与患者相对独立,仅通过患者手部与机器人 末端相连,其结构简单、易于控制,价格低廉。使用末端牵引式康复机器人对于整个手臂是 合适的,但是不能很好地对于肩胛骨、肩、肘、腕等关节进行针对性训练,训练功能无法达到 要求。外骨骼因为与人体上肢运动相似,可以更好的辅助患者进行康复训练,但其结构设计 及控制方法具有一定的难度。现有外骨骼机器人一般采用刚性材料,自由度一般比较少,为 了更精确的带动肢体进行训练,往往需要将人的肢体的相应关节部位与机器人绑定,肢体 跟着机器人做随动。导致患者接触冰冷的机器容易给患者造成心理上的不适感,降低康复 训练效果。
技术实现要素:
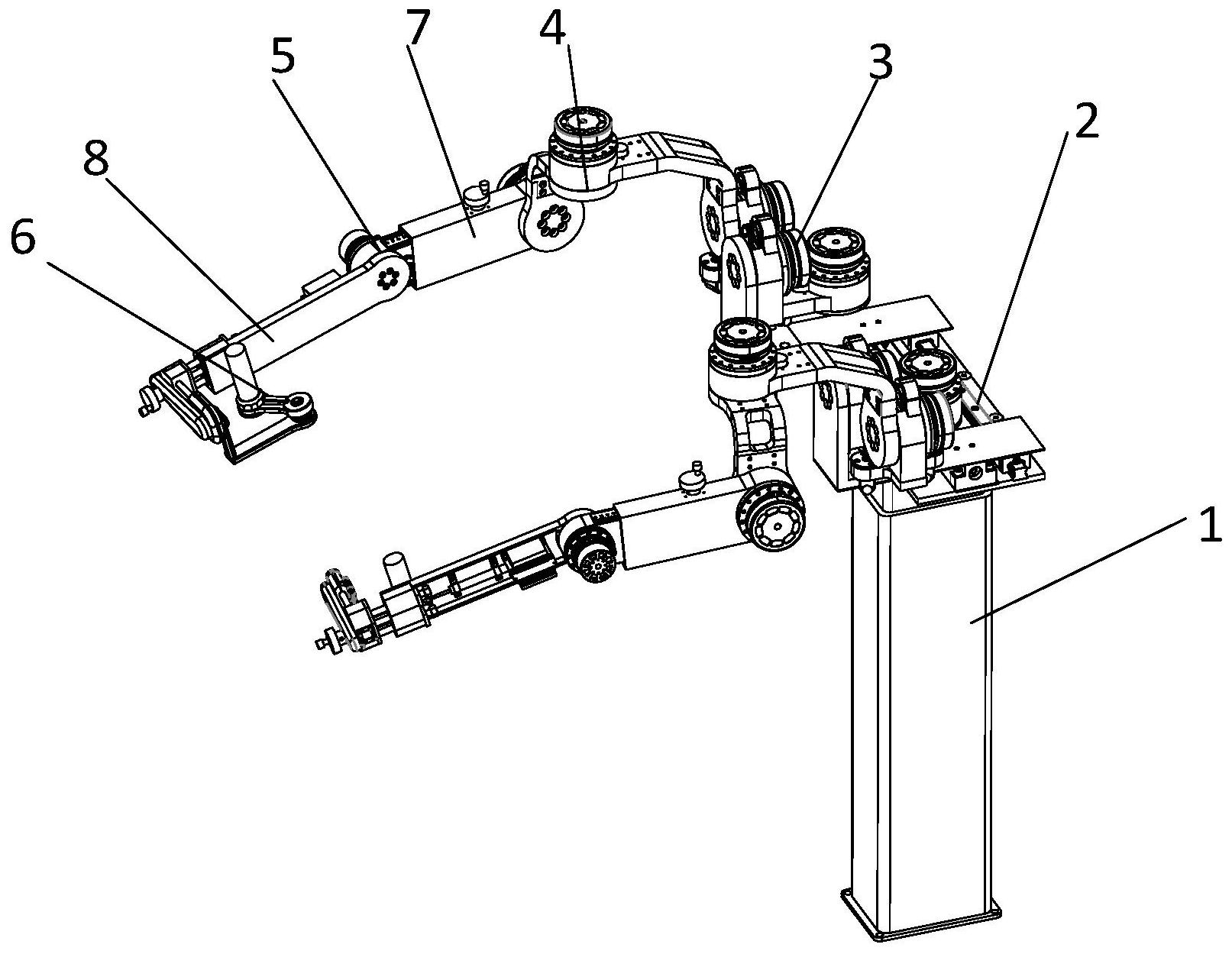
本发明的目的是克服现有技术中存在的上肢康复训练装置自由度上,不能对肩胛 骨、肩、肘和腕关节等进行针对性的训练的缺陷,提供一种柔性的能够充分模拟人体上肢 的、工作范围大、康复训练高的八自由度上肢康复训练臂和装置。 本发明解决其技术问题所采用的技术方案是: 一种八自由度上肢康复训练臂,其特征在于:包括肩胛骨运动组件、与肩胛骨运动 组件通过胸锁关节锁骨连杆连接的肩关节组件、肘关节组件、腕关节组件、连接所述肩关节 组件和所述肘关节组件的大臂组件以及连接所述肘关节组件和所述腕关节组件的小臂组 件;所述肩胛骨运动组件包括:肩胛骨第一支架、安装在所述肩胛骨第一支架上的肩抬升下 降电机、与所述肩抬升下降电机的输出轴连接的肩抬升下降支架以及安装在所述肩胛骨第 一支架上的肩前探后移电机;所述胸锁关节锁骨连杆的一端与所述肩前探后移电机的输出 轴固定连接,另一端连接所述肩关节组件;所述肩抬升下降电机的转动轴线为水平方向,所 述肩前探后移电机的转动轴线与所述肩抬升下降电机的转动轴线垂直;所述肩关节组件包 括通过架体安装在所述胸锁关节锁骨连杆上的X向肩关节电机、一端与所述X向肩关节电机 的输出轴固定连接的第一直角架、安装在所述第一直角架另一端的Z向肩关节电机、一端与 所述Z向肩关节电机的输出轴固定连接的第二直角架、安装在所述第一直角架另一端的Y向 肩关节电机。 进一步地,所述肩抬升下降电机安装在肩胛骨第一支架上且其输出轴固定连接手 4 CN 111588591 A 说 明 书 2/6 页 臂安装板;所述训练臂具有两条相互平行的所述胸锁关节锁骨连杆;一条所述胸锁关节锁 骨连杆的一端连接所述肩前探后移电机的输出轴,另一端固定连接肩胛骨第二支架;另一 条所述胸锁关节锁骨连杆的一端与所述肩胛骨第一支架转动连接,另一端转动连接肩胛骨 第二支架;所述X向肩关节电机安装在所述肩胛骨第二支架上。 进一步地,所述大臂组件包括连接在所述Y向肩关节电机输出轴上的大臂上支架、 固定安装在所述大臂上支架上的U型安装块、通过轴承转动安装在所述U型安装块或者大臂 上支架上的主动锥齿轮、与所述主动锥齿轮啮合的从动锥齿轮、作为所述从动锥齿轮的转 轴的大臂调节丝杆、螺旋套设在所述大臂调节丝杆上的大臂调节螺母、固定连接在所述大 臂调节螺母上且与所述大臂上支架滑动连接的大臂下支架,所述主动锥齿轮的转轴从所述 大臂上支架端连接有大臂调节旋转手柄。 进一步地,所述大臂组件还包括两端分别安装在所述大臂上支架和大臂下支架上 的直线位移传感器;所述大臂下支架部分滑动安装在所述大臂上支架内,所述大臂下支架 的外表面还具有用来观察大臂伸长长度的刻度尺。 进一步地,所述小臂组件包括小臂上支架、滑动连接在所述小臂上支架上的小臂 调长座、小臂调长固定架、通过轴承安装在所述小臂调长固定架上的小臂调长丝杠以及固 定在所述小臂调长固定架上且与所述小臂调长丝杠平行设置的导向光轴;所述小臂调长座 通过直线轴承与所述导向光轴滑动连接。 进一步地,所述小臂组件还包括小臂旋转机构,所述小臂旋转机构包括:安装在所 述小臂调长座上的小臂旋转电机、与所述小臂旋转电机的输出轴同轴安装的小臂旋转主动 带轮、与所述小臂旋转主动带轮通过同步带连接的小臂旋转从动带轮以及与所述小臂旋转 从动带轮的转轴固定连接的腕关节旋转连臂。 进一步地,所述腕关节组件包括固定安装在所述腕关节旋转连臂上的腕关节从动 带轮、腕关节驱动电机、与所述腕关节驱动电机的输出轴同轴连接的腕关节主动带轮;所述 腕关节主动带轮和所述腕关节从动带轮通过同步带连接,所述腕关节主动带轮和腕关节从 动带轮均通过轴承分别转动安装在带轮安装连杆的两端。 进一步地,所述肘关节组件包括:安装在所述大臂下支架上的肘关节电机,所述肘 关节电机的输出轴与所述小臂上支架同轴连接。 一种八自由度上肢康复训练装置,其特征在于:包括两个对称设置的如权利要求1 所述的上肢康复训练臂,所述上肢康复训练装置还包括升降机构和设置在升降机构输出端 的两臂间距调节机构,两个上肢康复训练臂对称安装在所述两臂间距调节机构上。 进一步地,所述两臂间距调节机构包括设置在所述升降机构的输出端的支撑板、 安装在所述支撑板中部的间距调节电机、与所述间距调节电机的输出轴同轴连接的间距调 节主动锥齿轮、对称设置在所述间距调节主动锥齿轮两侧且均与所述间距调节主动锥齿轮 啮合的两间距调节从动锥齿轮、作为所述间距调节从动锥齿轮的转轴的间距调节丝杠螺母 副、设置在所述支撑板上且与间距调节丝杠螺母副的丝杠平行的间距调节导轨以及滑动连 接在所述间距调节导轨上的间距调节滑块;所述间距调节滑块与所述间距调节丝杠螺母副 的螺母通过手臂安装板固定连接;所述肩抬升下降电机的输出轴连接肩抬升下降支架,肩 抬升下降支架安装在所述手臂安装板上。 本发明的一种八自由度上肢康复训练臂及装置的有益效果是: 5 CN 111588591 A 说 明 书 3/6 页 1、本发明能够帮助患者进行肩胛骨、肩、肘、腕关节的康复训练,该装置的肩锁关 节的长度、大臂长度、小臂长度以及手腕到小臂的距离可根据不同患者进行调节,可以满足 任意体型的患者进行康复训练,设计人性化。 2、本发明为上肢八自由度训练装置,相比较于市面上的上肢训练装置,具有工作 空间大、范围广的优点。肩前探后移电机、肩抬升下降电机与三个肩关节电机共同作用可以 帮助患者完成肩部的前探/后移、抬升/下降动作,对患者的上肢进行更彻底全面的康复训 练,提高训练效率。 3、本发明可一机多用,肩胛骨关节机构可作为一个独立的个人进行拆卸,安装肩 胛骨关节机构时为八自由度训练装置,拆卸时该装置为六自由度训练装置。这一设计可根 据患者不同康复时期的需要所改变,具有节约成本、提高利用率的优点。 附图说明 下面结合附图和











