
技术摘要:
本发明公开了一种无人车最大包络线控制方法,其由纵向控制器、横向控制器和横摆力矩控制器组成。纵向控制器的设计以无人车G‑G图为基础,通过对无人车驱动和制动系统的控制,使无人车在轨迹跟踪的过程中达到行驶速度极限;横向控制器对无人车的转向系统进行控制,消除 全部
背景技术:
自动驾驶车辆是未来汽车产业的重要发展方向,也是人工智能技术落地的重要领 域之一。无人车是指具有自主行为能力并完全省略人类驾驶机构的车辆,具有智能化、线控 化、机器人化、多功能化的特点。无人车的使用目的为替代人类执行作业任务,包括但不限 于打击、作战、巡逻、侦察、物流、运输、摆渡、配送、清扫等民用或军用任务,在民用或军用领 域具有非常广阔的应用前景,是未来智能交通与智慧城市建设的重要组成部分,更是我国 新一代陆军装备发展的重要依托。因此,无人车理论与技术的研究对我国国民经济发展与 国防安全建设具有重要战略意义。 由于特殊的使用功能,无人车完全省略人类操作机构,其底盘必须采用全线控架 构,即转向系统、驱动系统及制动系统完全由电子控制系统控制,实现完全的线控转向、线 控驱动及线控制动。在另一方面,为了提高无人车的操纵性、稳定性、机动性及可控性,无人 车多采用各车轮独立驱动及独立转向技术,使得各车轮的转向角及驱动力都独立可控,大 幅增加无人车的执行机构可控自由度,从而满足民用复杂场景或军用场景下的无人车使用 需求。 在某些特定使用场景尤其是军用场景下,需要充分发挥无人车的动力学性能,以 使无人车尽快通过给定路径并完成既定任务,但是,目前传统的无人车动力学控制系统并 不能满足充分发挥无人车动力学极限特性的需求,严重制约了高性能无人车在相关场景下 的广泛应用。
技术实现要素:
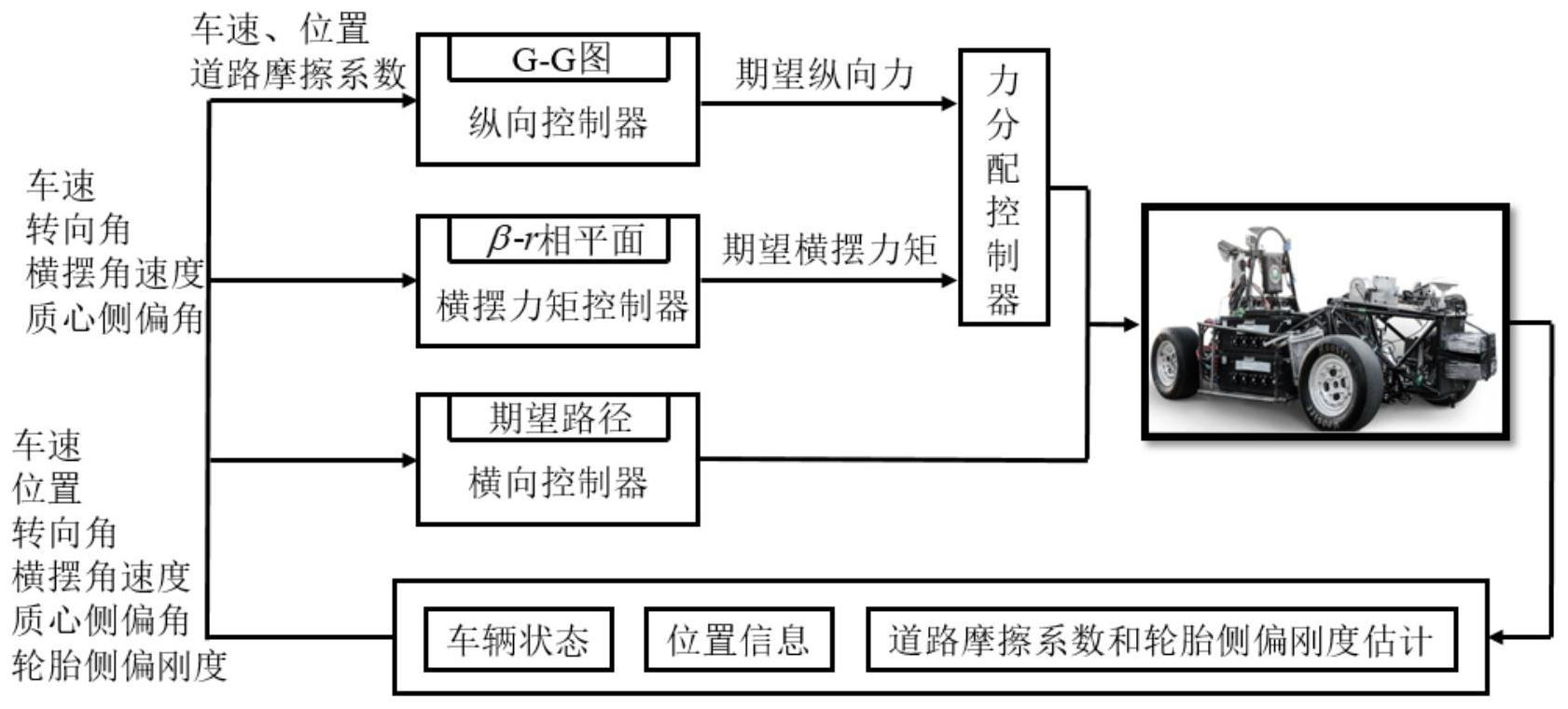
有鉴于此,本发明的目的是提供一种无人车最大包络线动力学控制方法,可以控 制无人车在行驶极限和操纵极限下沿预定路径行驶。 一种无人车最大包络线动力学控制方法,包括: 步骤1、通过计算机仿真获得无人车的G-G图,以掌握理想状态下的车辆动力学极 限特性; 步骤2、根据实际道路附着系数修正无人车的G-G图: 修正后的G-G图边界的描述为: 4 CN 111572558 A 说 明 书 2/5 页 式中:调节参数λ=μmax/μ0,μ0为试验台最大摩擦系数,μmax为最大路面摩擦系数, ax、ay分别为纵向和横向加速度,aymax为最大理想横向加速度,axmaxT、axmaxB分别为最大理想 加速度和最大理想减速度; 步骤3、设计纵向控制器: 根据修正后的G-G图边界和期望路径的曲率,得出给定路径上的预设速度;根据预 设速度可知期望速度和纵向加速度,进而根据牛顿第二定律计算得到理想的整车前馈纵向 力,设计前馈纵向控制器;根据预设速度的期望车速与实际速度反馈的误差设计纵向控制 器反馈控制器;最终将前馈纵向控制器和反馈控制器的总纵向力分配到无人车的每个独立 驱动电机上以调整转矩,从而实现无人车的纵向控制; 步骤4、设计横向控制器: 横向控制器中的前馈部分的转向角设计为: 式中:Ux为车速,r为横摆角速度,xp为控制器预瞄投影距离,β为质心侧偏角,κ为路 径曲率,s为行驶距离,且: 式中:lf、lr分别为车辆质心位置到前轴和后轴的距离,cf、cr分别为车辆前轮和后 轮的轮胎侧偏刚度,Iz为转动惯量; 横向控制器中的反馈部分的转向角设计为: 式中:K2、K3为反馈增益,ep为控制器预瞄投影误差,ΔΦ为偏航角误差。 则最终横向控制器的转向角的总值为δFFW δFB,从而实现无人车的转向角控制; 步骤5、设计横摆力矩控制器:根据以无人车横摆角速度和质心侧偏角作为变量的 β-r相位图确定的无人车稳定姿态极限,采用滑模控制器产生主动横摆力矩: M=Meq-(Kssat(S/φ) KpS) (5) 式中Meq为等效控制横摆力矩: 式中:sat为饱和函数,Φ为滑模控制中边界层厚度,S为滑动面,rsafe、βsafe分别为 车辆在稳定姿态下的横摆角速度和质心侧偏角,Ks、Kp为控制参数,δ为转向轮转角。 将所需的主动横摆力矩分配给各个独立驱动的电机,实现对无人车的横摆力矩控 制。 本发明具有如下有益效果: 本发明提出的无人车最大包络线控制方法,包括纵向、横向、横摆力矩控制三个子 控制器;纵向控制器对无人车的驱动和制动系统进行控制,使无人车在轨迹跟踪过程中达 到行驶极限;横向控制器对无人车的转向系统进行控制,消除无人车实际位置与给定路径 的误差;横摆力矩控制器通过两侧独立驱动电机所产生的主动横摆力矩纠正车辆姿态,保 5 CN 111572558 A 说 明 书 3/5 页 证无人车稳定性;纵向控制器依据G-G图设计,用G-G图的形式清晰明确的表示无人车所能 达到的行驶速度极限;横摆力矩控制器中,用β-r相平面的形式清晰明确的表示无人车所能 达到的稳定姿态极限,可以精确地确定无人车的安全姿态区域。 综上,针对采用全轮独立转向及独立驱动技术的无人车,本发明能在有效的控制 无人车跟踪期望路径的同时,使无人车工作在其行驶极限和操纵极限,从而提高无人车的 轨迹跟踪能力与机动能力,满足民用复杂场景或军用场景下无人车的使用需要。 附图说明 图1为本发明最大包络线控制方法的总体结构; 图2为G-G图示意图; 图3为试验测试中得到的G-G图; 图4为β-r相平面示意图; 图5为试验测试中得到的横向轨迹误差。











