
技术摘要:
本申请公开了一种量子计算机的控制方法、系统及相关组件,包括:对量子计算机进行初始化设置,并获取单个量子位的最佳控制信号;将量子计算应用程序指令和最佳控制信号输入量子位控制模型,得到对应的微波控制信号,以通过量子测控系统完成量子位的操作;量子位控制模 全部
背景技术:
近年来,量子计算技术发展迅速,几乎所有的基础问题已经在理论上得到了解决。 超导量子计算机的系统工作在超低温环境下,其核心是超导量子芯片,通过在微波频率上 施加脉冲波形来实现对量子位的操控,并且在微波电子器件的制作上可以利用现有的半导 体微加工工艺,成为目前比较可靠的实现量子计算的物理系统之一。 超导量子计算机的核心是量子芯片和量子测控系统,通过量子测控系统将设计好 的量子电路转换成相应的量子控制脉冲信号,模拟信号以电磁场的形式耦合到其中嵌入了 量子比特的物理基底,进而实现操控量子计算机运作。但在运作过程中,控制电子设备精密 仪器本身的缺陷产生的噪声、来自外部辐射的干扰、以及数字信号转模拟信号过程中产生 的控制误差,会影响量子计算的保真度,降低量子计算的性能。在这种情况下,如何产生更 加合理的控制信号,实现超导量子计算机环境下量子计算应用程序的高效准确执行成为亟 需解决的问题。
技术实现要素:
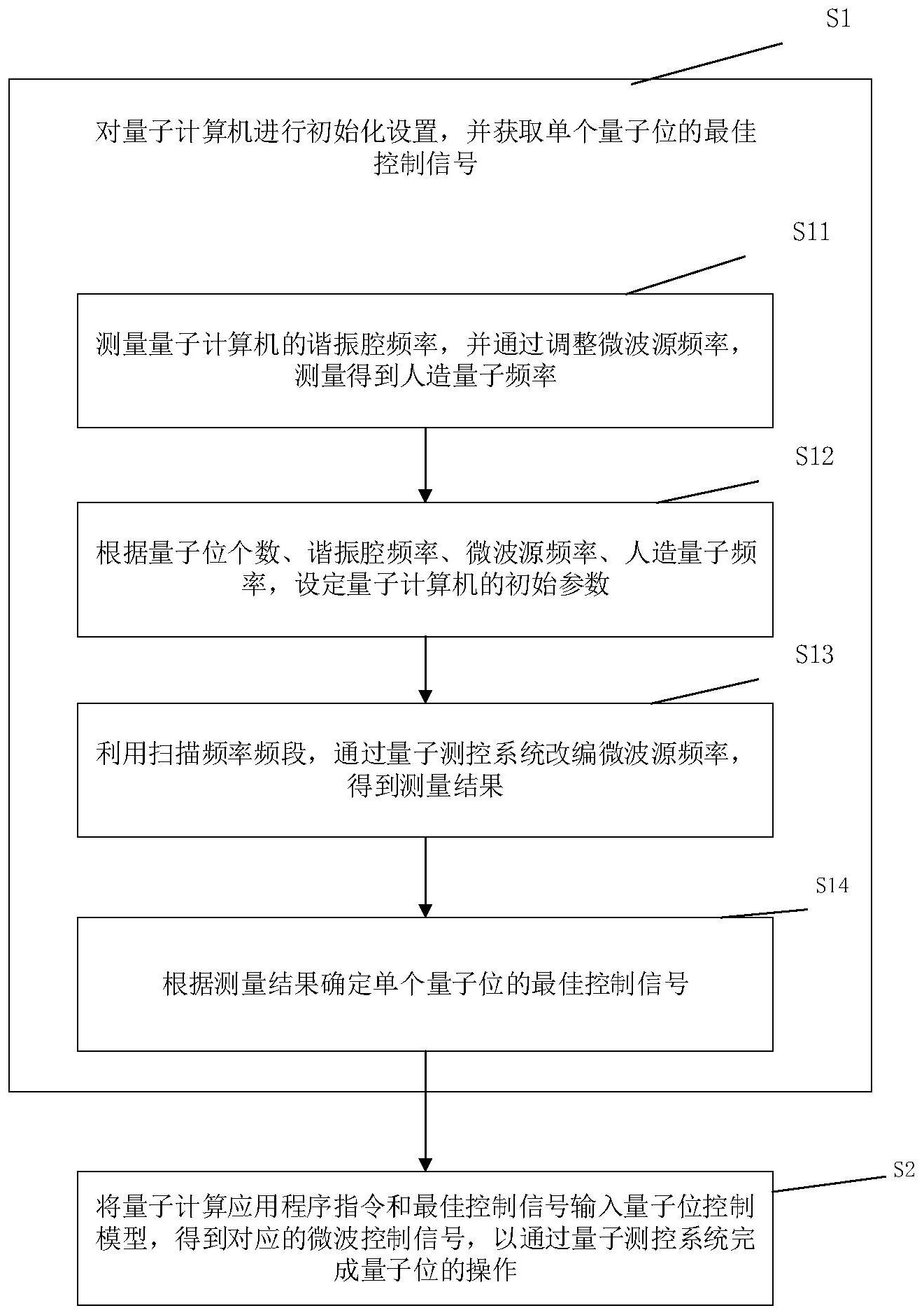
有鉴于此,本发明的目的在于提供一种准确高效的量子计算机的控制方法、系统 及相关组件。其具体方案如下: 一种量子计算机的控制方法,包括: 对量子计算机进行初始化设置,并获取单个量子位的最佳控制信号; 将量子计算应用程序指令和所述最佳控制信号输入量子位控制模型,得到对应的 微波控制信号,以通过量子测控系统完成量子位的操作; 所述量子位控制模型具体为根据量子位布局、量子位个数、量子退相干时间和量 子位操作时序确定结构,并通过所述量子计算机的初始训练数据进行训练优化得到的神经 网络模型; 所述初始训练数据为无所述量子位控制模型时,所述量子计算机在所述量子计算 应用程序指令下的初始控制信号和对应的初始测量数据。 优选的,所述量子位控制模型包括: 根据所述初始训练数据学习不同量子位之间的关联关系、并生成量子位关系矩阵 的量子位关系生成器; 根据所述量子计算应用程序指令、所述最佳控制信号和所述量子位关系矩阵,生 成微波控制信号的量子位控制生成器。 优选的,所述量子位控制生成器具体包括门控循环单元网络和注意力机制。 优选的,所述量子位控制模型具体为: 4 CN 111612151 A 说 明 书 2/5 页 利用梯度下降优化法,通过所述量子计算机的初始训练数据进行训练优化得到的 神经网络模型。 优选的,所述对量子计算机进行初始化设置,并获取单个量子位的最佳控制信号 的过程,具体包括: 测量量子计算机的谐振腔频率,并通过调整微波源频率,测量得到人造量子频率; 根据量子位个数、所述谐振腔频率、所述微波源频率、所述人造量子频率,设定所 述量子计算机的初始参数; 利用扫描频率频段,通过量子测控系统改编微波源频率,得到测量结果; 根据所述测量结果确定单个量子位的最佳控制信号。 优选的,所述控制方法还包括: 循环执行优化所述量子位控制模型的步骤,直至循环次数达到预设数值; 所述优化所述量子位控制模型的步骤包括: 获取所述微波控制信号对应的第二测量数据; 将所述微波控制信号和所述第二测量数据作为第二训练数据,对所述量子位控制 模型进行训练优化。 相应的,本发明还公开了一种量子计算机的控制系统,包括: 初始化模块,用于对量子计算机进行初始化设置,并获取单个量子位的最佳控制 信号; 信号输出模块,用于将量子计算应用程序指令和所述最佳控制信号输入量子位控 制模型,得到对应的微波控制信号,以通过量子测控系统完成量子位的操作; 所述量子位控制模型具体为根据量子位布局、量子位个数、量子退相干时间和量 子位操作时序确定结构,并通过所述量子计算机的初始训练数据进行训练优化得到的神经 网络模型; 所述初始训练数据为无所述量子位控制模型时,所述量子计算机在所述量子计算 应用程序指令下的初始控制信号和对应的初始测量数据。 相应的,本发明还公开了一种量子计算机的控制装置,包括: 存储器,用于存储计算机程序; 处理器,用于执行所述计算机程序时实现如上文任一项所述量子计算机的控制方 法的步骤。 相应的,本发明还公开了一种可读存储介质,所述可读存储介质上存储有计算机 程序,所述计算机程序被处理器执行时实现如上文任一项所述量子计算机的控制方法的步 骤。 本发明公开了一种量子计算机的控制方法,包括:对量子计算机进行初始化设置, 并获取单个量子位的最佳控制信号;将量子计算应用程序指令和所述最佳控制信号输入量 子位控制模型,得到对应的微波控制信号,以通过量子测控系统完成量子位的操作;所述量 子位控制模型具体为根据量子位布局、量子位个数、量子退相干时间和量子位操作时序确 定结构,并通过所述量子计算机的初始训练数据进行训练优化得到的神经网络模型;所述 初始训练数据为无所述量子位控制模型时,所述量子计算机在所述量子计算应用程序指令 下的初始控制信号和对应的初始测量数据。本发明通过训练优化得到的神经网络模型,也 5 CN 111612151 A 说 明 书 3/5 页 即量子位控制模型,能够输出远比现有技术更为准确的微波控制信号,排除量子计算机运 行过程中的各类误差,提高量子计算应用程序指令的执行效率。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 提供的附图获得其他的附图。 图1为本发明实施例中一种量子计算机的控制方法的步骤流程图; 图2为本发明实施例中一种量子位控制模型的结构分布图; 图3为本发明实施例中一种量子计算机的控制系统的结构分布图。











