
技术摘要:
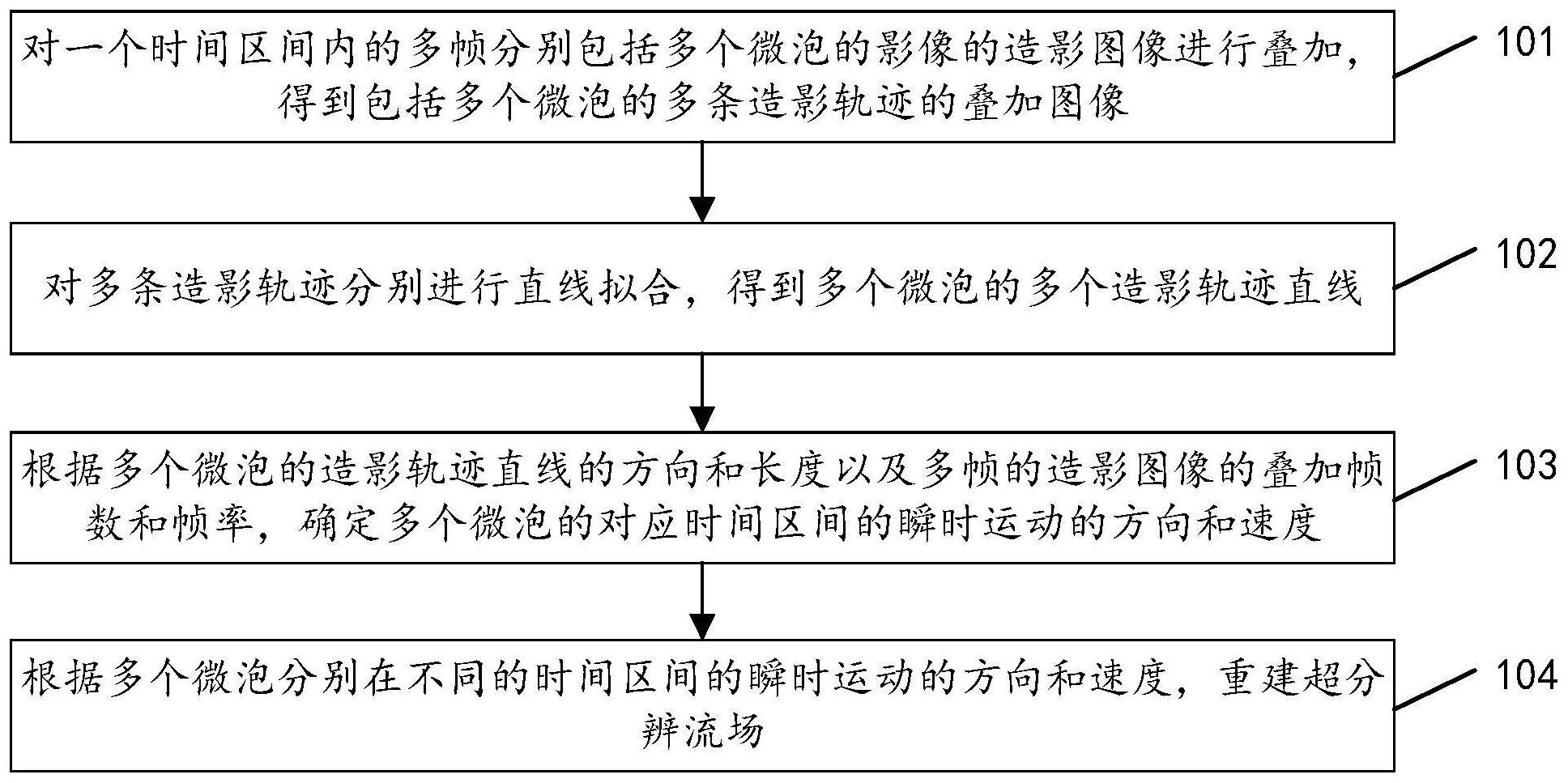
本申请提供了一种超分辨流场重建方法,包括:对一个时间区间内的多帧分别包括多个微泡的影像的造影图像进行叠加,得到包括多个微泡的多条造影轨迹的叠加图像;对所述多条造影轨迹分别进行直线拟合,得到所述多个微泡的多个造影轨迹直线;根据所述多个微泡的造影轨迹直 全部
背景技术:
血流速度、血流流向等功能参数在疾病诊断上意义重大。超声多普勒技术以其安 全、非侵入、廉价等特性被广泛应用于临床血流功能成像,但传统多普勒技术在分辨率上受 到衍射极限的限制。在微泡灌注的基础上,通过稀疏微泡定位和累加相结合,采用近邻匹配 追踪策略进行血流速度及流向功能图的超分辨重建,突破了声学衍射极限的限制。但是,在 临床造影过程中,微泡特征容易受到运动伪影和噪声的影响,尤其是在噪声较强的环境下, 基于定位的传统超分辨方法易产生误定位点,导致后续的近邻匹配追踪产生较大的匹配错 误。
技术实现要素:
有鉴于此,本申请实施例提供了一种超分辨流场重建方法、超分辨流场重建装置 以及电子设备和计算机可读存储介质,克服了现有重建方式的追踪定位过程中微泡运动伪 影的影响和微泡定位噪声干扰,提高了超分辨流场重建的精度及效率。 本申请一方面提供了一种超分辨流场重建方法包括:对一个时间区间内的多帧分 别包括多个微泡的影像的造影图像进行叠加,得到包括多个微泡的多条造影轨迹的叠加图 像;对所述多条造影轨迹分别进行直线拟合,得到所述多个微泡的多个造影轨迹直线;根据 所述多个微泡的造影轨迹直线的方向和长度以及所述多帧的造影图像的叠加帧数和帧率, 确定所述多个微泡的对应所述时间区间的瞬时运动的方向和速度;以及根据所述多个微泡 分别在不同的所述时间区间的瞬时运动的方向和速度,重建超分辨流场。 在一实施例中,所述对一个时间区间内的多帧分别包括多个微泡的影像的造影图 像进行叠加,得到包括多个微泡的多条造影轨迹的叠加图像,还包括:对一个时间区间内的 多帧分别包括多个微泡的影像的造影图像进行配准,得到多帧分别包括多个微泡的影像的 配准后的造影图像;对所述一个时间区间内的多帧分别包括多个微泡的影像的配准后的造 影图像进行叠加,得到包括多个微泡的多条造影轨迹的叠加图像。 在一实施例中,所述对一个时间区间内的多帧分别包括多个微泡的影像的造影图 像进行叠加,得到包括多个微泡的多条造影轨迹的叠加图像包括:对一个时间区间内的连 续的多帧分别包括多个微泡的影像的造影图像进行叠加,得到包括多个微泡的多条造影轨 迹的叠加图像。 在一实施例中,所述对一个时间区间内的连续的多帧分别包括多个微泡的影像的 造影图像进行叠加,得到包括多个微泡的多条造影轨迹的叠加图像包括:对一个时间区间 内的连续的两帧、三帧或四帧所述分别包括多个微泡的影像的造影图像进行叠加,得到包 括多个微泡的多条造影轨迹的叠加图像。 5 CN 111598782 A 说 明 书 2/13 页 在一实施例中,所述不同的所述时间区间包括:开始帧间隔相同帧数,且包括相同 帧数的不同的时间区间。 在一实施例中,对一个时间区间内的多帧分别包括多个微泡的影像的造影图像进 行叠加,得到包括多个微泡的多条造影轨迹的叠加图像包括:对一个时间区间内的多帧分 别包括多个微泡的影像的造影图像进行叠加,得到包括多个微泡的多条初步造影轨迹的叠 加图像;以及对所述叠加图像中的所述多条初步造影轨迹分别进行骨架提取,得到所述多 条造影轨迹; 在一实施例中,所述对所述叠加图像中的所述多条初步造影轨迹分别进行骨架提 取包括:通过迭代腐蚀边界算法对所述叠加图像中的所述多条初步造影轨迹分别进行骨架 提取;和/或通过外接矩形最大灰度积分轴线提取算法对所述叠加图像中的所述多条初步 造影轨迹分别进行骨架提取。 在一实施例中,所述根据所述多个微泡的造影轨迹直线的方向和长度以及所述多 帧的造影图像的叠加帧数和帧率,确定所述多个微泡的对应所述时间区间的瞬时运动的方 向和速度包括:根据所述多个微泡的造影轨迹直线的方向,确定所述多个微泡对应所述时 间区间的瞬时运动的方向;以及根据所述多个微泡的造影轨迹直线的长度和所述多帧的造 影图像的叠加帧数的比值与帧率的乘积,确定所述多个微泡对应所述时间区间的瞬时运动 的速度。 在一实施例中,所述多个微泡的多条造影轨迹直线中的每个微泡的每条造影轨迹 直线包括至少一个像素坐标;其中,所述根据所述多个微泡分别在不同的所述时间区间的 瞬时运动的方向和速度,重建超分辨流场包括:根据所述多个微泡分别在不同的所述时间 区间的瞬时运动的方向和速度,确定所述多个像素坐标对应的微泡分别在不同的所述时间 区间的瞬时运动的方向和速度,并根据所述多个像素坐标对应的微泡分别在不同的所述时 间区间的瞬时运动的方向和速度,重建超分辨流场。 在一实施例中,所述每个微泡的多条造影轨迹包括相同的所述像素坐标;其中,所 述重建超分辨流场包括:计算所述每个微泡的相同的像素坐标对应的瞬时运动的方向和速 度出现的频次,并选择所述频次最高的瞬时运动的方向和速度,重建超分辨流场;和/或计 算所述每个微泡的相同的像素坐标对应的瞬时运动的方向和速度的平均值,重建超分辨流 场;和/或计算所述每个微泡的相同的像素坐标对应的瞬时运动的方向和速度的最大值,重 建超分辨流场。 本申请另一方面提供了一种超分辨流场重建装置,包括:造影轨迹重建模块,对一 个时间区间内的多帧分别包括多个微泡的影像的造影图像进行叠加,得到包括多个微泡的 多条造影轨迹的叠加图像;直线拟合模块,对所述多条造影轨迹分别进行直线拟合,得到所 述多个微泡的多个造影轨迹直线;造影轨迹特征提取模块,根据所述多个造影轨迹直线的 方向和长度以及所述多帧的造影图像的叠加帧数和帧率,确定所述多个微泡的对应所述时 间区间的瞬时运动的方向和速度;以及超分辨流场重建模块,根据所述多个微泡分别在不 同的所述时间区间的瞬时运动的方向和速度,重建超分辨流场。 在一实施例中,超分辨流场重建装置,还包括:配准模块,对一个时间区间内的多 帧分别包括多个微泡的影像的造影图像进行配准,得到多帧分别包括多个微泡的影像的配 准后的造影图像。 6 CN 111598782 A 说 明 书 3/13 页 在一实施例中,造影轨迹重建模块,包括:初步造影轨迹重建模块,对一个时间区 间内的多帧分别包括多个微泡的影像的造影图像进行叠加,得到包括多个微泡的多条初步 造影轨迹的叠加图像;骨架提取模块,对所述叠加图像中的所述多条初步造影轨迹分别进 行骨架提取,得到所述多条造影轨迹。 本申请另一方面提供了一种电子设备,包括:处理器;以及存储器,在所述存储器 中存储有计算机程序指令,所述计算机程序指令在被所述处理器运行时使得所述处理器执 行如前任一所述的超分辨流场重建方法。 本申请另一方面提供了一种计算机可读存储介质,所述计算机可读存储介质上存 储有计算机程序指令,所述计算机程序指令在被处理器运行时使得所述处理器执行如前任 一所述的超分辨流场重建方法。 本申请实施例提供的一种超分辨流场重建方法、超分辨流场重建装置以及电子设 备和计算机可读存储介质,利用多个微泡在一个时间区间内多帧叠加的造影图像形成的轨 迹,计算一个时间区间内多个微泡的瞬时运动参数,再根据多个微泡分别在不同的时间区 间的瞬时运动参数,重建超分辨流场,避免了对运动中的多个微泡进行追踪定位,克服了现 有重建方式的追踪定位过程中微泡运动伪影的影响和微泡定位噪声的干扰,提高了超分辨 流场重建的精度和效率。 附图说明 图1所示为本申请一实施例提供的一种超分辨流场重建方法的流程示意图。 图2A所示为本申请一实施例提供的包括多个微泡的多条造影轨迹的叠加图像的 示意图。 图2B所示为本申请一实施例提供的包括多个微泡的多条造影轨迹直线的图像的 示意图。 图2C所示为本申请一实施例提供的包括多个微泡的多条造影轨迹直线方向的图 像的示意图。 图3A所示为本申请另一实施例提供的连续的两帧造影图像叠加后的图像。 图3B所示为本申请另一实施例提供的连续的三帧造影图像叠加后的图像。 图3C所示为本申请另一实施例提供的连续的四帧造影图像叠加后的图像。 图3D所示为本申请另一实施例提供的连续的五帧造影图像叠加后的图像。 图4A所示为本申请另一实施例提供的连续的两帧造影图像叠加后的图像。 图4B所示为本申请另一实施例提供的连续的三帧造影图像叠加后的图像。 图4C所示为本申请另一实施例提供的连续的四帧造影图像叠加后的图像。 图5所示为本申请另一实施例提供的一种超分辨流场重建方法的流程示意图。 图6所示为本申请另一实施例提供的一种超分辨流场重建方法的流程示意图。 图7A所示为本申请另一实施例提供的包含多条初步造影轨迹的叠加图像的示意 图。 图7B所示为本申请另一实施例提供的包含多条初步造影轨迹轮廓的叠加图像的 示意图。 图7C所示为本申请另一实施例提供的包含多条造影轨迹的叠加图像的示意图。 7 CN 111598782 A 说 明 书 4/13 页 图8所示为本申请另一实施例提供的一种超分辨流场重建方法的流程示意图。 图9所示为本申请另一实施例提供的包括多个微泡的多条造影轨迹直线的图像的 示意图。 图10A所示为本申请另一实施例提供的一种超分辨流场图。 图10B所示为图10A中超分辨流场图的A区域的局部放大图。 图11所示为本申请一实施例提供的超分辨流场重建装置的结构示意图。 图12所示为本申请另一实施例提供的超分辨流场重建装置的结构示意图。 图13所示为本申请另一实施例提供的造影轨迹重建模块的结构示意图。 图14所示为本申请一实施例提供的电子设备的结构示意图。











