
技术摘要:
本发明涉及一种盾构机初始定位快速分中测量方法,用于盾构机始发前对盾构机姿态进行纠偏,该方法通过建立独立坐标系,在盾构机刀盘和盾尾取四个点通过垂径定理理论计算得到盾构机的平面中心线,并以此为新的独立坐标系基准线利用坐标转换公式算出盾构机内前后尺测量平 全部
背景技术:
盾构施工中对盾构机姿态的准确测量,是确保盾构机能够始终沿设计轴线向前推 进,起到了导向的作用。盾构测量中需测出切口与盾尾的偏差,才能对盾构机进行纠偏。在 实际盾构推进后,由于盾构机进入土体中,切口和盾尾是无法直接测到的,而是通过安装在 盾构机壳体内部的测量标志,对测量标志进行实测后,采用理论的方法间接地进行推算出 切口与盾尾的偏差。而盾构机内测量标志的精确分中的程度,直接影响到测量的误差大小, 从而影响到切口与盾尾的偏差。在盾构机始发之前,对测量标志应进行精确分中是盾构始 发初始定位最关键的一步。传统的平移法进行分中不仅速度慢,耗费人力多,且测量精度也 较低,极大的限制了盾构工程的顺利推进。
技术实现要素:
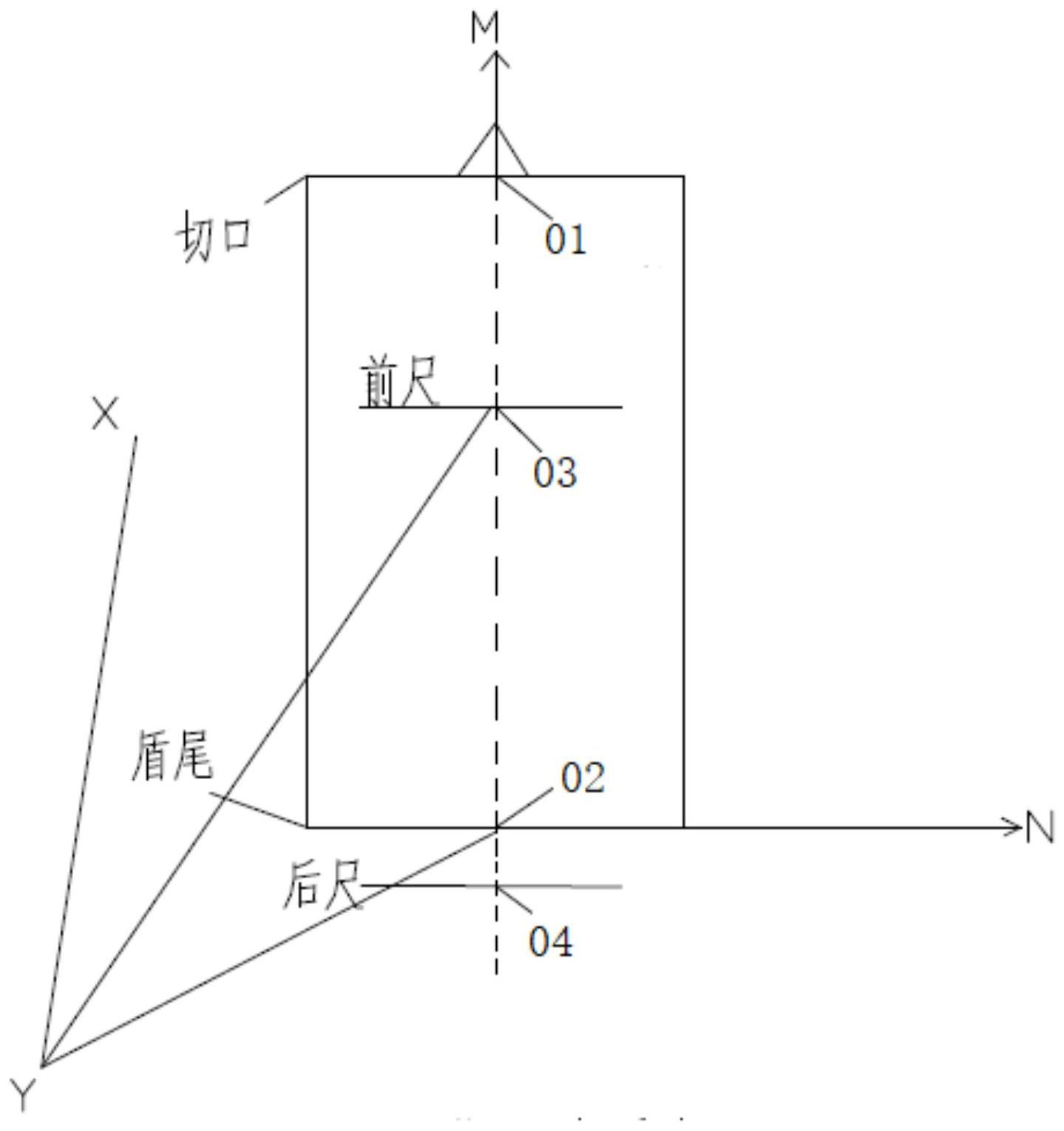
为了克服盾构始发初始定位中后座设备挡住测量视线的问题,本发明提供一种盾 构机初始定位快速分中测量方法,该方法能有效解决盾构机初始定位时,测量视线受阻、测 量速度慢、测量精度低的问题。 本发明所采用的技术方案是:一种盾构机初始定位快速分中测量方法,具体包括 如下步骤: (1)首先以点X-Y建立一个独立坐标系,在点X架设仪器,测出切口圆弧上点A{Xa, Ya,Za},B{Xb,Yb,Zb}两点的三维坐标,使得Za=Zb,即弦长AB为水平弦,同理测出盾尾圆弧 上点C{Xc,Yc,Zc},D{Xd,Yd,Zd},使得Zc=Zd,利用垂径的定理:弦的垂直平分线必过圆心, 即O1E⊥AB,O2F⊥CD; (2)算出O1和O2点的平面坐标,O1{XO1,YO1},其中XO1=(Xa Xb)/2,YO1=(Ya Yb)/2, 同样O2{XO2,YO2},XO2=(Xc Xd)/2,YO2=(Yc Yd)/2,在盾构机外壳上画好O1和O2点的标志, 直线O1O2点即为盾构机的平面中心线,其中:O1为切口平面中心点,O2为盾尾平面中心点; (3)在盾构机壳体内,以盾构机平面中心直线O1O2为基准,M02N轴线建立独立坐标 系,在点Y架设仪器,点X为后视,测出盾构机内前、后尺测量标志的坐标点O3和O4,即O3{XO3, YO3},O4{XO4,YO4},再利用坐标转换公式; MO3=XO2 XO3*COS(α)-YO3*SIN(α) NO3=XO2 XO3*COS(α)-YO3*SIN(α) 其中α为直线O1O2在原坐标系中的的方位角,算出O3点在新坐标系中的坐标O3 {MO3,NO3},不断测出O3点的坐标,并且计算NO3,使NO3=0,即O3点位于中心直线O1O2上,也就 是O3点是前尺的平面中心点,同理测出O4点,并且计算O4{MO4,NO4},使NO4=0,O4点也于中心 直线O1O2上,即O4点是后尺的平面中心点; 3 CN 111578873 A 说 明 书 2/2 页 (4)通过以上步骤,完成了盾构机内测量标志,前尺,后尺的平面精确分中。 本发明的有益效果是: 本发明的盾构机初始定位快速分中测量方法,用于盾构机始发前对盾构机姿态进 行纠偏。该方法通过建立独立坐标系,在盾构机刀盘和盾尾取四个点通过垂径定理理论计 算得到盾构机的平面中心线,并以此为新的独立坐标系基准线利用坐标转换公式算出盾构 机内前后尺测量平面中心点的坐标,不断建立新的独立坐标系使得盾构机内前后尺测量的 平面中心点位置坐标为零,最终完成盾构机内测量标志的平面精确分中。此方法与传统方 法比较,操作简便、测量精度更高、速度更快,大大缩短了工程的工期,且所需人力更少,极 大的降低了城市地下空间作业的风险,在技术可行性、工作效率、实施效果上都大大强于传 统方式。 附图说明 图1是本发明的弦长分中法示意图; 图2是本发明的独立坐标系法示意图。











