
技术摘要:
本发明属于医疗设备技术领域,具体涉及一种协同递送导丝和微导管的同轴操控装置,旨在解决现有技术中手术送丝装置不能协同地递送多个器械的问题。本发明提供了一种协同递送导丝和微导管的同轴操控装置,包括基座和至少两个递送装置,各递送装置之间距离可变且均通过伸 全部
背景技术:
血管介入手术是一种医生在血管减影造影(DSA)设备的指导下,操纵介入器械在 人体血管内运动,最终准确到达病变处并进行治疗的方法。常见的介入器械有静脉导管、导 丝、滤器、弹簧栓子等。在血管介入手术中,有时由于导丝的相对操作难度较大,医生在向病 变处推入导丝和导管后,需要撤出导丝并在导管内推入一个微导管,借助微导管来进行后 续操作。 目前越来越多的微导管可以用来做如专门治疗分叉病变微导管,用于肿瘤栓塞的 微导管,用于在脑出血中释放弹簧圈的微导管,微导管已经越来越广泛的应用在介入手术 当中,而现有的介入手术机器人都是快速交换介入手术机器人,不能同时使用微导管和导 丝的配套动作,不能完成以上复杂手术。 在血管介入手术中,由于操作对象较小且手术时间较长,可能会使得医生由于疲 劳出现手部颤抖等反应,从而加大手术中的潜在风险。同时,由于医学成像设备的存在,医 生需要长时间暴露在射线环境下,对身体伤害极大。这些缺点对血管介入性手术的应用造 成了一定的限制,将机器人技术应用到手术过程中将是一项有效改进上述缺点的措施。机 器人辅助手术的关键步骤是:(1)通过旋转、推送等操作,将导引导丝准确送达病变处;(2) 在导丝成功放置后,将导管递送至病变处;(3)撤出导丝,在导管内推入微导管到达病变处 并进行后续操作。 目前国内应用的血管介入手术送丝装置通常只能单独递送某一个介入器械,而不 能协同地递送多个器械,例如协同地递送导丝和微导管等。
技术实现要素:
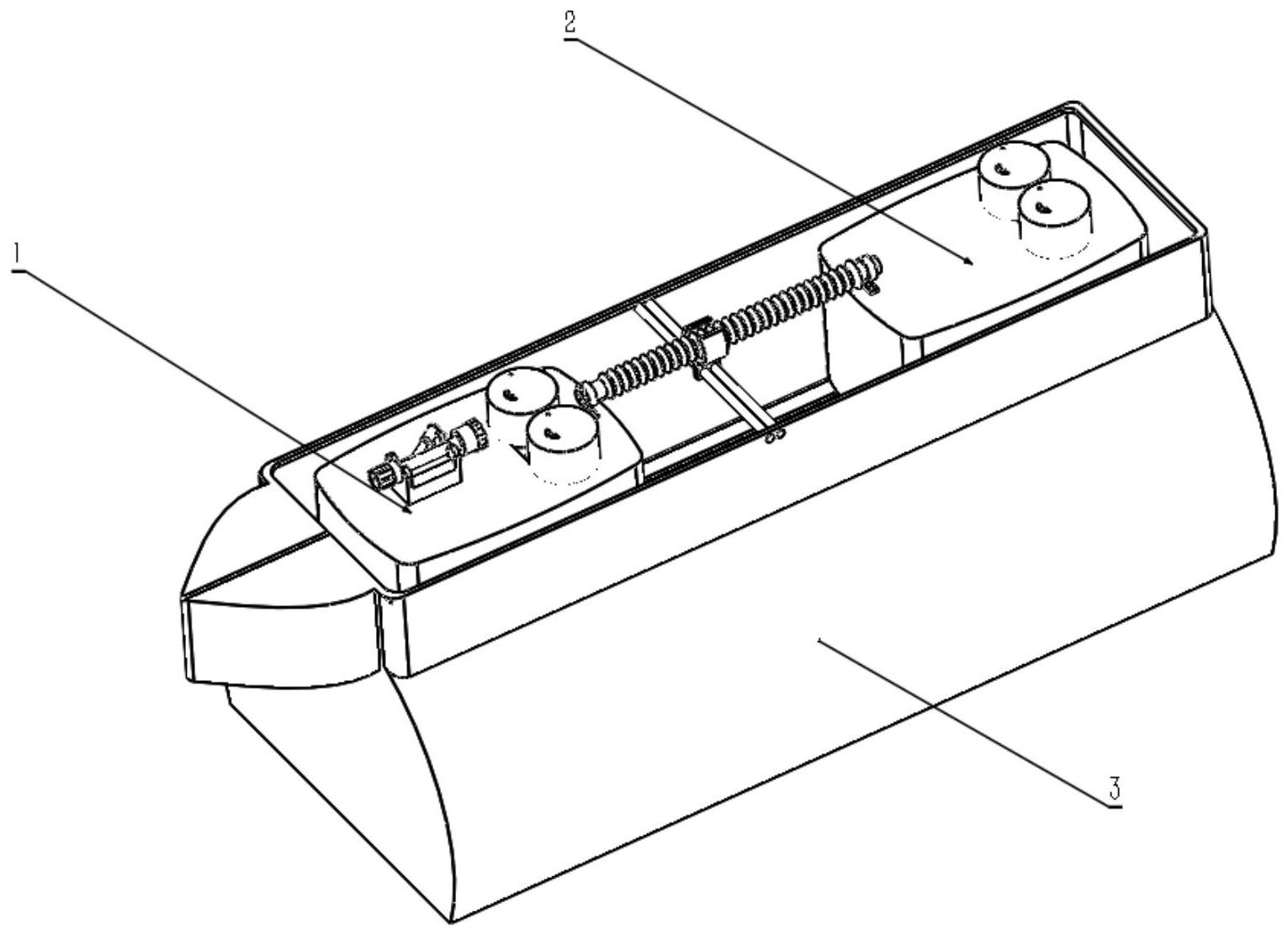
为了解决现有技术中的上述问题,即为了解决现有技术中手术送丝装置通常只能 单独递送某一个介入器械,而不能协同地递送多个器械的问题,本发明提供了一种协同递 送导丝和微导管的同轴操控装置,包括基座、至少两个递送装置、控制器,各所述递送装置 分别活动设置于所述基座并与所述控制器通信连接,相邻的两个所述递送装置之间通过伸 缩组件连接; 所述递送装置包括固定构件和移动组件,所述固定构件与所述伸缩组件连接并能 够在所述移动组件的驱动下行走,所述伸缩组件的长度依据与其连接的两个递送装置之间 的距离而变化; 所述固定构件上设置有主指组件、副指组件、驱动组件,所述主指组件包括设置于 导丝/微导管一侧的主滚轮,所述副指组件包括设置于导丝/微导管背离所述主滚轮一侧的 副滚轮,所述主滚轮和所述副滚轮轴线平行设置;所述驱动组件可以调节所述主滚轮和所 4 CN 111544741 A 说 明 书 2/8 页 述副滚轮的轴线间距,以对导丝/微导管进行夹持或释放; 导丝/微导管被所述主滚轮和所述副滚轮夹紧时,所述驱动组件可以驱动所述主 滚轮的轴向转动以使导丝/微导管沿其自身轴向进行位移;和/或驱动所述主滚轮进行轴向 移动,用于捻动被夹持的导丝/微导管以自身轴向旋转; 各所述递送装置的运动方向与导丝/微导管的轴向同向,所述伸缩组件用于支撑 相邻的两个所述递送装置之间的导丝/微导管。 在一些优选技术方案中,所述驱动组件包括第一动力机构,所述副滚轮在所述第 一动力机构的驱动下靠近或背离所述主滚轮,以使设置于所述副滚轮与所述主滚轮之间的 导丝/微导管被夹紧或被释放。 在一些优选技术方案中,所述驱动组件包括第二动力机构,所述主滚轮在所述第 二动力机构的驱动下沿所述主滚轮自身轴向位移,以捻动所夹持的被操作的导丝/微导管 转动。 在一些优选技术方案中,所述驱动组件包括第三动力机构,所述主滚轮在所述第 三动力机构的驱动下沿所述主滚轮自身轴向转动,以使所夹持的被操作的导丝/微导管沿 其自身轴向移动。 在一些优选技术方案中,所述第一动力机构通过第一传动机构设置于所述固定构 件,所述第一传动机构包括导轨和L形齿轮板; 所述导轨固设于所述固定构件并垂直于所述副滚轮轴线设置,所述L形齿轮板一 端活动设置于所述导轨,另一端用于固定所述副滚轮,所述第一动力机构通过驱动与所述L 形齿轮板啮合的第一齿轮转动,以使所述L形齿轮板带动所述副滚轮靠近或背离所述主滚 轮。 在一些优选技术方案中,所述第二动力机构通过第二传动机构设置于所述固定构 件,所述第二传动机构包括直线移动副,所述第二动力机构通过所述直线移动副驱动所述 主滚轮沿竖直方向上下移动。 在一些优选技术方案中,所述移动组件固设于所述固定构件,所述移动组件包括 行走机构和第四动力机构,所述行走机构包括行走轮,所述第四动力机构用于驱动所述行 走轮沿所述基座上的预设轨道行走。 在一些优选技术方案中,所述行走机构还包括固定于所述固定构件底部并垂直于 所述递送装置运动方向设置的行走架,所述行走架上至少设置有两个所述行走轮,所述预 设轨道为沿导丝/微导管轴向对称设置且分别于与两个所述行走轮配合的两条轨道。 在一些优选技术方案中,所述伸缩组件上设置有支撑机构,所述支撑机构固设于 所述基座,且设置有用于固定所述伸缩组件的通孔,所述支撑机构用于支撑所述伸缩组件。 在一些优选技术方案中,所述主滚轮、所述副滚轮均包括滚轮和橡胶套,所述橡胶 套通过过盈配合套在所述滚轮上。 本发明的有益效果: 本发明的协同递送导丝和微导管的同轴操控装置不仅能够操纵导丝和微导管完 成推进、旋转或同时进行推进和旋转的动作,还能协同地操纵导丝的撤出和微导管的推进 运动。 本发明递送装置通过各递送装置和基座之间的位置关系,以及主指组件、副指组 5 CN 111544741 A 说 明 书 3/8 页 件、驱动组件之间的结构关系,构建了用于血管介入手术的协同递送导丝或微导管的操纵 装置,能够实现导丝或微导管的单独递送和旋转以及二者的协同控制,提高了医生的工作 效率,降低了医生在放射环境下的工作时间,减小了手术的失败率,同时增加了介入手术的 操纵精度。 附图说明 通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它 特征、目的和优点将会变得更明显: 图1为本发明一种实施例的协同递送导丝和微导管的同轴操控装置整体结构示意 图; 图2为本发明一种实施例中前递送装置的结构示意图; 图3为本发明一种实施例中前递送装置主指组件的结构示意图; 图4为本发明一种实施例中前递送装置副指组件的结构示意图; 图5为本发明一种实施例中前递送装置驱动组件的结构示意图; 图6为本发明一种实施例中前递送装置固定构件的结构示意图; 图7为本发明一种实施例中后递送装置固定构件的结构示意图; 图8为本发明一种实施例中伸缩组件的结构示意图; 附图标记列表: 1-前递送装置,2-后递送装置,3-基座,4-主指组件,5-副指组件,6-驱动组件,7- 主滚轮,8-推进电机连接件,9-推进电机,10-主滚轮连接板,11-主滚轮位置滑轨套,12-主 滚轮位置滑轨,13-主滚轮高度滑轨,14-主滚轮高度滑轨套,15-旋转电机,16-丝杠,17-丝 杠座,18-旋转电机连接板,19-中齿轮,20-大齿轮,21-副滚轮,22-L形齿轮板,23-小齿轮, 24-夹紧电机连接件,25-夹紧电机,26-夹紧电机连接板,27-副滚轮水平滑轨套,28-副滚轮 水平导轨,29-副滚轮高度滑轨,30-副滚轮高度滑轨套,31-拐臂,32-三叉管固定件,33-固 定构件,34-齿轮轴连接件,35-前伸缩管位置孔,36-驱动小齿轮,37-驱动电机,38-圆柱齿 轮,39-行走架,40-后伸缩管位置孔,41-位置固定横杆,42-伸缩管固定夹,43-伸缩管,44- 齿条,45-长方管,46-短方管。











