
技术摘要:
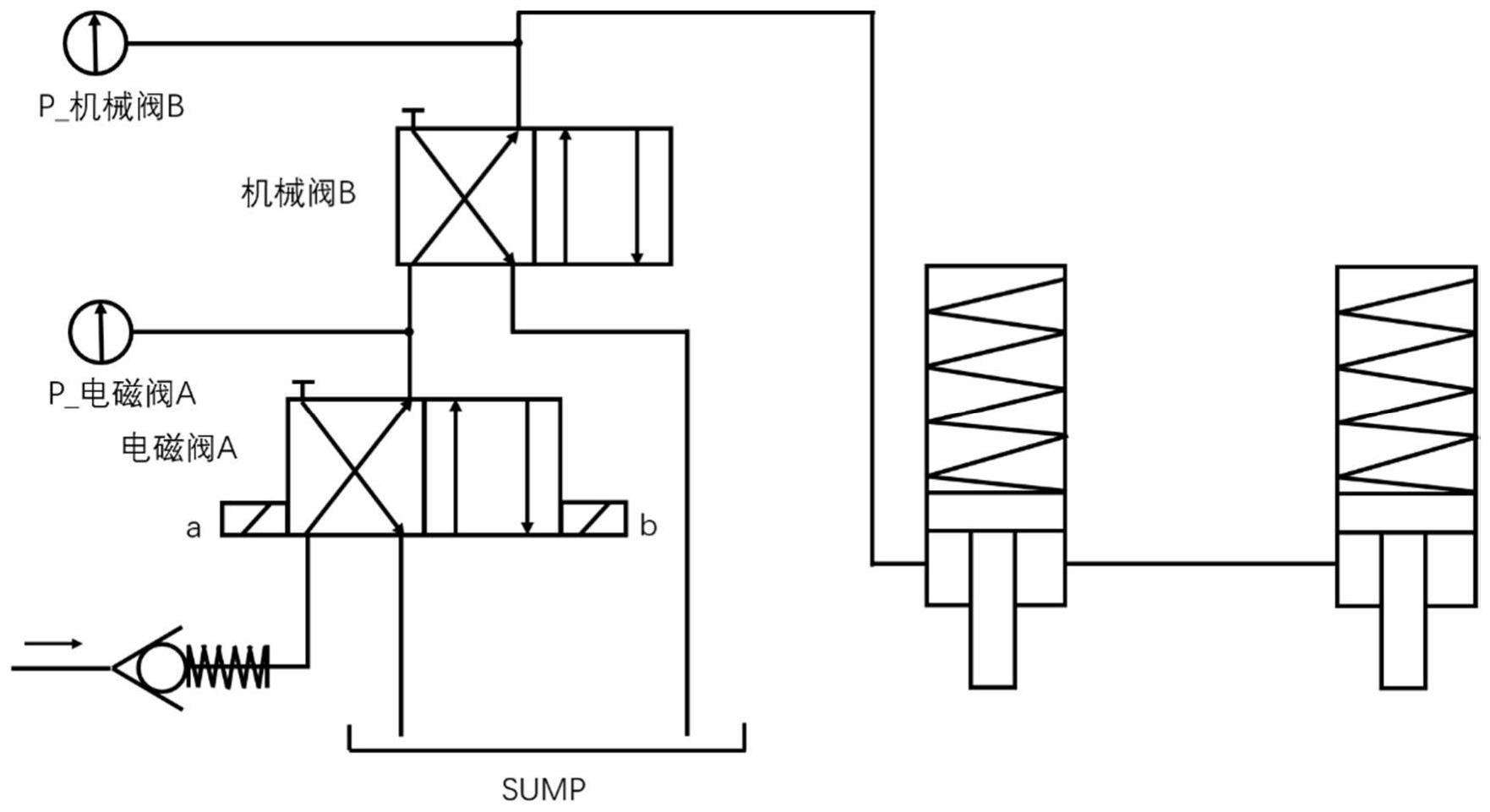
一种大马力CVT拖拉机自动驻车系统,包括电磁阀A和机械阀B,手刹开关与机械阀B相连,刹车片连接活塞,通过电磁阀A和机械阀B连接组成控制回路;车辆正常行驶时活塞充油顶起,车辆不进行制动;当整车TCU判断需要自动驻车时,电磁阀A进行切换动作,活塞压下将油排出,车辆 全部
背景技术:
国产拖拉机的自动化程度低,在行驶过程中经常需要反复的启动,当车辆行进在 坡道上时,如果突然发生动力传递中断,很容易出现溜坡现象。对于目前正在开发的大马力 CVT拖拉机,由于可以适用于各个复杂工况,因此也需求更加贴合驾驶员操作习惯的功能。 设计一种自动驻车系统,可以在驾驶员不踩下油门的情况下,根据整车TCU控制系 统计算的扭矩数值来判定在多长时间内自动接合整车的驻车机构,并且在下一次踩下油门 踏板后解除自动驻车机构,以此来实现坡道悬停的功能,进而有效的防止拖拉机出现溜坡, 使驾驶者在车辆停下时不需要长时间踩下刹车踏板,避免不必要的滑行,是亟需解决的一 个问题。
技术实现要素:
本发明的目的在于针对现有技术中拖拉机反复启动容易出现动力中断的问题,提 供一种大马力CVT拖拉机自动驻车系统,满足上下坡以及频繁起停时的驻车需要,方便操 作。 为了实现上述目的,本发明采用如下的技术方案: 一种大马力CVT拖拉机自动驻车系统,包括电磁阀A和机械阀B,手刹开关与机械阀 B相连,刹车片连接活塞,通过电磁阀A和机械阀B连接组成控制回路;车辆正常行驶时活塞 充油顶起,车辆不进行制动;当整车TCU判断需要自动驻车时,电磁阀A进行切换动作,活塞 压下将油排出,车辆进行制动;当驾驶员判断需要驻车时,通过手刹开关控制机械阀B,机械 阀B进行切换动作,活塞压下将油排出,车辆进行制动。 作为本发明的一种优选方案,所述电磁阀A与机械阀B的输出端管路上分别设有一 个压力传感器,通过对比两个传感器的数值进行实时监控。 作为本发明的一种优选方案,设定一个默认值作为标志位的参考值,当从压力传 感器的读数大于或等于参考值时,判断手动/自动驻车脱开使能;当从压力传感器的读数小 于参考值时,判断手动/自动驻车脱开关闭。 作为本发明的一种优选方案,通过读取标志位判断电磁阀A和机械阀B的实际状 态;当读取的标志位是手动驻车脱开关闭和自动驻车脱开使能时,说明手刹接合,即电磁阀 A处于打开位置,机械阀B处于关闭位置;当读取的标志位是手动驻车脱开使能和自动驻车 脱开使能时,活塞被顶起不进行自动驻车工作,即电磁阀A处于打开位置,机械阀B处于打开 位置,为整车在正常行进时的状态;当读取的标志位是手动驻车脱开关闭和自动驻车脱开 关闭时,证明自动驻车功能启动,即电磁阀A处于关闭位置,此时无论机械阀B处于哪个位置 均能够实现自动驻车的功能,又因为机械阀B与整车的手刹相关联,当驾驶员无按下手刹的 动作时,机械阀B处于打开位置。 3 CN 111591266 A 说 明 书 2/3 页 作为本发明的一种优选方案,系统运行输入状态判断,包括自动驻车使能、整车状 态确认、点火信号是否输入以及油门踏板是否踩下的判断。 作为本发明的一种优选方案,系统运行反馈条件判断,包括系统是否处于自动驻 车功能运行后的状态以及运行自动驻车功能后的实时测速,该判断完成后结合输入状态判 断的条件,根据扭矩计算公式在延迟设定时间后,输出自动驻车与驻车脱开的命令,并且当 车辆运行完成重新点火时,输出端输出快速重启的命令。 作为本发明的一种优选方案,系统运行自动驻车功能的诊断,在启用自动驻车功 能时,控制系统实时监测各个相关执行机构的状态以及控制模型输出命令的准确性,排除 在实现自动驻车功能时可能会出现的问题。 相较于现有技术,本发明具有如下的有益效果:通过电磁阀A和机械阀B连接组成 控制回路,在电磁阀控制的过程中可以充分结合整车的运行情况,按照控制需求将其可分 化为如下阶段:整车未点火时,系统完全关闭;点火信号输入,系统快速启动;点火信号断 开,系统运行后待机;点火信号再次输入,系统快速重启。本发明通过将机械、液压、电气、计 算机控制相结合,所设计的该自动驻车系统极大的改善了驾驶员对驾驶的体验,贴合乘用 车的驾驶习惯,使车辆不会控制滞后,避免不必要的滑行,本发明特别适用于大马力CVT拖 拉机上下坡以及频繁起步停车时,能够推进智慧农业的发展,未来应用前景广阔。 附图说明 图1本发明自动驻车系统的结构原理示意图; 图2本发明自动驻车系统的数值监控及控制方案示意图; 图3本发明自动驻车系统的控制逻辑框图; 图4本发明自动驻车系统的控制流程图。











