
技术摘要:
本发明公开了一种无人驾驶车辆控制系统及其操作方法,具体涉及无人驾驶技术领域,包括用于数据接收和数据处理的处理器,所述处理器输出端连接有用于生成车辆驾驶区域地图的地图线路生成模块和用于生成车辆驾驶线路的驾驶路径生成模块,所述地图线路生成模块输入端连接 全部
背景技术:
无人驾驶车辆是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆 到达预定目标的智能车辆。它是利用车载传感器来感知车辆周围环境,并根据感知所获得 的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在 道路上行驶,无人驾驶车辆技术正在慢慢成熟,国内无人驾驶技术也有20多年的历史,但是 无人驾驶技术多为单个车辆的无人驾驶,由于不能根据道路交通状况及时调整车速和方 向,只能应用在探测等无其他车辆行驶的辖区;现有技术中有些是具有社交行为的无人驾 驶车辆,运用复杂的算法规划车辆应该走的路线,实现了无人驾驶车辆在道路上行驶。 现有技术存在以下不足:现有的无人驾驶车辆对与复杂的路况没有很好的监测方 式,只能沿着导航进行自动行驶,自动行驶稳定性差,同时由于车辆处于自动驾驶状态,车 主对车辆的操控降低,此时车主的注意力低下,影响行驶安全,可靠性较低的问题。
技术实现要素:
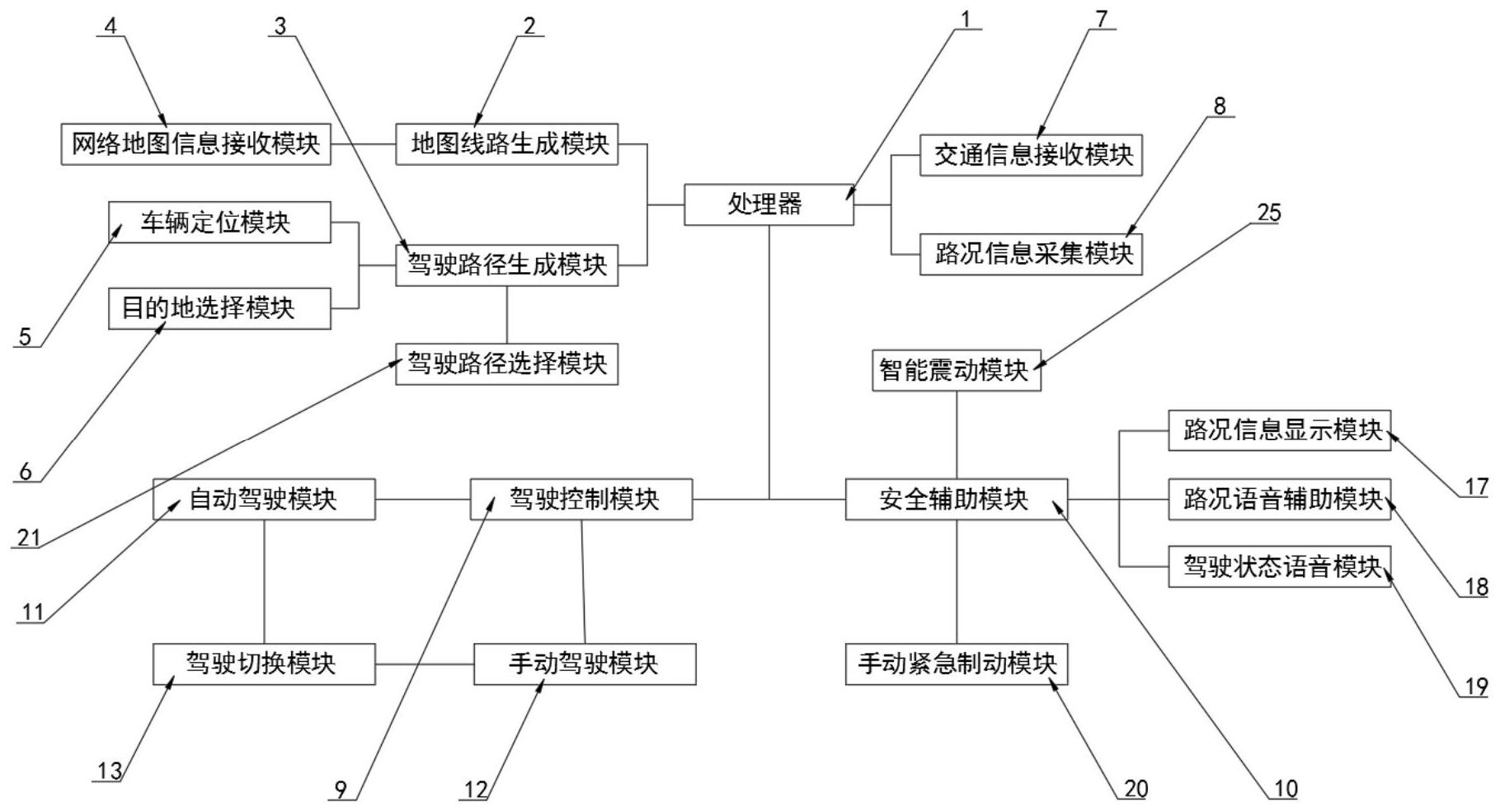
为此,本发明实施例提供一种无人驾驶车辆控制系统及其操作方法,通过车辆位 置信息和目的地位置信息结合网络地图,生成驾驶路径进行车辆行驶导航,路况信息显示 模块路况语音辅助模块和驾驶状态语音模块实时对自动驾驶的情况对车主进行提醒,方便 车主集中注意力,提高车辆行驶稳定性和安全性,以解决现有技术中由于自动行驶稳定性 差,影响行驶安全,可靠性较低的问题导致的问题。 为了实现上述目的,本发明实施例提供如下技术方案:一种无人驾驶车辆控制系 统,包括用于数据接收和数据处理的处理器,所述处理器输出端连接有用于生成车辆驾驶 区域地图的地图线路生成模块和用于生成车辆驾驶线路的驾驶路径生成模块,所述地图线 路生成模块输入端连接有用于接收网络地理信息系统中地图信息的网络地图信息接收模 块,所述驾驶路径生成模块输入端连接有用于车辆位置坐标定位的车辆定位模块和用于选 择车辆行驶目的地坐标位置的目的地选择模块; 所述处理器输入端连接有用于接收道路交通信息的交通信息接收模块和用于接 收道路实况信息的路况信息采集模块,所述处理器输出端连接有用于控制车辆行驶状态的 驾驶控制模块和用于在自动驾驶状态下为车主提供车辆行驶关注功能的安全辅助模块,所 述驾驶控制模块输出端连接有用于系统自动控制车辆行驶的自动驾驶模块和用于车主手 动驾驶车辆的手动驾驶模块,所述自动驾驶模块与手动驾驶模块之间连接有用于切换驾驶 方式的驾驶切换模块; 所述路况信息采集模块输入端连接有用于接收道路图像信息的视频采集单元、用 于检测车辆与道路中其他车辆间距的超声波测距单元和用于检测道路行人情况的红外检 4 CN 111583696 A 说 明 书 2/5 页 测单元,所述视频采集单元设置为摄像头,所述超声波测距单元设置为超声波测距仪,所述 红外检测单元设置为红外线传感器; 所述安全辅助模块输出端连接有用于将采集到的车外路况图像信息进行显示的 路况信息显示模块、用于对车外路况情况进行语音提醒的的路况语音辅助模块和用于对车 辆行驶状态进行语音提示的驾驶状态语音模块,所述安全辅助模块输入端连接有用于车主 直接控制车辆进行制动的手动紧急制动模块。 进一步地,所述驾驶路径生成模块根据地图信息、车辆位置信息和目的地位置信 息生成多条驾驶路径,所述驾驶路径生成模块输入端连接有用于车主选择的行驶路径的驾 驶路径选择模块。 进一步地,所述自动驾驶模块输出端连接有用于控制车辆自动转向的自动转向模 块、用于控制车辆启动和刹车的自动制动模块和用于控制车辆行驶速度的自动加速模块。 进一步地,所述安全辅助模块输出端连接有用于在路况语音辅助模块和驾驶状态 语音模块工作时对驾驶员进行同步震动提醒的的智能震动模块。 一种无人驾驶车辆控制系统操作方法,具体操作步骤如下: 步骤一:启动车辆,车辆定位模块对车辆位置进行定位,地图线路生成模块利用网 络地图信息接收模块接收到的网络地图信息生成车辆所在位置区域的线路地图; 步骤二:利用目的地选择模块进行驾驶目的地位置选择,驾驶路径生成模块根据 车辆位置与目的地位置在线路地图上生成多条驾驶路径供车主选择,车主操作驾驶路径选 择模块选择一条驾驶路径,提供车辆路径导航; 步骤三:操作驾驶切换模块将驾驶控制模块选择自动驾驶模块,控制车辆沿步骤 二中选择的路径进行自动驾驶; 步骤四:交通信息接收模块接收行驶路径道路上的交通情况,路况信息采集模块 采集道路实况信息,视频采集单元进行车辆行驶路况视频信息采集,超声波测距单元利用 超声波测距技术实时检测与道路其他车辆的间距,红外检测单元利用红外感应技术检测道 路上行人情况信息,处理器对接收到的信息进行智能处理,通过自动驾驶模块实现车辆在 道路自动行驶调整; 步骤五:在车辆自动行驶过程中,路况信息显示模块对采集到的路况信息进行显 示,使车主对车外各个方向的情况,同时路况语音辅助模块对出现的路况情形进行语音提 示,在车辆自动驾驶时出现自动调整驾驶状态时驾驶状态语音模块对车主进行语音提示, 在出现紧急情况时,车主可以直接通过手动紧急制动模块对自动驾驶状态下的车辆进行制 动操作; 步骤六:在车主不使用车辆自动驾驶功能时,操作驾驶切换模块将驾驶控制模块 选择手动驾驶模块,仅自动驾驶功能关闭,车主手动驾驶车辆行驶。 本发明实施例具有如下优点: 1、本发明通过地图线路生成模块和驾驶路径生成模块,根据网络地图信息接收模 块接收网络地图信息,配合车辆位置信息和目的地位置信息,驾驶路径生成模块生成驾驶 路径,实现车辆行驶导航,利用交通信息接收模块采集道路交通情况信息,路况信息采集模 块通过视频采集单元进行车辆行驶路况视频信息采集,超声波测距单元利用超声波测距技 术实时检测与道路其他车辆的间距,红外检测单元利用红外感应技术检测道路上行人情况 5 CN 111583696 A 说 明 书 3/5 页 信息,进而为车辆的自动驾驶提供准确的道路信息,方便进行驾驶自动调整,同时在车辆自 动行驶过程中,路况信息显示模块对采集到的路况信息进行显示,使车主对车外各个方向 的情况,同时路况语音辅助模块对出现的路况情形进行语音提示,在车辆自动驾驶时出现 自动调整驾驶状态时驾驶状态语音模块对车主进行语音提示,进而避免在自动驾驶过程 中,车主实时了解车辆自动行驶状态,提高车主注意力,在紧急情况时,车主可以直接通过 手动紧急制动模块对自动驾驶状态下的车辆进行制动操作,方便系统的应用,提高车辆行 驶稳定性和安全性; 2、本发明通过设置驾驶切换模块进行自动驾驶和手动驾驶的功能切换,在车辆面 临复杂的路况或车主想自行驾驶时,转换车辆行驶方式,同时路径导航功能继续工作,为车 主的手动驾驶提供导航效果,方便系统在车辆上应用。 附图说明 为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方 式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅 仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 提供的附图引伸获得其它的实施附图。 本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供 熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的 实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功 效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。 图1为本发明提供的系统结构示意图; 图2为本发明提供路况信息采集模块的系统结构示意图; 图3为本发明提供自动驾驶模块的系统结构示意图; 图中:1处理器、2地图线路生成模块、3驾驶路径生成模块、4网络地图信息接收模 块、5车辆定位模块、6目的地选择模块、7交通信息接收模块、8路况信息采集模块、9驾驶控 制模块、10安全辅助模块、11自动驾驶模块、12手动驾驶模块、13驾驶切换模块、14视频采集 单元、15超声波测距单元、16红外检测单元、17路况信息显示模块、18路况语音辅助模块、19 驾驶状态语音模块、20手动紧急制动模块、21驾驶路径选择模块、22自动转向模块、23自动 制动模块、24自动加速模块、25智能震动模块。











