
技术摘要:
本发明公开了一种基于地理位置的三维虚拟地图可视化引擎技术及装置,属于虚拟地图技术领域,一种基于地理位置的三维虚拟地图可视化引擎技术及装置,通过黑白的贴图和纹理,可以在降低三维虚拟模型数据大小的同时不影响三维虚拟模型的辨识度,加快反应速度,同时通过实 全部
背景技术:
数据库(Database)是按照数据结构来组织、存储和管理数据的仓库,它产生于距 今六十多年前,随着信息技术和市场的发展,特别是二十世纪九十年代以后,数据管理不再 仅仅是存储和管理数据,而转变成用户所需要的各种数据管理的方式。数据库有很多种类 型,从最简单的存储有各种数据的表格到能够进行海量数据存储的大型数据库系统都在各 个方面得到了广泛的应用。在信息化社会,充分有效地管理和利用各类信息资源,是进行科 学研究和决策管理的前提条件。数据库技术是管理信息系统、办公自动化系统、决策支持系 统等各类信息系统的核心部分,是进行科学研究和决策管理的重要技术手段。 虚拟的三维实景地图在使用时,相较于二维地图的平面信息,虚拟的三维实景内 含有大量的实景三维的建模模型,使其所需要的数据流非常大,同时这种虚拟导航虽然做 到了三维,但是使用者肉眼见到的也只是三维模型的实景,辨识度存在一定缺陷,但是现有 的虚拟地图的可视化导航对于网络的依赖性较大,尤其是在GPS信号弱的区域,大部分导航 系统就失去作用,导致导航的准确性存在一定的缺陷。
技术实现要素:
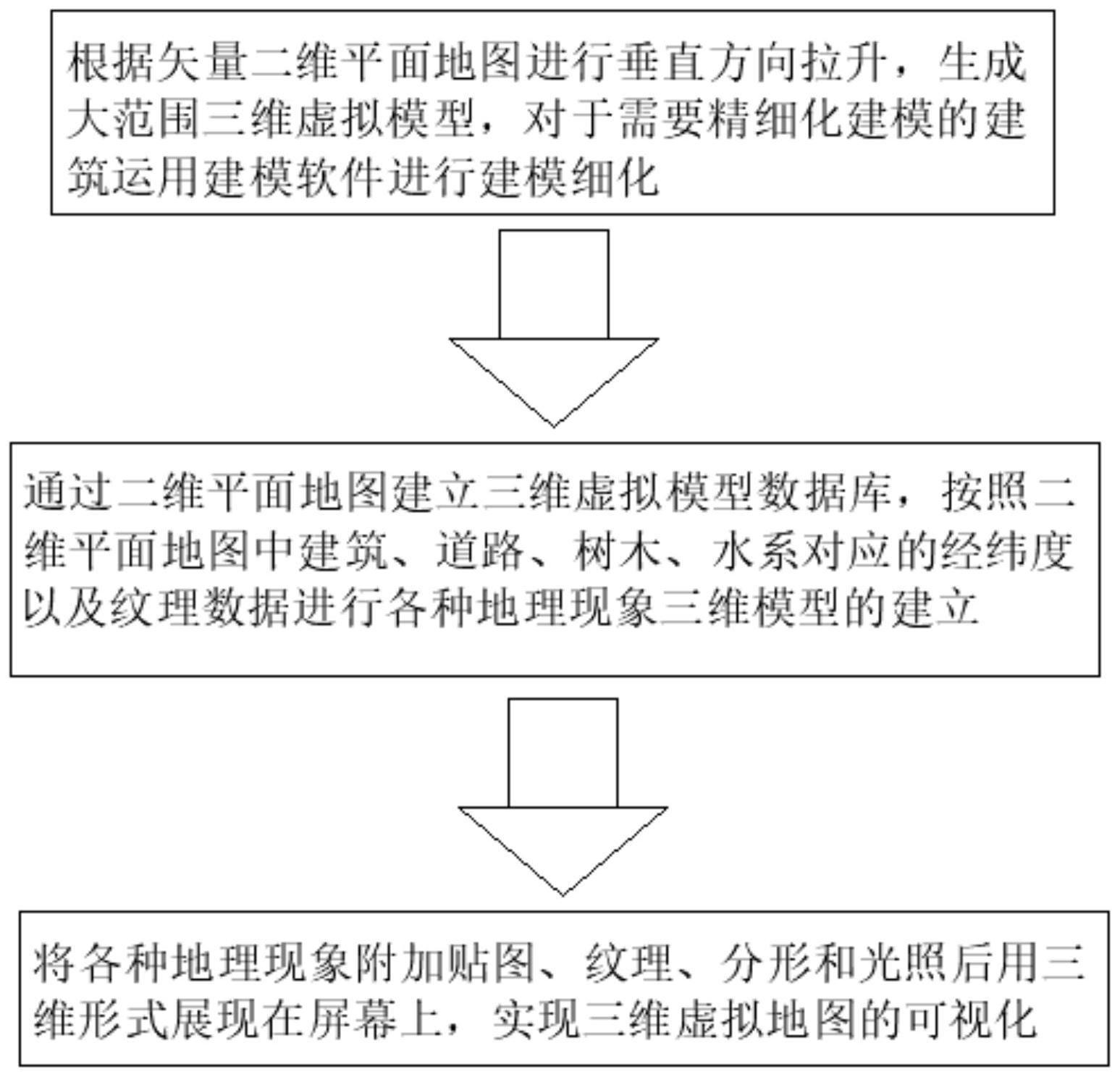
1.要解决的技术问题 针对现有技术中存在的问题,本发明的目的在于提供一种基于地理位置的三维虚 拟地图可视化引擎技术及装置,它通过黑白的贴图和纹理可以在降低三维虚拟模型数据大 小的同时不影响三维虚拟模型的辨识度,便于使用者判断方向寻找路线,同时通过实景补 全模块的设置,使用者可以先拍摄一段自身附近的视频,然后在三维实景存储装置内以使 用者的视角,读取预先存储的附近实景,相较于现有的实景模型导航,一方面使用者肉眼看 到的就是实际景象,而不是大致的景物模型,辨识度更高,提高了导航准确度,另一方面,实 际景象信息仅需即时读取即可,对于网络的依赖性较小,在使用时略过了下载景物三维模 型的过程,有效降低了数据流,加快了导航速度,提高导航效率。 2.技术方案 为解决上述问题,本发明采用如下的技术方案。 一种基于地理位置的三维虚拟地图可视化引擎技术,包括以下步骤: S1、根据矢量二维平面地图进行垂直方向拉升,生成大范围三维虚拟模型,对于需 要精细化建模的建筑运用建模软件进行建模细化; S2、通过二维平面地图建立三维虚拟模型数据库,按照二维平面地图中建筑、道 路、树木、水系对应的经纬度以及纹理数据进行各种地理现象三维模型的建立; S3、将各种地理现象附加贴图、纹理、分形和光照后用三维形式展现在屏幕上,实 3 CN 111583405 A 说 明 书 2/5 页 现三维虚拟地图的可视化。 通过黑白的贴图和纹理可以在降低三维虚拟模型数据大小的同时不影响三维虚 拟模型的辨识度,便于使用者判断方向,寻找路线,同时通过实景补全模块的设置,使用者 先拍摄一段自身附近的视频,然后可以在三维实景存储装置内以使用者的视角,读取预先 存储的附近实景,相较于现有的实景模型导航,一方面使用者肉眼看到的就是实际景象,而 不是大致的景物模型,辨识度更高,提高了导航准确度,另一方面,实际景象信息仅需即时 读取即可,对于网络的依赖性较小,在使用时略过了下载景物三维模型的过程,有效降低了 数据流,加快了导航速度,提高导航效率。 进一步的,所述S1和S2建立在二维电子地图和三维虚拟场景的双向通讯的基础 上,所述双向通讯通过空间集合的映射关系实现。 进一步的,所述S3中贴图和纹理的获取方式为:首先选取所需贴图和纹理的实景 照片,然后对该实景图片进行扫描,获得黑白底图,并将该黑白底图导入可视化引擎装置 内,形成贴图和纹理,该贴图和纹理可以存储在三维虚拟地图数据储存模块内,由于贴图和 纹理是去除了色彩信息的黑白图,因而可以有效降低其所需存储数据的大小,进而有效提 高在使用本虚拟地图时,虚拟地图反应的敏捷性,加快使用者寻找正确路线的速度,并且黑 白的贴图和纹理同样可以提高三维虚拟模型的辨识度,便于使用者判断方向,寻找路线。 进一步的,所述S1中建模软件可以为3ds Max和Sketchup中的一种或两种。 一种基于地理位置的三维虚拟地图可视化引擎装置,包括三维虚拟地图建模模 块、二维地图与三维虚拟地图双向通讯模块、三维虚拟地图数据储存模块、三维虚拟地图可 视化模块以及实景补全模块,所述三维虚拟地图建模模块与三维虚拟地图数据储存模块信 号连接,所述三维虚拟地图可视化模块与三维虚拟地图数据储存模块信号连接。 进一步的,所述实景补全模块包括安装在可视化引擎装置上的摄像头、插设在可 视化引擎装置上的三维实景存储装置以及GPS定位模块,通过摄像头,可以有效获取使用者 当前位置附近的实景,对比该实景,并在GPS定位模块的辅助下,三维实景存储装置可以以 使用者拍摄角度为视角,读取其内部预先存储的附近实景,进而再进行导航,进而有效提高 对于使用者的导航效率。 进一步的,所述三维实景存储装置内部安装有存储芯片,所述存储芯片与GPS定位 模块信号连接,所述三维实景存储装置表面安装有电子显示屏,所述三维实景存储装置一 端连接有接口,所述可视化引擎装置的一端设置有插槽,所述接口与插槽相匹配,存储芯片 内存储有360°实景视频,同时其与GPS定位模块电信连接,还能及时更新实景内实际物体的 变化,使用时,将三维实景存储装置插接安装进可视化引擎装置上,其可以对比使用者拍摄 的视频,进而读取出附近的实景视频信息,该部分实景信息并以使用者的拍摄角度导入可 视化引擎装置内,进行实景导航,相较于现有的实景导航,一方面使用者肉眼看到的就是实 际景象,而不是大致的景物模型,辨识度更高,提高了导航准确度,另一方面,实景信息仅需 要即时读取即可,对于网络的依赖性较小,在使用时略过了下载景物三维模型的过程,有效 降低了数据流,加快了导航速度。 进一步的,所述可视化引擎装置的一端开凿有两个凸形内连槽,两个所述凸形内 连槽分别位于插槽上下两侧,所述凸形内连槽内设有限位球,所述限位球外端连接有连绳, 所述连绳远离限位球的一端穿出凸形内连槽与三维实景存储装置固定连接,通过限位球和 4 CN 111583405 A 说 明 书 3/5 页 凸形内连槽可以将三维实景存储装置不论是使用还是不使用时,均能与可视化引擎装置连 接在一起,提高使用时的便利性,并且降低了三维实景存储装置丢失的情况的发生。 进一步的,所述凸形内连槽内壁固定连接有内定位座,所述内定位座的外端面设 置成弧面凹陷状,且弧面凹陷状与限位球相匹配。 进一步的,所述弧面凹陷处内壁固定连接有弧面吸附块,所述限位球为内部包裹 有磁铁块的硅橡胶,使得弧面吸附块和限位球可以相互契合并相互吸附在一起,使得三维 实景存储装置插在插槽内使用时,可以有效提高其稳定性,有效避免因限位球晃动造成的 接口和插槽处的松动,所述连绳由弹性材质制成,使得连绳在拉力下可以变长,进而便于在 不使用时,拔出三维实景存储装置并转动使其侧面贴附在可视化引擎装置上。 3.有益效果 相比于现有技术,本发明的优点在于: 本方案通过黑白的贴图和纹理,可以在降低三维虚拟模型数据大小的同时不影响 三维虚拟模型的辨识度,便于使用者判断方向,寻找路线,同时通过实景补全模块的设置, 使用者先拍摄一段自身附近的视频,然后可以在三维实景存储装置内以使用者的视角,读 取预先存储的附近实景,相较于现有的实景模型导航,一方面使用者肉眼看到的就是实际 景象,而不是大致的景物模型,辨识度更高,提高了导航准确度,另一方面,实际景象信息仅 需即时读取即可,对于网络的依赖性较小,在使用时略过了下载景物三维模型的过程,有效 降低了数据流,加快了导航速度,提高导航效率。 附图说明 图1为本发明的主要的流程框图; 图2为本发明的主要的结构框图; 图3为本发明的三维实景存储装置安装在可视化引擎装置上时的结构示意图; 图4为本发明的三维实景存储装置从可视化引擎装置上拔出时的结构示意图; 图5为本发明的三维实景存储装置不使用时连接在可视化引擎装置上的结构示意 图; 图6为图5中A处的结构示意图。 图中标号说明: 1凸形内连槽、2内定位座、3限位球、4连绳、5弧面吸附块。











