
技术摘要:
本发明的电动机控制装置具备以无传感器方式检测同步电动机的转子位置的功能,在该电动机控制装置中,防止发生转子位置的误检测,并使得在通常区域和弱磁区域双方中基于所述转子位置使同步电动机稳定的控制成为可能。电动机控制装置(1)包含:第1转子位置检测部(19),其 全部
背景技术:
作为这种电动机控制装置的一个示例,已知在专利文献1中记载的电动机控制装 置。专利文献1中记载的电动机控制装置包含:电流峰值·电角度检测部,该电流峰值·电 角度检测部基于流过同步电动机的定子线圈的电流,来检测电流峰值及电流电角度;感应 电压峰值·电角度检测部,该感应电压峰值·电角度检测部基于流过所述定子线圈的所述 电流和被施加至所述定子线圈的电压,来检测感应电压峰值和感应电压电角度;交链磁通 检测部,该交链磁通检测部基于所述感应电压峰值和所述同步电动机的转速,来检测所述 同步电动机的转子的交链磁通;第1转子位置检测部和第2转子位置检测部,该第1转子位置 检测部和第2转子位置检测部对所述同步电动机的转子位置进行检测;以及选择部,该选择 部选择所述第1转子位置检测部和所述第2转子位置检测部中的任一方。 所述第1转子位置检测部使用包含所述电流电角度、和基于所述电流峰值及[所述感应 电压电角度-所述电流电角度]而求出的第1电流相位作为变量的第1转子位置计算式,来检 测所述转子位置,所述第2转子位置检测部使用包含所述电流电角度、和基于所述电流峰值 及所述交链磁通而求出的第2电流相位作为变量的第2转子位置计算式,来检测所述转子位 置。然后,所述选择部在通常区域中选择所述第1转子位置检测部,在弱磁区域检测所述第2 转子位置检测部。具体而言,所述选择部在所述电流(所述电流峰值)在规定值以下的情况 下,选择所述第1转子位置检测部,在所述电流(所述电流峰值)超过所述规定值的情况下, 选择所述第2转子位置检测部。 现有技术文献 专利文献 专利文献1:日本专利特开2017-169329号公报
技术实现要素:
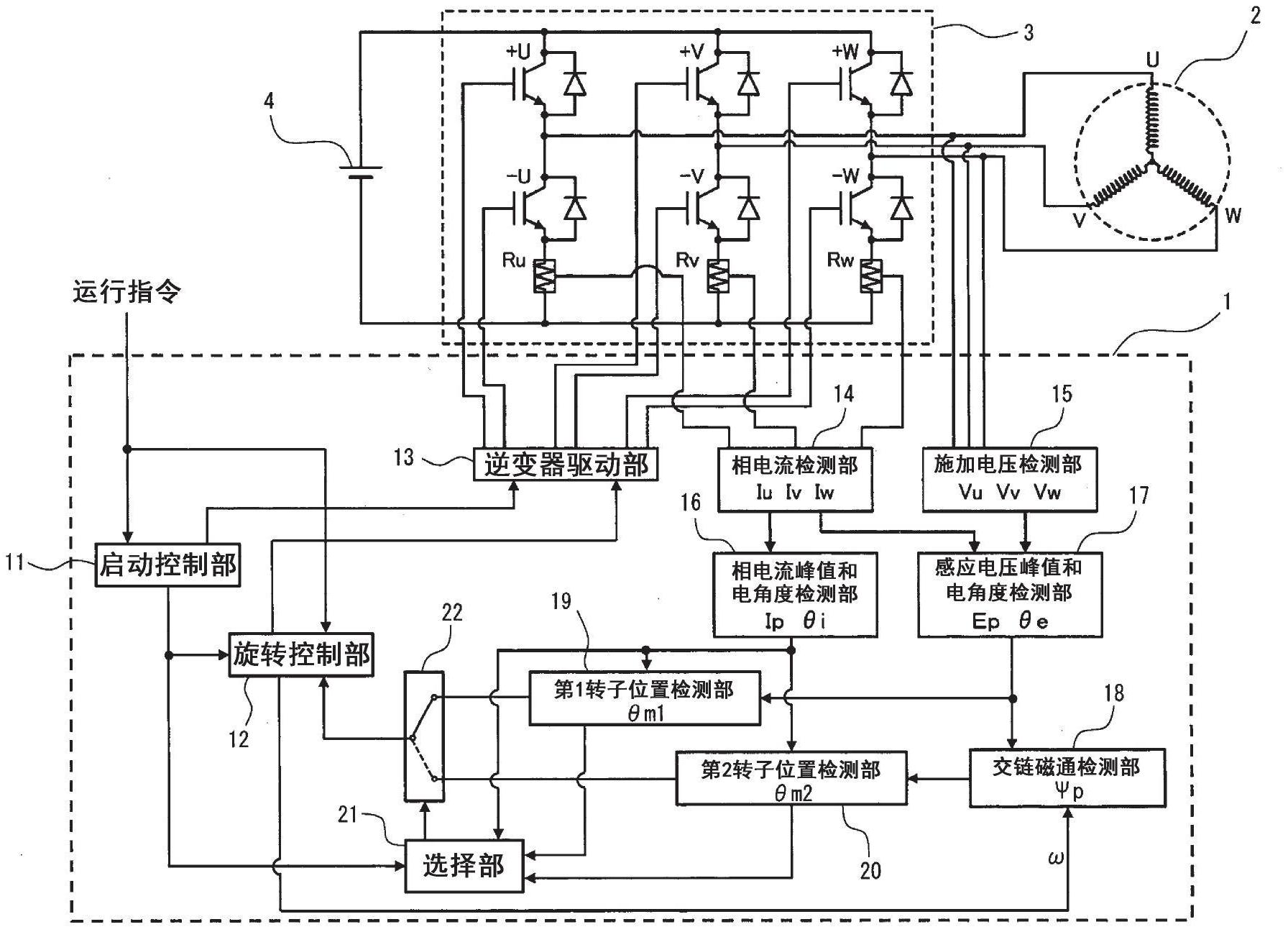
发明所要解决的技术问题 图10是示出了在上述以往的电动机控制装置中、在所述电流峰值较大的情况下的 交链磁通Ψp与电流相位β之间的关系的一个示例的图。如图10所示,在所述电流峰值较大 的情况下,在由箭头A所示出的区域中,有两个电流相位β与一个交链磁通Ψp相对应。这一 情况意味着,存在有在所述第2转子位置检测部中不能稳定求出电流相位β(即,所述第2电 流相位)这样的情况,进而存在有无法稳定检测出所述转子位置这样的情况。 因此,在仅在所述电流(所述电流峰值)超过所述规定值的情况下选择所述第2转子位 置检测部的上述以往的电动机控制装置中,可能会发生所述转子位置的误检测(包含无法 检测的状态)。所述转子位置的误检测招致所述同步电动机的控制为不安定的状态或者无 3 CN 111727555 A 说 明 书 2/10 页 法进行所述同步电动机的控制的状态,因而期望防止这一情况。 因而,本发明的目的在于,提供一种电动机控制装置,该电动机控制装置防止发生所述 转子位置的误检测,并使得在所述通常区域和所述弱磁区域双方中基于所述转子位置使所 述同步电动机稳定的控制成为可能。 解决技术问题所采用的技术方案 根据本发明的一个方面,电动机控制装置包括:电流检测部,该电流检测部检测流 过同步电动机的定子线圈的电流;施加电压检测部,该施加电压检测部检测被施加至所述 定子线圈的施加电压;电流峰值和电角度检测部,该电流峰值和电角度检测部基于由所述 电流检测部所检测出的电流,来检测电流峰值和电流电角度;感应电压峰值和电角度检测 部,该感应电压峰值和电角度检测部基于由所述电流检测部所检测出的电流、和由所述施 加电压检测部所检测出的施加电压,来检测感应电压峰值和感应电压电角度;交链磁通检 测部,该交链磁通检测部基于所述感应电压峰值、和所述同步电动机的转速,来检测所述同 步电动机的转子的交链磁通;第1转子位置检测部,该第1转子位置检测部基于所述电流电 角度、和根据所述感应电压电角度与所述电流电角度之间的差及所述电流峰值而求出的第 1电流相位,来检测所述同步电动机的转子位置;第2转子位置检测部,该第2转子位置检测 部基于所述电流电角度、和根据所述交链磁通及所述电流峰值而求出的第2电流相位,来检 测所述同步电动机的转子位置;以及选择部,该选择部基于所述电流峰值、所述第1电流相 位或所述第2电流相位,来选择所述第1转子位置检测部或所述第2转子位置检测部。 技术效果 在所述电动机控制装置中,所述选择部被构成为基于所述电流峰值和所述第1电 流相位或所述第2电流相位,来选择所述第1转子位置检测部或所述第2转子位置检测部。 即,所述选择部不仅考虑所述电流的大小,也考虑所述电流的相位,从而进行对所述第1转 子位置检测部或所述第2转子位置检测部的选择。因此,由所述选择部所进行的所述第1转 子位置检测部或所述第2转子位置检测部的选择,进一步地来说的话,通过适当进行从所述 第1转子位置检测部切换到所述第2转子位置检测部、从所述第2转子位置检测部切换到所 述第1转子位置检测部,来防止所述转子位置的误检测。其结果是,在所述通常区域和所述 弱磁区域双方中稳定且高精度地检测所述转子位置,并使得对所述同步电动机的稳定的控 制成为可能。 附图说明 图1是本发明的一个实施方式所涉及的电动机控制装置的框图。 图2是进行正弦波通电时的相电流波形图。 图3是进行正弦波通电时的感应电压波形图。 图4是转子坐标(d-q坐标)系的电动机矢量图。 图5是用于对第1转子位置检测部所使用的数据表格进行说明的图,是示出电流相位β 与(感应电压电角度θe-相电流电角度θi)之间的关系的一个示例的图。 图6是用于对第2转子位置检测部所使用的数据表格进行说明的图,是示出电流相位β 与交链磁通Ψp之间的关系的一个示例的图。 图7是示出所述第1转子位置检测部所使用的所述数据表格的一个示例的图。 4 CN 111727555 A 说 明 书 3/10 页 图8是示出所述第2转子位置检测部所使用的所述数据表格的一个示例的图。 图9是表示由选择部所执行的所述第1转子位置检测部或所述第2转子位置检测部的选 择处理的一个示例的流程图。 图10是用于对以往的电动机控制装置中的问题点进行说明的图,是示出在电流峰值较 大的情况下的电流相位β与交链磁通Ψp之间的关系的图。











