
技术摘要:
本发明公开了一种用于移动机器人的PPUUR悬架结构,由机身、两个摆杆、两个第一连杆、两个第二连杆、四个万向节、一个第一移动关节和两个第二移动关节组成。所述机身上部和所述第一移动关节相连;所述第一移动关节和所述第一连杆通过所述第二移动关节相连;所述第一连杆 全部
背景技术:
随着机器人技术的发展,移动机器人由于其良好的机动性和越障能力,能够替代 人类在特殊环境中执行特种任务,在军事侦察、消防救援等领域具有广泛的应用前景。所以 要求移动机器人在崎岖地形拥有较好的稳定性和越障能力。 目前,移动机器人的悬架结构多模仿汽车采用减震簧,结构复杂度高且占用空间 大,越障能力不足。如申请号CN201711310486.9的发明专利中的一种铰连接的机器人平衡 结构,采用了相对车身转动的前后轮悬架结构。但是相对于整体结构趋向小型化的移动机 器人来说,前后轮的悬架转动范围较小,越障能力有限。
技术实现要素:
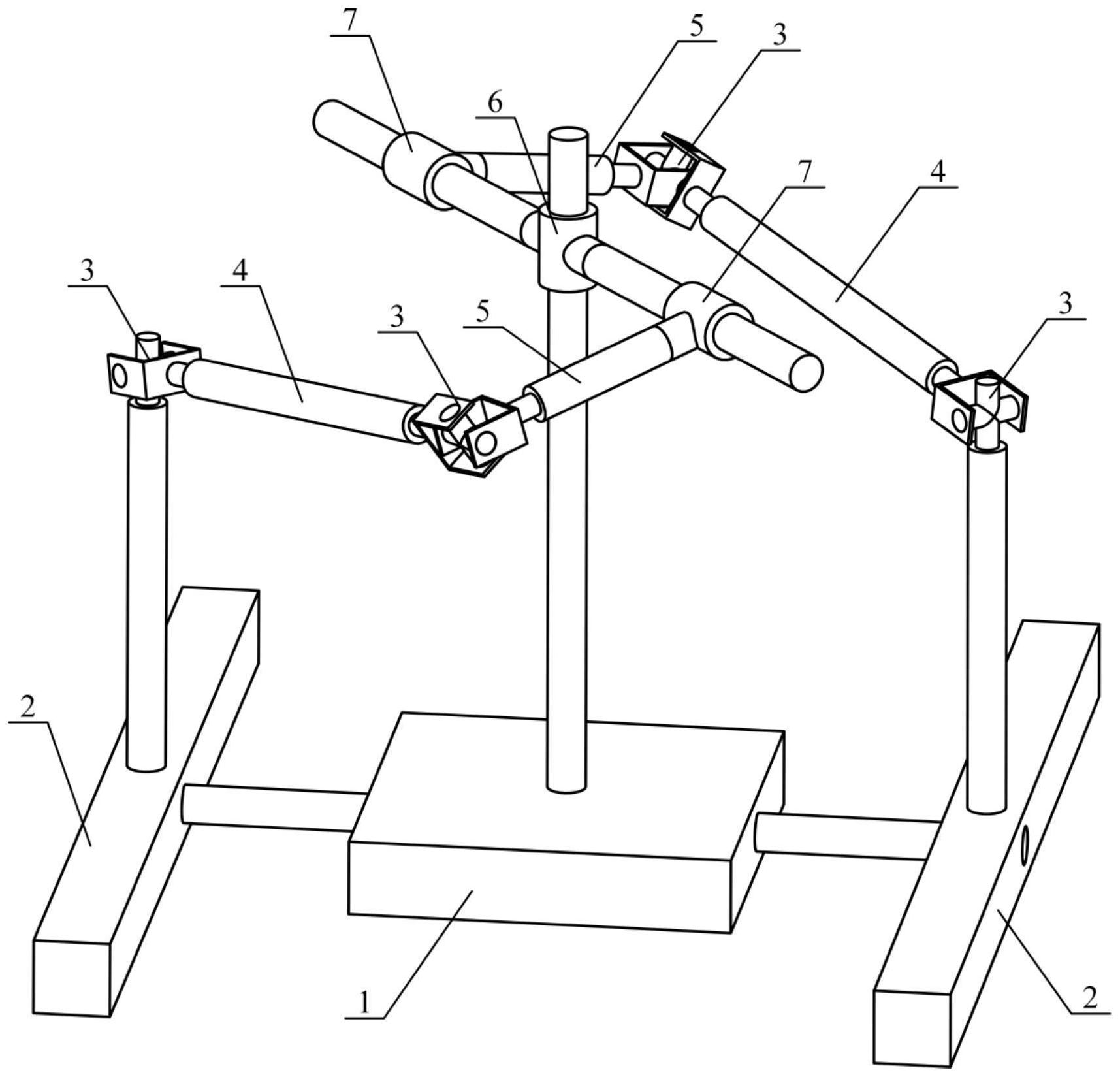
本发明的目的在于克服现有移动机器人悬架结构在越障能力、稳定性等方面的不 足,提供一种具有良好越障能力、地形适应性和稳定性的用于移动机器人的PPUUR悬架结 构。 本发明的一种用于移动机器人的PPUUR悬架结构,由机身、两个摆杆、两个第一连 杆、两个第二连杆、四个万向节、一个第一移动关节和两个第二移动关节组成。 本发明的一种用于移动机器人的PPUUR悬架结构整体呈中心对称。机身上部和第 一移动关节相连,第一移动关节的滑块可以相对于机身上下移动。该第一移动关节的滑块 又和两个第二移动关节相连。而且这两个第二移动关节的导柱呈180°对称连接到第一移动 关节的滑块上。第一连杆和第二移动关节的滑块相固连。第一连杆和第二连杆、第二连杆和 摆杆之间分别通过万向节连接。机身左右两侧有伸出轴端用于和摆杆相连,即摆杆和机身 之间可以相对转动。 本发明的一种用于移动机器人的PPUUR悬架结构,两侧摆杆相对于机身的运动相 反。当移动机器人经过崎岖地面时,两侧车轮与地面的接触点不在同一平面内,从而使两侧 摆杆产生被动的摆动,带动悬架机构运动。两侧的摆杆之间形成一定的角度,而本发明的 PPUUR悬架结构对两侧摆杆摆角有均化效果,可以使中间的机身的摆角较小,从而提高机身 的稳定性,减小机身的波动。 本发明的一种用于移动机器人的PPUUR悬架结构具有以下有益效果: 1.结构简单,摆杆的摆角范围较大,可以使移动机器人适应崎岖地形,具有较强的 越障能力; 2.机身的俯仰波动较小、稳定性较高,可以有效防止因车轮与地面接触不稳或部 分车轮悬空而导致的倾覆。 说明书附图 图1是本发明的一种用于移动机器人的PPUUR悬架结构的整体结构示意图。 3 CN 111547150 A 说 明 书 2/2 页 图2是本发明的一种用于移动机器人的PPUUR悬架结构中万向节的结构示意图。 图3是本发明的一种用于移动机器人的PPUUR悬架结构中移动关节的结构示意图。 附图标记: 1、机身;2、摆杆;3、万向节;4、第二连杆;5、第一连杆;6、第一移动关节;7、第二移 动关节;8、十字轴;9、万向节叉;10、导柱;11、滑块。 最佳实施方式 为能进一步了解本发明的











