
技术摘要:
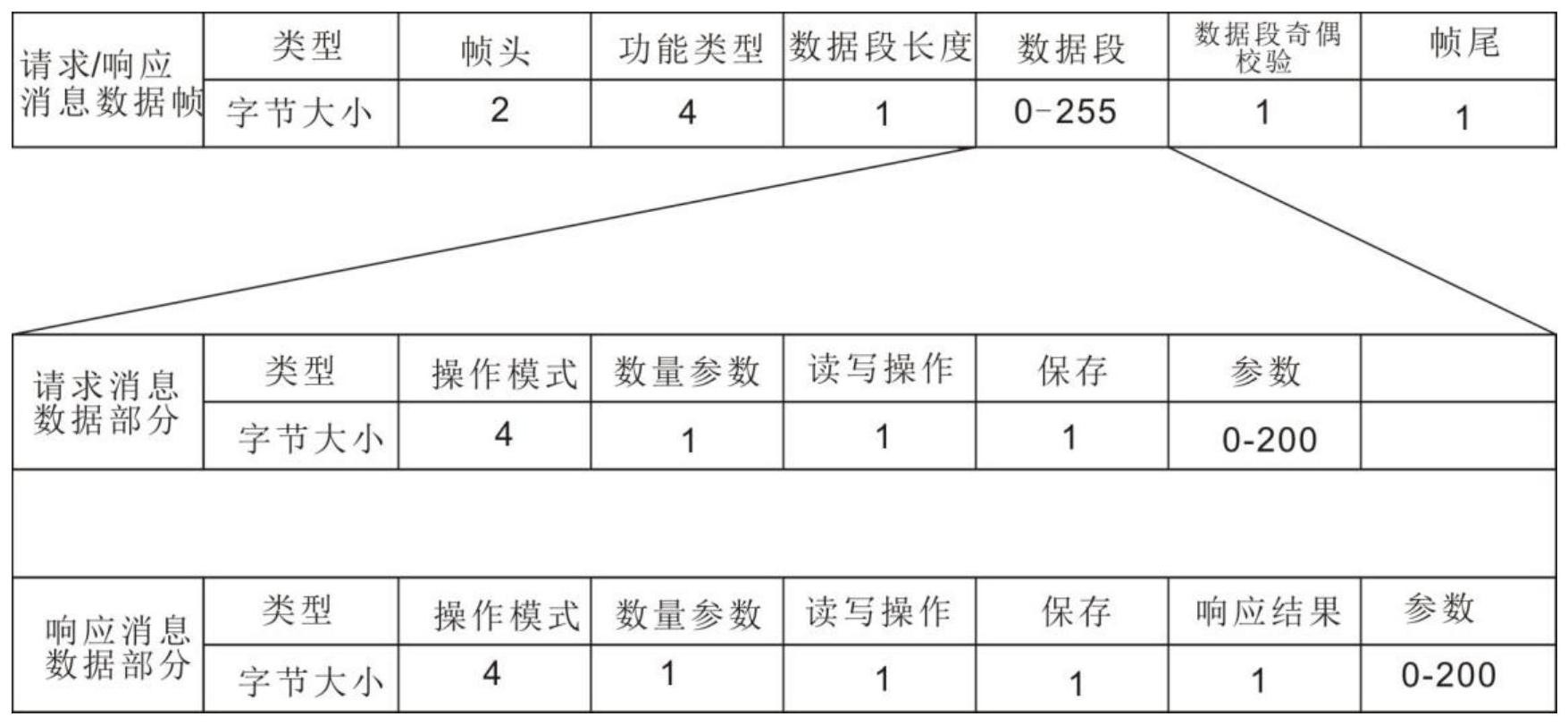
本发明公开了一种外骨骼机器人通讯协议、人机交互系统及多平台交互软件,该通信协议的数据帧结构由六部分组成,分别为帧头、功能类型、数据段长度、数据段、数据段奇偶校验和帧尾;该人机交互系统至少包括应用于客户端的操作系统及实现外骨骼机器人控制端与客户端操作 全部
背景技术:
外骨骼机器人技术是融合传感、控制、信息、融合、移动计算,为作为操作者的人提 供一种可穿戴的机械机构的综合技术。其同时主要指套在人体外面的机器人,也称“可穿戴 的机器人”。外骨骼机器人作为一种新兴技术,主要有康复、助行、增强的用处,针对三种用 处开发出了康复型外骨骼机器人、辅助型外骨骼机器人和增强型外骨骼机器人。其中,康复 型外骨骼机器人主要是给医院里面的偏瘫患者使用的,帮助他们做重复性的康复运动动 作,从而达到辅助治疗师,进行康复训练的目的;辅助型外骨骼机器人主要是给脊髓损伤等 患者使用,帮助这类患者实现行走功能;增强型外骨骼机器人主要是应用于工业或是军事, 实现对人体运动能力的增强。 在以上三种形式的外骨骼机器人当中,辅助型外骨骼机器人主要是给脊髓损伤等 患者使用,而脊髓损伤大概率是一种无法恢复的损伤,所以做康复运动已经对于恢复神经 系统没有什么太大的意义,传统上,针对这类患者的移动需求主要是提供了轮椅这种解决 办法,但是,由于长时间坐在轮椅上存在各种各样的缺点,比如会导致各种并发症或是导致 肌肉萎缩等,因此,在开发外骨骼机器人帮助这类患者实现行走功能的同时,对如何更专业 的实现外骨骼机器人的运动控制尤为重要。 为了实现对外骨骼机器人更专业的运动控制,人机交互技术就成为了解决这一问 题的必备技术。人机交互技术是指通过计算机输入、输出设备,以有效的方式实现人与计算 机对话的技术。目前有多家国内外的外骨骼机器人公司针对外骨骼机器人的运动控制提供 了人机交互方案,例如采用手表进行控制,在手表上设置若干指令按钮,实现外骨骼机器人 的基本操作,同时通过手表上若干个LED灯显示当前外骨骼机器人的状态;再如,在外骨骼 机器人的背包上设置一个液晶显示器,通过人手点击操作,配置机器人参数完成外骨骼机 器人控制;又或者预先设定外骨骼机器人参数,存储在机器人程序当中,通过外骨骼机器人 本身的力传感器进行人机交互等。这些方式均存在诸多缺陷,例如: 1 .部分实现方式如采用背部控制面板控制或遥控手柄控制,只适合操作者使用, 不方便穿戴者使用操作;而简单的操作界面/按钮又无法实现穿戴者进行机器人状态数据 查看; 2.无实时数据更新与显示; 3.部分操作系统采用的是自研系统,程序不跨平台,不具备软件的可移植性,不方 便用户自己安装和使用; 4.没有统一的数据管理系统,无法进行统一的数据管理,实现精细化操作。 因此,针对现有技术的缺陷,本领域的技术人员致力于开发一种外骨骼机器人的 通讯协议及基于该通讯协议的人机交互系统,以实现对专业化、精细化的外骨骼机器人操 3 CN 111600891 A 说 明 书 2/8 页 作控制。
技术实现要素:
本发明的目的是为了提供一种外骨骼机器人的通讯协议及人机交互系统,以解决











