
技术摘要:
本发明公开了一种基于双投射器的双目立体匹配方法、装置、介质和设备,属于三维成像与三维重建领域,其中,方法的实现包括:基于第一投射器,获取第一组双目图像对,并基于第一组双目图像对进行立体匹配,生成第一视差图;基于第二投射器,获取第二组双目图像对,并基 全部
背景技术:
基于双目立体匹配原理的主动双目立体相机已广泛应用于机器人引导与定位抓 取,通过主动投射纹理图案,可解决因被测场景纹理单一造成的点云缺失问题。在传统主动 双目立体相机结构形式中,2D相机分别安装在基线两侧,主动纹理投射器安装在基线中心 位置,然而在特定场景下,如图1所示,如场景中包括类似镜面反射表面的物体时,会产生眩 光,造成2D图像过曝,或同一物体在两个2D相机中一个过曝而另一个曝光不足图像过暗,以 上问题均可定义为因被测物反光造成匹配失败,进而点云缺失。
技术实现要素:
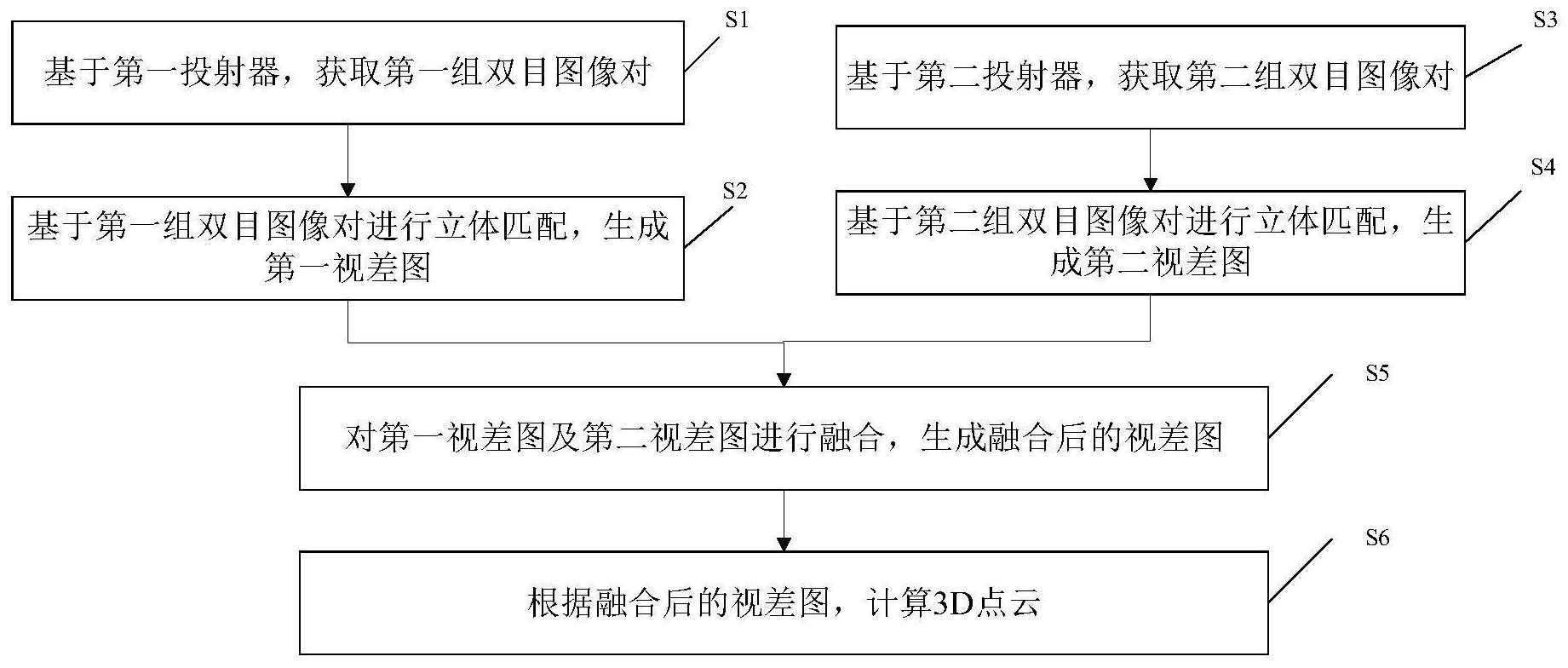
针对现有技术的以上缺陷或改进需求,本发明提出了一种基于双投射器的双目立 体匹配方法、装置、介质和设备,由此解决传统主动双目立体相机因被测物反光引起的点云 缺失的技术问题。 为实现上述目的,按照本发明的一个方面,提供了一种基于双投射器的双目立体 匹配方法,应用于双投射器,所述双投射器包括第一投射器和第二投射器,所述方法包括: 基于所述第一投射器,获取第一组双目图像对,并基于所述第一组双目图像对进 行立体匹配,生成第一视差图; 基于所述第二投射器,获取第二组双目图像对,并基于所述第二组双目图像对进 行立体匹配,生成第二视差图; 对所述第一视差图及所述第二视差图进行融合,生成融合后的视差图,根据所述 融合后的视差图得到3D点云。 优选地,所述基于所述第一投射器,获取第一组双目图像对,包括: 基于所述第一投射器,通过两个相机获取第一组双目图像对; 所述基于所述第二投射器,获取第二组双目图像对,包括: 基于所述第二投射器,通过所述两个相机获取第二组双目图像对。 优选地,所述基于所述第一组双目图像对进行立体匹配,生成第一视差图,包括: 选取所述第一组双目图像对中两幅图像的对应子区域,对选取的子区域进行相关 度匹配生成第一视差图,其中,若匹配成功,则所述第一视差图中对应像素点的视差有效, 若匹配失败,则所述第一视差图中对应像素点的视差为无效值; 所述基于所述第二组双目图像对进行立体匹配,生成第二视差图,包括: 选取所述第二组双目图像对中两幅图像的对应子区域,对选取的子区域进行相关 度匹配生成第二视差图,其中,若匹配成功,则所述第二视差图中对应像素点的视差有效, 若匹配失败,则所述第二视差图中对应像素点的视差为无效值。 4 CN 111601097 A 说 明 书 2/7 页 优选地,所述对所述第一视差图及所述第二视差图进行融合,生成融合后的视差 图,包括: 基于所述第一视差图中待融合的像素点的视差值与所述第二视差图中待融合的 像素点的视差值,得到融合后的视差值,进而得到融合后的视差图,其中,所述第二视差图 中待融合的像素点与所述第一视差图中待融合的像素点对应。 优选地,所述基于所述第一视差图中待融合的像素点的视差值与所述第二视差图 中待融合的像素点的视差值,得到融合后的视差值,包括: 判断所述第一视差图中待融合的第一像素点对应的第一视差值是否为有效值; 判断所述第二视差图中待融合的第二像素点对应的第二视差值是否为有效值,所 述第二像素点与所述第一像素点对应; 若所述第一视差值及所述第二视差值均为有效值,则将所述第一视差值与所述第 二视差值和的平均值作为融合后的视差值;若所述第一视差值为有效值且所述第二视差值 为无效值,则将所述第一视差值作为融合后的视差值;若所述第一视差值为无效值且所述 第二视差值为有效值,则将所述第二视差值作为融合后的视差值;若所述第一视差值及所 述第二视差值均为无效值,则融合后的视差值为无效值。 按照本发明的另一个方面,提供了一种基于双投射器的双目立体匹配装置,应用 于双投射器,所述双投射器包括第一投射器和第二投射器,所述装置包括: 第一图像获取模块,用于基于所述第一投射器,获取第一组双目图像对; 第一视差图生成模块,用于基于所述第一组双目图像对进行立体匹配,生成第一 视差图; 第二图像获取模块,用于基于所述第二投射器,获取第二组双目图像对; 第二视差图生成模块,用于基于所述第二组双目图像对进行立体匹配,生成第二 视差图; 融合模块,用于对所述第一视差图及所述第二视差图进行融合,生成融合后的视 差图,根据所述融合后的视差图得到3D点云。 优选地,所述第一图像获取模块,具体用于触发所述第一投射器,在所述第一投射 器开启时,触发两个相机获取第一组双目图像对,然后关闭所述第一投射器; 所述第二图像获取模块,具体用于触发所述第二投射器,在所述第二投射器开启 时,触发两个相机获取第二组双目图像对,然后关闭所述第二投射器。 优选地,所述第一视差图生成模块,具体用于选取所述第一组双目图像对中两幅 图像的对应子区域,对选取的子区域进行相关度匹配生成第一视差图,其中,若匹配成功, 则所述第一视差图中对应像素点的视差有效,若匹配失败,则所述第一视差图中对应像素 点的视差为无效值; 所述第二视差图生成模块,具体用于选取所述第二组双目图像对中两幅图像的对 应子区域,对选取的子区域进行相关度匹配生成第二视差图,其中,若匹配成功,则所述第 二视差图中对应像素点的视差有效,若匹配失败,则所述第二视差图中对应像素点的视差 为无效值。 优选地,所述融合模块,具体用于基于所述第一视差图中待融合的像素点的视差 值与所述第二视差图中待融合的像素点的视差值,得到融合后的视差值,进而得到融合后 5 CN 111601097 A 说 明 书 3/7 页 的视差图,其中,所述第二视差图中待融合的像素点与所述第一视差图中待融合的像素点 对应。 优选地,所述融合模块,包括: 第一判断模块,用于判断所述第一视差图中待融合的第一像素点对应的第一视差 值是否为有效值; 第二判断模块,用于判断所述第二视差图中待融合的第二像素点对应的第二视差 值是否为有效值,所述第二像素点与所述第一像素点对应; 判断处理模块,用于在所述第一视差值及所述第二视差值均为有效值时,将所述 第一视差值与所述第二视差值和的平均值作为融合后的视差值;在所述第一视差值为有效 值且所述第二视差值为无效值时,将所述第一视差值作为融合后的视差值;在所述第一视 差值为无效值且所述第二视差值为有效值时,将所述第二视差值作为融合后的视差值;在 所述第一视差值及所述第二视差值均为无效值时,融合后的视差值为无效值。 按照本发明的另一个方面,提供了一种计算机设备,包括存储器、处理器以及存储 在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上 述任一项所述方法的步骤。 按照本发明的另一个方面,提供了一种计算机可读存储介质,其上存储有计算机 程序,所述计算机程序被处理器执行时实现上述任一项所述方法的步骤。 总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有 益效果:本发明可有效克服传统主动双目立体相机因被测物表面反光引起的点云缺失问 题,提高了点云的完整性,双投射器多次匹配可进一步提高点云精度。 附图说明 图1是本发明实施例提供的一种主动双目立体相机获取的被测物反光图片; 图2是本发明实施例提供的一种基于传统单投射双目立体匹配和本发明中涉及的 双投射双目立体匹配生成的点云对比图,其中,(a)为基于传统单投射双目立体匹配生成的 点云,(b)为双投射双目立体匹配生成的点云; 图3是本发明实施例提供的一种双投射器结构图,其中,(a)为总体结构图,(b)为 主视图; 图4是本发明实施例提供的一种基于双投射器的双目立体匹配方法的流程图; 图5是本发明实施例提供的一种视差图融合流程图; 图6是本发明实施例提供的一种基于双投射器的双目立体匹配装置的结构示意 图; 图7是本发明实施例提供的一种计算机设备结构示意图。











