
技术摘要:
一种工业车辆和操作用于工业车辆的操作者存在探测器的方法,工业车辆装配有操作者存在探测器,包括:可选的第一探测器,布置且构造为探测位于操作室门槛之上的物体;第二探测器,布置且构造为,当左下肢位于操作室内时,探测操作者的左下肢;以及第三探测器,布置且构 全部
背景技术:
当驾驶特定类型的工业车辆时,例如端驾式举升车(end-rider lift trucks)、前 移式叉车、龙门式吊运车、站端控制车(standup end control trucks)、中心驾式卡车 (center rider trucks)、拖拉车(tugger trucks)和拣选车(order picker trucks)中的 一种或多种模型,操作者是站立的。依据联邦法律,这些工业车辆的操作者需要他们的雇主 对他们有严格的训练、认证和再认证。这种训练包括操作者在使用期间将双脚和双腿都保 持在操作室内的指令。在下文,腿及其相连接的脚的组合被称为“下肢”。已经发展出多种系 统和方法以在工业车辆处于使用中的同时增强这种操作者训练。
技术实现要素:
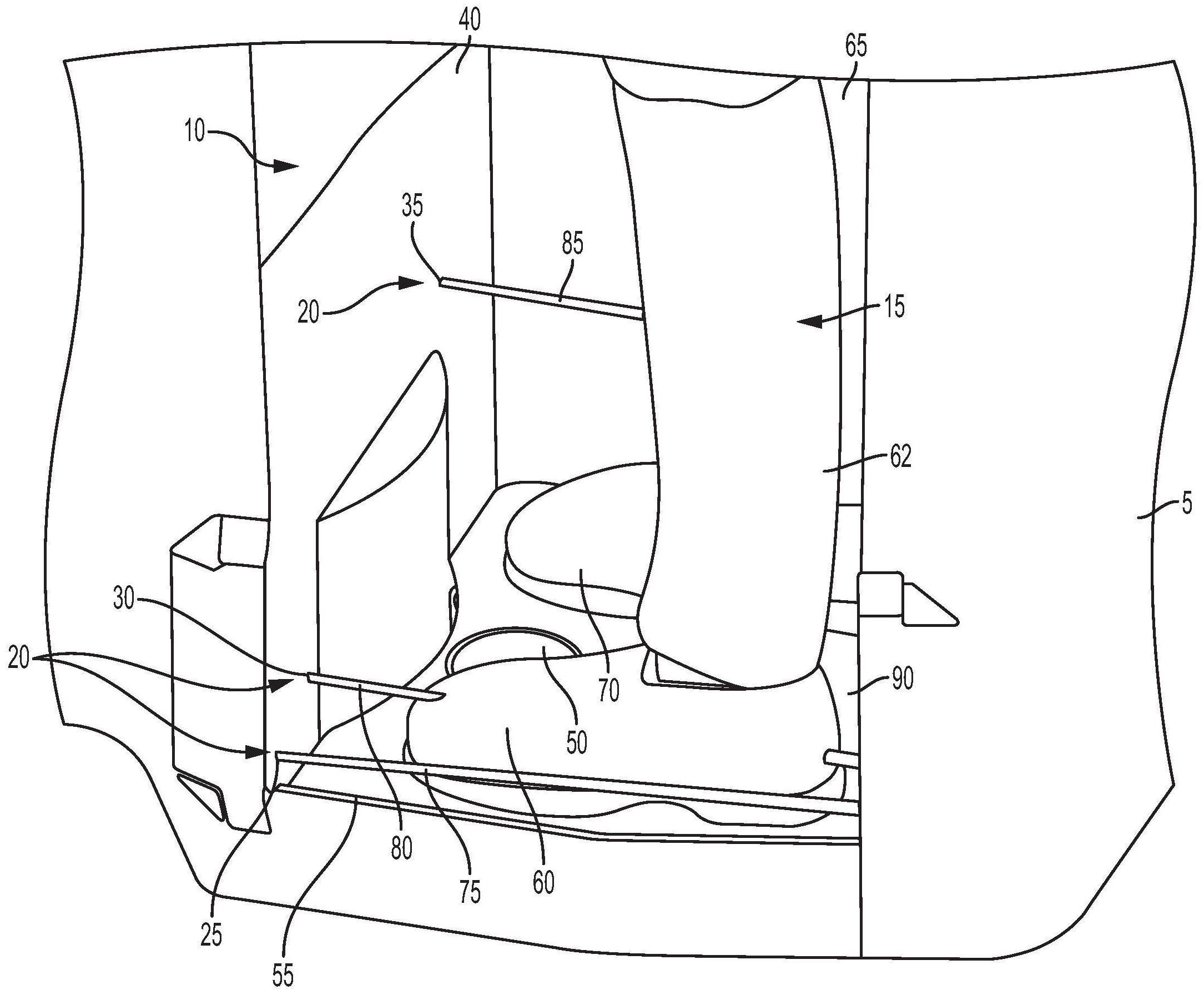
公开的系统和方法优选地以与驾驶者训练一致的方式探测何时操作者正确站立 或未正确站立在操作室内。在优选的实施方式中,基于操作者在驾驶平台上的位置是否与 操作者接受的训练一致,整个车辆、或车辆的一个或多个功能可被允许、限制或不允许。例 如,当与这种车辆相关的探测装置或系统探测到没有操作者在驾驶平台上或者驾驶平台上 的驾驶者未以预定形态以双脚站立,端驾式举升车的行驶功能被无效;或者多个功能可被 无效,例如行驶功能和举升功能。 依照一个实施方式,装配有操作者存在探测器的车辆包括:第一探测器或第一组 探测器,布置且构造为探测位于操作室的门槛平面之上或之中的物体;第二探测器或第二 组探测器,布置且构造为,当左下肢位于操作室内时探测操作者的左下肢;以及第三探测器 或第三组探测器,布置且构造为,当右下肢位于操作室内时探测操作者的右下肢。第二探测 器或第二组探测器以及第三探测器或第三组探测器布置使得操作者不能使第二探测器或 第二组探测器同时探测到左下肢和右下肢二者,且不能使第三探测器或第三组探测器同时 探测到右下肢和左下肢二者。 附图说明 图1是装配有操作者存在传感器的示例性工业车辆的后正交视图,其中操作者在 操作室内。 4 CN 111572550 A 说 明 书 2/8 页 图2是图1的工业车辆的俯视图,没有操作者在操作室内。 图3是图1的工业车辆的示意俯视图,示出了与三个探测器相关联的探测区域的相 对水平位移。虽然未示出,但探测区域可沿相同方向或者从操作室任一侧沿交替方向传播。 图4a是图1的工业车辆的后示意视图,示出了与二个探测器相关联的探测区域的 相对竖直位移。 图4b是图1的工业车辆的后示意视图,示出了与一个探测器相关联的探测区域的 相对竖直位置。 图5是装配有操作者存在传感器的另一示例性工业车辆的往下看的后视图,其中 操作者在操作室内。 图6是图5的工业车辆的后视图,其中操作者在操作室内。 图7是图5的工业车辆的俯视图,没有操作者在操作室内。 图8是图5的工业车辆的示意俯视图,示出了与三个探测器的探测区域相关联的相 对水平位移。虽然未示出,但探测区域可沿相同方向或者从操作室任一侧沿交替方向传播。 图9a是图5的工业车辆的后示意视图,示出了与二个探测器相关联的探测区域的 相对竖直位移。 图9b是图5的工业车辆的后示意视图,示出了与一个探测器相关联的探测区域的 相对竖直位置。 图10是示例性方法的流程图。











