
技术摘要:
本发明实施例提供一种施肥方法及系统,该方法包括:根据传感器预设组合模式、每一传感器在目标农机上的安装角度、当前追肥行的宽度、传感器安装间距和目标农作物的高度,获取每一传感器在所述目标农机上的安装高度;对每一传感器采集的数据进行卡尔曼滤波处理,获取最 全部
背景技术:
小麦种植面积仅次于水稻和玉米,在我国粮食生产种植中占有举足轻重的地位。 小麦生产对我国的粮食安全及小麦种植区增加农业产值与提高农民收入有直接影响。2018 年我国小麦播种面积为24266.19千公顷,总产量为13144.05万吨,与2005年产量相比增长 25.87%,播种面积占全国粮食作物的22%。化肥作为粮食增产的决定因子促进了农作物产 量的增长,联合国粮食及农业组织(FAD)统计数据表明,化肥对农作物的增产效果最大约占 到40%-60%。 据统计,1996-2009年间我国农田化肥的使用量增长了41.2%,而对应的粮食总产 量的增长率只有5.1%,源源不断的化肥投入并没有带来粮食产量的稳定增长,造成这种结 果的重要原因是由于化肥投入过多、肥料利用率降低而导致增产效应的下降。2015年中国 农业部表示,目前中国化肥平均使用量较高,每亩作物平均化肥使用量达到21.9kg,远高于 每亩8kg的世界平均水平,是美国的2.6倍,欧盟的2.5倍。更严重的是化肥施用过量,引发了 环境问题,许多地区农作物出现倒伏减产,土壤酸化和板结问题日益严重。 目前我国常用的小麦追肥精准对行技术大致可以分为机器视觉导航、卫星导航两 类。机器视觉导航通过图像传感器收集图像信息,提取麦苗行中心线。但是机器视觉导航成 本高,而且在非结构化的复杂环境,视觉传感器容易受到环境噪音信号的影响和作物缺失 造成图像信息缺失,导致存在实时性问题,系统适应性也较差。 目前基于卫星定位导航的应用已经普及,但在卫星定位信号微弱或地图信息不完 整的场所如偏远农场、室内定位导航就无法基于卫星定位信号。卫星导航的作业精度很容 易受到外部环境因素的影响,包括地理位置、作业地面起伏程度等,可靠性低,实施成本高, 安装调试复杂等问题。 小麦属于密植作物,目前小麦追肥以人工为主,机械施肥仅占主要农作物种植面 积的30%左右,现有的追肥机械以撒施为主,撒肥后不及时灌溉会导致化肥利用率降低,而 追肥机械的开沟器进地,容易损伤小麦根部及幼苗。追肥机械作业过程中因对行精度低,导 致开沟器损伤麦苗及根部等问题。 小麦苗根部损伤易造成麦苗根部悬空、水分、养分缺乏、导致苗稀、苗黄、苗枯死等 现象,造成小麦产量下降,长此以往致使土壤板结、土地酸化,引起环境和水体的污染。 因此,亟需一种对农作物施肥时进行精准对行的方法。
技术实现要素:
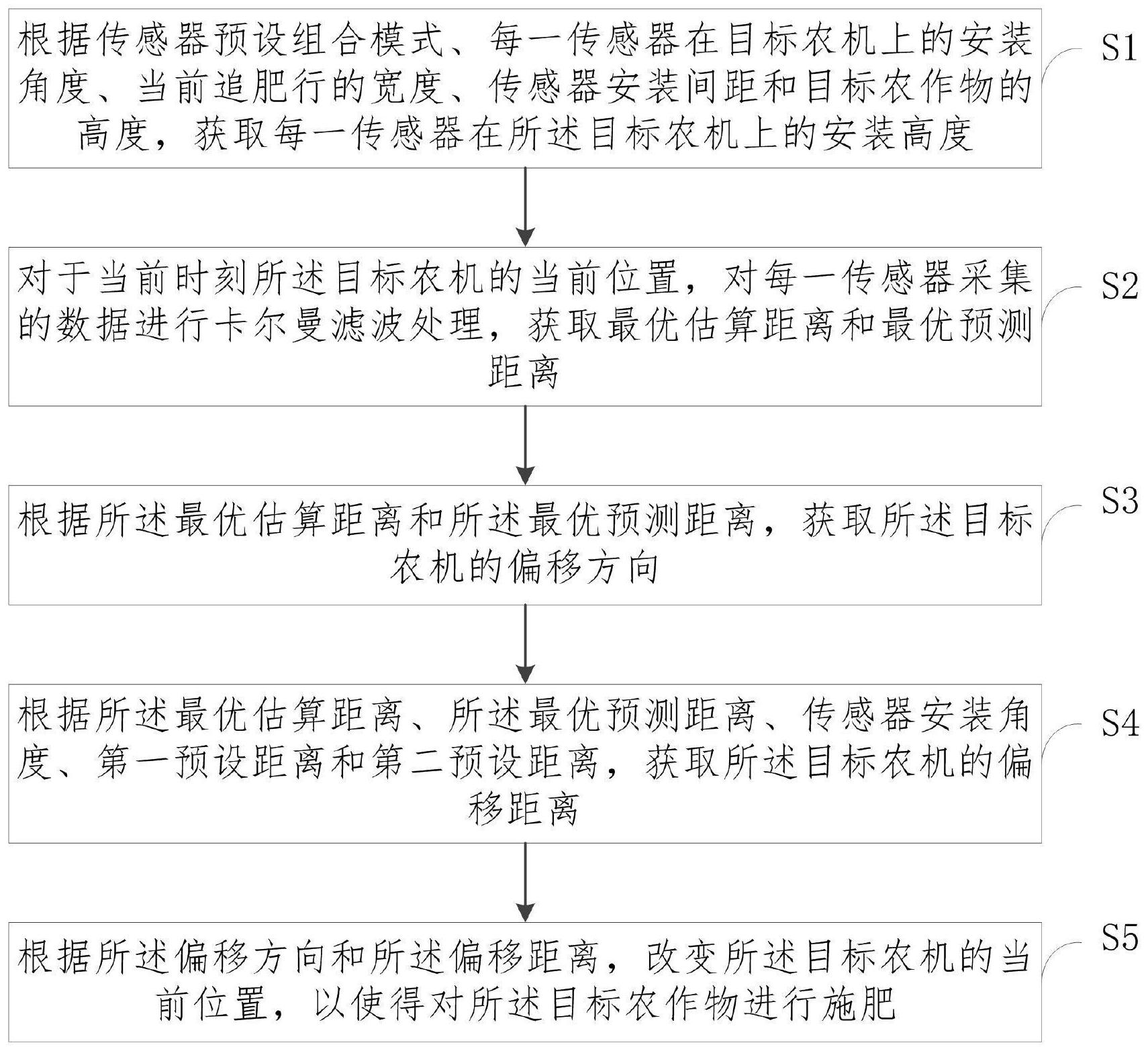
为了解决上述问题,本发明实施例提供一种施肥方法及系统。 第一方面,本发明实施例提供一种施肥方法,包括: 根据传感器预设组合模式、每一传感器在目标农机上的安装角度、当前追肥行的 5 CN 111587647 A 说 明 书 2/12 页 宽度、传感器安装间距和目标农作物的高度,获取每一传感器在所述目标农机上的安装高 度; 对于当前时刻所述目标农机的当前位置,对每一传感器采集的数据进行卡尔曼滤 波处理,获取最优估算距离和最优预测距离; 根据所述最优估算距离和所述最优预测距离,获取所述目标农机的偏移方向; 根据所述最优估算距离、所述最优预测距离、传感器安装角度、第一预设距离和第 二预设距离,获取所述目标农机的偏移距离; 根据所述偏移方向和所述偏移距离,改变所述目标农机的当前位置,以使得对所 述目标农作物进行施肥。 优选地,所述根据传感器预设组合模式、每一传感器在目标农机上的安装角度、当 前追肥行的宽度、传感器安装间距和目标农作物的高度,获取每一传感器在所述目标农机 上的安装高度,具体包括: 所述目标农机上安装有第一传感器、第二传感器、第三传感器和第四传感器,所述 第一传感器和所述第二传感器均安装在所述目标农机前轴中点的一侧,所述第三传感器和 所述第四传感器均安装在所述目标农机前轴中点的另一侧,所述第一传感器、所述第四传 感器与所述目标农机前轴中点的距离相等,所述第二传感器、所述第三传感器与所述目标 农机前轴中点的距离相等,所有传感器的安装高度相同; 若所述传感器预设组合模式为行边缘交叉模式,所有传感器的安装角度相同,所 述行边缘交叉组合模式具体为所述第一传感器扫描所述当前追肥行的一边、所述第二传感 器扫描所述当前追肥行的相邻追肥行,所述第三传感器扫描所述当前追肥行的另一相邻追 肥行,所述第四传感器扫描所述当前追肥行的另一边; 根据如下公式计算每一传感器的安装高度: 其中,H表示所述第一传感器的安装高度,x表示所述当前追肥行的宽度,w表示所 述第一传感器和所述第二传感器的安装间距,θ表示所述第一传感器的安装角度,h表示所 述目标农作物的高度。 优选地,所述根据传感器预设组合模式、每一传感器在目标农机上的安装角度、当 前追肥行的宽度、传感器安装间距和目标农作物的高度,获取每一传感器在所述目标农机 上的安装高度,具体包括: 所述目标农机上安装有第一传感器、第二传感器、第三传感器和第四传感器,所述 第一传感器和所述第二传感器均安装在所述目标农机前轴中点的一侧,所述第三传感器和 所述第四传感器均安装在所述目标农机前轴中点的另一侧,所述第一传感器、所述第四传 感器与所述目标农机前轴中点的距离相等,所述第二传感器、所述第三传感器与所述目标 农机前轴中点的距离相等,所有传感器的安装高度相同; 若所述传感器预设组合模式为边缘校正模式,所述行边缘校正组合模式具体为所 述第一传感器以预设角度扫描所述当前追肥行的相邻追肥行、所述第二传感器垂直扫描所 述当前追肥行的一边,所述第三传感器垂直扫描所述当前追肥行的另一边,所述第四传感 器以所述预设角度扫描所述当前追肥行的另一相邻追肥行; 6 CN 111587647 A 说 明 书 3/12 页 根据如下公式计算每一传感器的安装高度: H=cotθ×(x-w) h, 其中,H表示所述第一传感器的安装高度,x表示所述当前追肥行的宽度,w表示所 述第一传感器和所述第二传感器的安装间距,θ表示所述第一传感器的安装角度,h表示所 述目标农作物的高度。 优选地,所述根据传感器预设组合模式、每一传感器在目标农机上的安装角度、当 前追肥行的宽度、传感器安装间距和目标农作物的高度,获取每一传感器在所述目标农机 上的安装高度,具体包括: 所述目标农机上安装有第一传感器、第二传感器、第三传感器和第四传感器,所述 第一传感器和所述第二传感器均安装在所述目标农机前轴中点的一侧,所述第三传感器和 所述第四传感器均安装在所述目标农机前轴中点的另一侧,所述第一传感器、所述第四传 感器与所述目标农机前轴中点的距离相等,所述第二传感器、所述第三传感器与所述目标 农机前轴中点的距离相等,所有传感器的安装高度相同; 若所述传感器预设组合模式为并行组合模式,所述并行组合模式具体为所述第一 传感器垂直扫描所述当前追肥行的相邻追肥行,所述第二传感器垂直扫描所述当前追肥行 的一边,所述第三传感器垂直扫描所述当前追肥行的另一边,所述第四传感器垂直扫描所 述当前追肥行的另一相邻追肥行; 根据预设高度确定所述安装高度。 优选地,所述根据所述最优估算距离、所述最优预测距离、传感器安装角度、第一 预设距离和第二预设距离,获取所述目标农机的偏移距离,具体包括: 其中,d表示所述偏移距离,θ表示所述传感器的安装角度,y5表示所述第一预设距 离,y0表示所述第二预设距离,Z(K)表示所述最优预测距离,X(K)表示所述最优估算距离。 优选地,所述第一预设距离通过如下方式获得: 在传感器输出5V的地方放置第一标定物; 将传感器测量距离作为所述第一预设距离。 优选地,所述第二预设距离通过如下方式确定: 在传感器输出0V的地方放置第二标定物; 将传感器测量距离作为所述第二预设距离。 第二方面,本发明实施例提供一种施肥系统,包括: 安装模块,用于根据传感器预设组合模式、每一传感器在目标农机上的安装角度、 当前追肥行的宽度、传感器安装间距和目标农作物的高度,获取每一传感器在所述目标农 机上的安装高度; 卡尔曼模块,用于对于当前时刻所述目标农机的当前位置,对每一传感器采集的 数据进行卡尔曼滤波处理,获取最优估算距离和最优预测距离; 偏移方向模块,用于根据所述最优估算距离和所述最优预测距离,获取所述目标 农机的偏移方向; 7 CN 111587647 A 说 明 书 4/12 页 偏移距离模块,用于根据所述最优估算距离、所述最优预测距离、传感器安装角 度、第一预设距离和第二预设距离,获取所述目标农机的偏移距离; 施肥模块,用于根据所述偏移方向和所述偏移距离,改变所述目标农机的当前位 置,以使得对所述目标农作物进行施肥。 第三方面,本发明实施例提供一种电子设备,包括存储器、处理器及存储在存储器 上并可在处理器上运行的计算机程序,处理器执行程序时实现本发明第一方面提供的一种 施肥方法的步骤。 第四方面,本发明实施例提供一种非暂态计算机可读存储介质,其上存储有计算 机程序,该计算机程序被处理器执行时实现本发明第一方面提供的一种施肥方法的步骤。 本发明实施例提供的一种施肥方法及系统,利用不同的超声波传感器组合模式, 实时扫描目标农作物的追肥行,为农户提高一种更加安全、可靠、成本低、对行精度高,目标 农作物追肥行精准对行的方法。在加强农艺农机融合,提高追肥对行精度,减低农作物损失 率,提高化肥利用率同时,提高农作物产量品质促进追肥技术研究和装备的研制具有重要 的意义。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发 明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根 据这些附图获得其他的附图。 图1为本发明实施例提供的一种施肥方法的流程图; 图2为本发明实施例中传感器安装方式示意图; 图3为本发明实施例中边缘校正模式的示意图; 图4为本发明实施例中并行组合模式的示意图; 图5为本发明实施例提供的一种施肥方法的应用示意图; 图6为本发明实施例提供的一种施肥系统的结构示意图; 图7为本发明实施例提供的一种电子设备的实体结构示意图。











