
技术摘要:
本发明属于无人机技术领域,公开一种无人机可伸缩全面保护控制系统及方法,图像采集模块,用于无人机在飞行过程中向无人机的周围按一定频率拍摄图像;图像特征校对模块,采用SIFT的特征点匹配技术对拍摄的图像进行自动判断周边是否存在障碍物;距离测定模块,用于通过 全部
背景技术:
目前,无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机, 或者由车载计算机完全地或间歇地自主地操作,它具有体积小、造价低、使用方便、对作战 环境要求低、战场生存能力较强等优点。在无人机飞行过程中,如果操作不好很容易撞到障 碍物,造成机毁。 但是现有的大部分无人机并没有相应的保护措施,很容易出现撞击损坏的事情发 生;部分无人机安装了保护装置,但保护装置整体覆盖无人机,提高了无人机的飞行阻力, 并且增加了能源消耗。 通过上述分析,现有技术存在的问题及缺陷为: (1)现有的大部分无人机并没有相应的保护措施,很容易出现撞击损坏的事情发 生; (2)部分无人机安装了保护装置,但保护装置整体覆盖无人机,提高了无人机的飞 行阻力,并且增加了能源消耗。
技术实现要素:
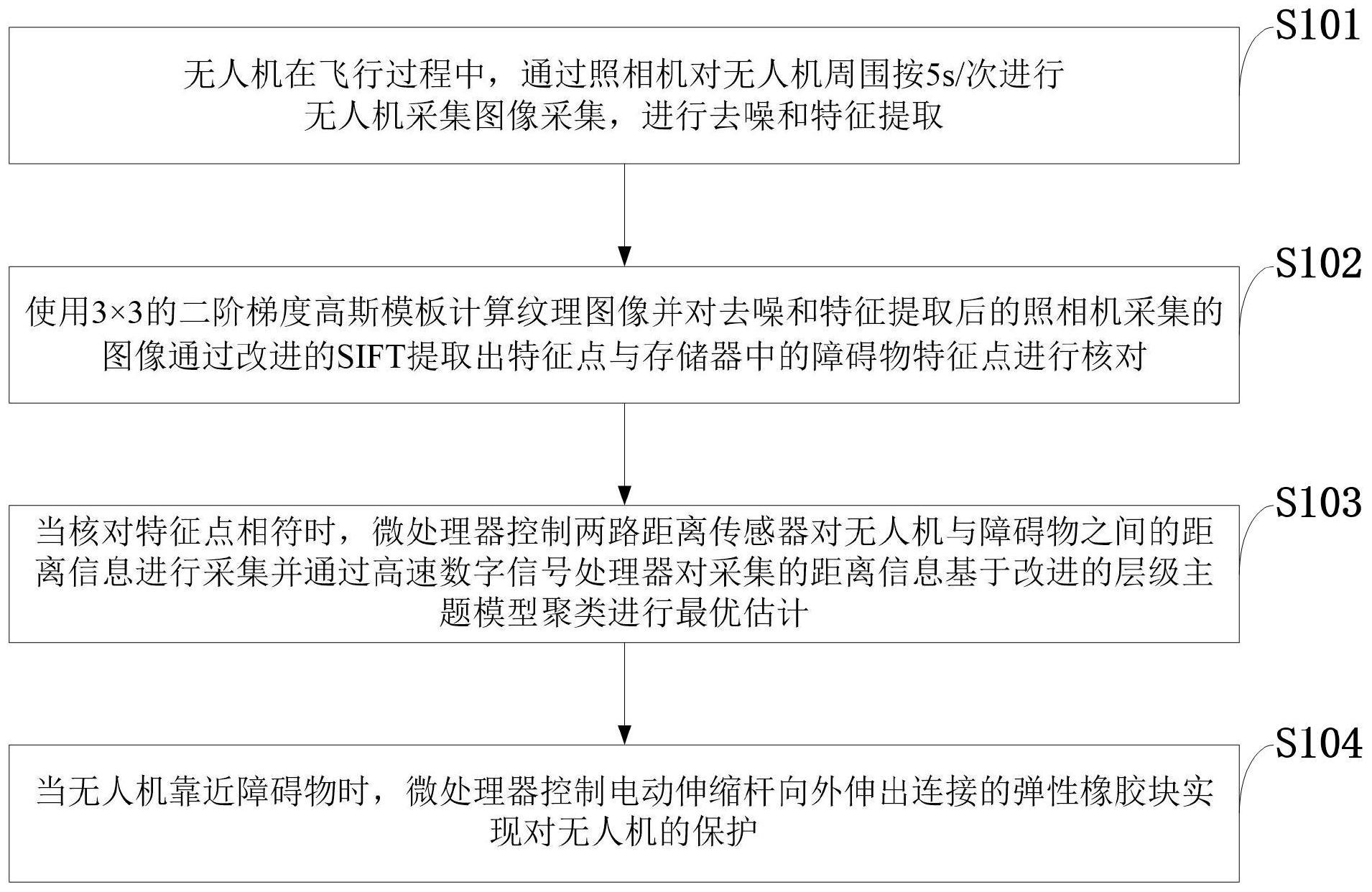
针对现有技术存在的问题,本发明提供了一种无人机可伸缩全面保护控制系统及 方法。 本发明是这样实现的,一种无人机可伸缩全面保护控制方法,所述无人机可伸缩 全面保护控制方法包括: 步骤一,无人机在飞行过程中,通过照相机对无人机周围按5s/次进行无人机采集 图像采集,进行去噪和特征提取; 所述去噪包括: (1)将含噪无人机采集图像f(x,y)进行平稳小波变换邻域系数萎缩的无人机采集 图像去噪,分别获得子带系数:低频系数、水平细节系数、垂直细节系数和对角细节系数; (2)对第一层的低频系数利用PCNN进行区域分割; (3)将低频系数保持不变,对各层的水平细节系数、垂直细节系数和对角细节系数 分别进行邻域阈值处理; (4)采用脉冲耦合神经网络对噪声无人机采集图像进行处理,得到熵序列En,将En 作为边缘检测算子; (5)进行阈值寻优,得到最优去噪阈值k; (6)根据求得的边缘检测算子En和最优去噪阈值k,采用改进的各向异性扩散模型 对无人机采集图像进行去噪; 6 CN 111572790 A 说 明 书 2/8 页 所述无人机采集图像的特征提取包括:将L个经过噪声处理后的无人机采集图像 分别按行展开后再进行组合,形成一个L行、M×N列的矩阵X=(x1,x T2,x3,Λ,xL) ; 对矩阵X进行均值化,使得E(X)=0; 对矩阵X进行白化处理,使得E(XTX)=I; 初始化独立分量的个数,使得n=1,其中,n为独立分量的个数; 初始化wn,随机选取wn=wn/||wn||; 根据公式wn=E{Xg(w Tn X)}-E{g′(w Tn X)}wn,求取wn; 根据公式 迭代出wn 1; 根据公式 和wn 1=wn 1/||wn 1||,迭代出wn 1; 判断得到的wn 1是否收敛,如果wn 1不收敛,返回求取wn; 取n=n 1,在n<M的情况下,逐一提取出所有的独立分量; 将各个独立分量构成矩阵S=(s ,s ,Λ,s )T1 2 P ,根据公式P=FS-1计算出L个无人机 采集图像的特征P; 步骤二,使用3×3的二阶梯度高斯模板计算纹理图像并对去噪和特征提取后的照 相机采集的图像通过改进的SIFT提取出特征点与存储器中的障碍物特征点进行核对; 步骤三,当核对特征点相符时,微处理器控制两路距离传感器对无人机与障碍物 之间的距离信息进行采集并通过高速数字信号处理器对采集的距离信息基于改进的层级 主题模型聚类进行最优估计; 步骤四,当无人机靠近障碍物时,微处理器控制电动伸缩杆向外伸出连接的弹性 橡胶块实现对无人机的保护。 进一步,所述使用3×3的二阶梯度高斯模板计算纹理图像包括: 水平方向上: 其中,I(x,y)表示图像NL的像素强度; 垂直方向上: 计算梯度值: 进一步,所述基于改进的层级主题模型聚类包括: 将距离信息引入主题模型中进行联合建模,得到聚类结果,每一个聚类对应一个 专题; 7 CN 111572790 A 说 明 书 3/8 页 建模距离信息时选择某距离上的函数或某随机过程来刻画主题的强度变化;Beta 分布相对于其他分布具有不对称性,用来建模距离信息; Beta分布的概率密度函数: 利用层级模型nCRP建模不同层级的专题; 采样层级按照以下条件概率设定: p(zd,n|z-(d,n) ,c,w,m,π,η)∝p(zd,n|zd,-n,m,π)p(wd,n|z,c,w-(d,n) ,η); zd ,n代表当前词的主题分配情况,zd ,-n代表排除了所要采样的主题之后的其余观 测数据的当前主题分配情况,k为主题索引,c,w,m,π,η为超参数。 本发明的另一目的在于提供一种计算机设备,所述计算机设备包括存储器和处理 器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器 执行如下步骤: 步骤一,无人机在飞行过程中,通过照相机对无人机周围按5s/次进行无人机采集 图像采集,进行去噪和特征提取; 步骤二,使用3×3的二阶梯度高斯模板计算纹理图像并对去噪和特征提取后的照 相机采集的图像通过改进的SIFT提取出特征点与存储器中的障碍物特征点进行核对; 步骤三,当核对特征点相符时,微处理器控制两路距离传感器对无人机与障碍物 之间的距离信息进行采集并通过高速数字信号处理器对采集的距离信息基于改进的层级 主题模型聚类进行最优估计; 步骤四,当无人机靠近障碍物时,微处理器控制电动伸缩杆向外伸出连接的弹性 橡胶块实现对无人机的保护。 本发明的另一目的在于提供一种计算机可读存储介质,存储有计算机程序,所述 计算机程序被处理器执行时,使得所述处理器执行如下步骤: 步骤一,无人机在飞行过程中,通过照相机对无人机周围按5s/次进行无人机采集 图像采集,进行去噪和特征提取; 步骤二,使用3×3的二阶梯度高斯模板计算纹理图像并对去噪和特征提取后的照 相机采集的图像通过改进的SIFT提取出特征点与存储器中的障碍物特征点进行核对; 步骤三,当核对特征点相符时,微处理器控制两路距离传感器对无人机与障碍物 之间的距离信息进行采集并通过高速数字信号处理器对采集的距离信息基于改进的层级 主题模型聚类进行最优估计; 步骤四,当无人机靠近障碍物时,微处理器控制电动伸缩杆向外伸出连接的弹性 橡胶块实现对无人机的保护。 本发明的另一目的在于提供一种运行所述无人机可伸缩全面保护控制方法的无 人机可伸缩全面保护控制系统,所述无人机可伸缩全面保护控制系统包括: 8 CN 111572790 A 说 明 书 4/8 页 图像采集模块,与中央控制模块连接,包括照相机,用于无人机在飞行过程中向无 人机的周围按一定频率拍摄图像; 图像特征校对模块,与中央控制模块连接,采用SIFT的特征点匹配技术对拍摄的 图像进行自动判断周边是否存在障碍物; 在通过无人机进行采集完图像信息之后,通过改进的SIFT提取出的特征点,可以 把特征点构造成向量P={p1,p2,…,pn},其中n是特征点个数,然后通过向量P与内存的特征 总向量进行校对,对于其中匹配度达到60%时,判定为存在障碍物; 距离测定模块,与中央控制模块连接,包括两路距离传感器,用于通过距离传感器 检测无人机与障碍物之间的距离; 两路距离传感器能够测量无人机距离障碍物的直线距离,并且以1s的频率向无人 机的飞行控制终端返回距离障碍物的距离,高速数字信号处理器运行卡尔曼滤波器,对两 路传感器返回的信息进行数据融合,得到无人机距离障碍物距离的最优估计; 自动伸缩模块,与中央控制模块连接,包括电动伸缩杆、弹性橡胶块、滑轮,用于无 人机靠近障碍物时,电动伸缩杆向外伸出连接的弹性橡胶块实现对无人机的保护; 中央控制模块,与图像采集模块、图像特征校对模块、距离测定模块、自动伸缩模 块连接,包括微处理器,用于通过控制图像采集模块按照一定的设定频率对无人机的周边 进行图像采集,并通过图像特征校对模块对采集的周边图像进行特征的提取与存储的障碍 物图像的特征总集合进行核对,当达到标准匹配度时,则自动判定存在障碍物,进而控制距 离测定模块对无人机与障碍物的距离进行测定并进行传输,当测定距离与无人机距离接近 时,则控制电动伸缩杆向外伸出连接的弹性橡胶块实现对无人机的保护; 存储模块,与中央控制模块连接,包括存储器,用于存储障碍物特征点的集合,并 受中央控制模块控制与采集的图像特征点进行核对。 进一步,所述自动伸缩模块的结构设置有电动伸缩杆,电动伸缩杆的端部连接无 人机,顶部连接弹性橡胶块。 进一步,所述弹性橡胶块内部设置有连接轴,连接轴上方连接有滑轮。 进一步,所述滑轮采用无动力控制,用于改变无人机触碰障碍物后的运行轨迹。 所述无人机可伸缩全面保护控制系统进一步还包括: 无线信号传输模块,与中央控制模块连接,包括无线信号收发器,用于将无人机与 障碍物之间的距离信息传输给控制终端; 显示模块,与中央控制模块连接,包括显示屏,用于对无人机的状态及无人机与障 碍物之间的距离信息进行显示。 结合上述的所有技术方案,本发明所具备的优点及积极效果为: (1)本发明采用的可伸缩的保护装置,可以对无人机在飞行过程中进行全面的保 护,采用的软性橡胶材质重量轻便,节省了无人机电力的消耗,并且采用的自动探测,自动 伸缩结构使得整体结构紧凑,避免增加无人机在飞行过程中的空气阻力,节省无人机电力 的消耗,智能化程度高。 (2)本发明采用的电动伸缩杆可以实现保护橡胶块的自动伸缩,减少了飞行过程 中的空气阻力。 (3)本发明采用的滑轮结构可使无人机在触碰到障碍物时,减小无人机与障碍物 9 CN 111572790 A 说 明 书 5/8 页 之间的摩擦力,使无人机可改变飞行方向,及时摆脱与障碍物的接触。 (4)本发明滑轮采用无动力控制,可根据无人机的动力方向而改变无人机的运行 方向。 (5)本发明提供的无人机保护装置的使用方法,智能化程度高,并可以进行人机交 互,使监测人员实时了解无人机的运行情况。 (6)本发明提供的无线信号传输模块和显示模块可以实现人机交互,方便人员对 无人机的监控。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使 用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本申请的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的 附图。 图1是本发明实施例提供的无人机可伸缩全面保护控制系统的结构框图; 图2是本发明实施例提供的自动伸缩模块结构示意图; 图3是本发明实施例提供的无人机可伸缩全面保护控制方法流程图; 图中:1、图像采集模块;2、图像特征校对模块;3、距离测定模块;4、自动伸缩模块; 5、中央控制模块;7、电动伸缩杆;8、弹性橡胶块;9、滑轮;10、无线信号传输模块;11、显示模 块。











