
技术摘要:
本发明实施例公开了一种应用于自由航路空域的自主航迹规划与冲突解脱方法及装置,涉及空中交通管理与规划技术领域,为空管人员提供了合理的辅助措施。本发明包括:获取空域状态数据和航空器运行数据;利用所述空域状态数据,对空域进行基于元胞的离散化处理;利用基于 全部
背景技术:
目前,世界范围内空中交通系统正处于全面转型升级阶段,以应对不断增长的飞 行需求、复杂庞大的体系结构和多元多变的运行环境。为了缓解日益增长的运输总量与日 趋饱和的空域容量间的矛盾,基于航迹运行与自由航路空域概念应运而生。我国也于2019 年发布了基于我国空情的基于航迹运行概念。 基于航迹运行的应用得益于星基导航与监视技术的发展以及四维飞行管理系统 的完善,这同时也促进了管制员与飞行员情景意识的共享。然而,在高密度条件下的基于航 迹的自由航线运行中,管制员工作负荷成为制约空域容量进一步提升的关键因素。尤其是 在部分空域受限的情况下,航空器冲突的不确定性,往往会引发连锁反应,导致管制员工作 负荷爆发式增长,从而大幅增加运行风险。 因此,如何合理提高管制员工作中的自动化程度,并提供合理的辅助措施,成为了 目前业内主要的研究方向。
技术实现要素:
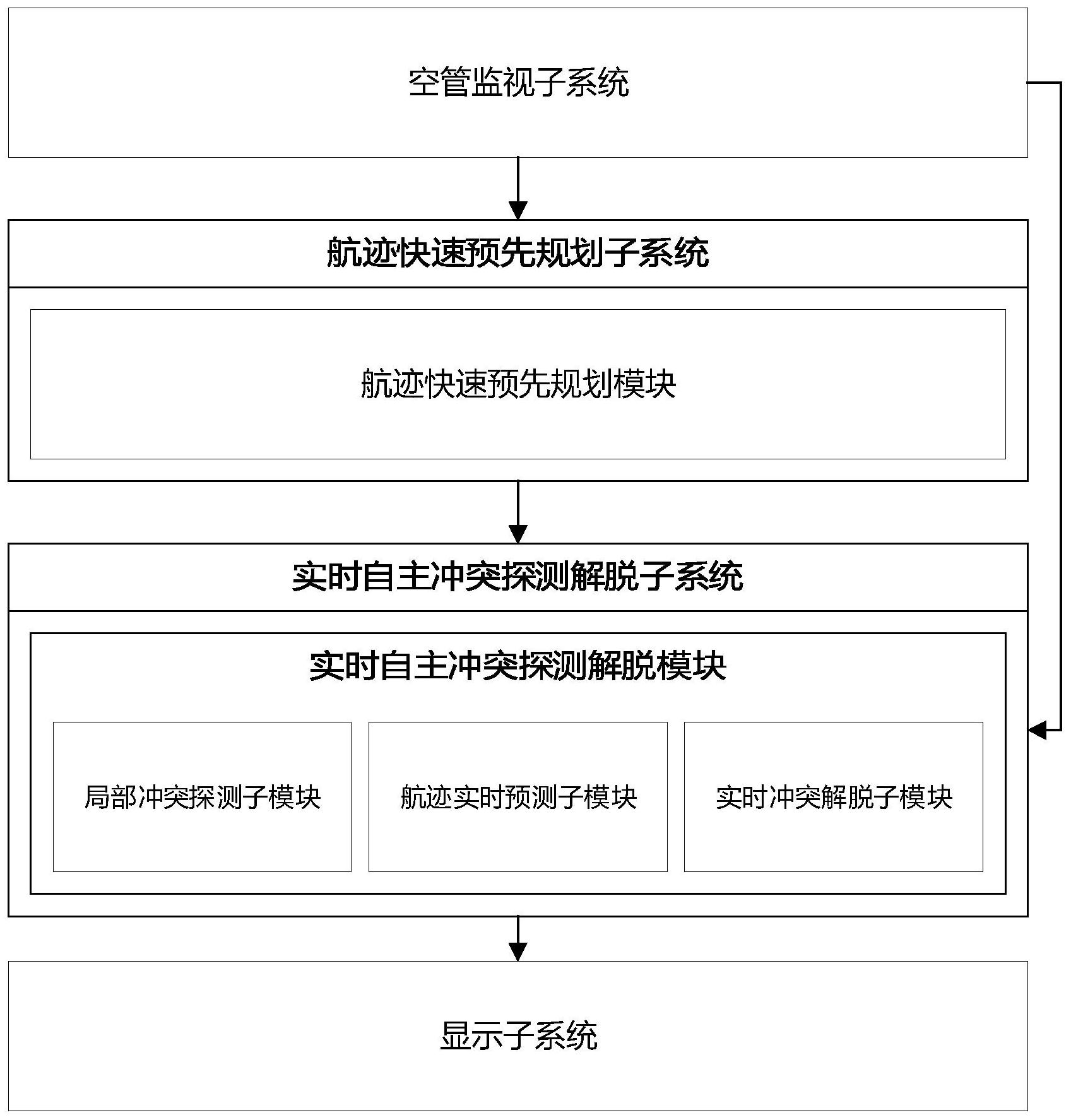
本发明的实施例提供一种应用于自由航路空域的自主航迹规划与冲突解脱方法 及装置,为空管人员提供了合理的辅助措施,缓减了自主航迹运行下的人机认知同步问题。 为达到上述目的,本发明的实施例采用如下技术方案: 第一方面,本发明的实施例提供的方法,包括: 获取空域状态数据和航空器运行数据;利用所述空域状态数据,对空域进行基于 元胞的离散化处理;利用基于元胞的空域离散状态,获取预先规划结果,所述预先规划结果 包括:满足限制区约束的路径;利用所述预先规划结果和所述航空器运行数据,获取潜在冲 突数据,并根据所述潜在冲突数据,获取航迹冲突解脱方案。 第二方面,本发明的实施例提供的装置,包括: 航迹预先规划模块,用于利用所述空域状态数据,对空域进行基于元胞的离散化 处理;并利用基于元胞的空域离散状态,获取预先规划结果,所述预先规划结果包括:满足 限制区约束的路径; 航迹冲突处理模块,用于利用所述预先规划结果和所述航空器运行数据,获取潜 在冲突数据,并根据所述潜在冲突数据,获取航迹冲突解脱方案。 本实施例中,通过采集包含限制区信息的空域实时状态信息,并对空域进行基于 元胞的离散化处理,对空域元胞进行状态分类,根据离散化后的空域状态,构建基于可视图 的预先航迹可行网络图,通过路径搜索算法获取满足限制区约束的最优路径,实现航迹快 4 CN 111739347 A 说 明 书 2/12 页 速预先规划;采集航空器实时运行参数,根据连续飞行动力学与航迹计划预测航空器未来 航迹,对航空器相对位置进行分类,并在此基础上进行局部冲突探测,对探测到的潜在冲 突,搜索满足约束的改航航迹,对当前约束下无可行解的航空器,推迟其后续航迹点受控到 达时间,最终实现实时自主航迹冲突探测解脱。本发明适用于空中交通管理,为空管人员提 供了合理的辅助措施,缓减了自主航迹运行下的人机认知同步问题。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的 附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领 域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附 图。 图1为本发明实施例提供的基于元胞的空域离散化模型图; 图2为本发明实施例提供的元胞主要位置点模型图; 图3为本发明实施例提供的基于可视图的预先航迹可行网络模型图; 图4为本发明实施例提供的航空器实时位置更新模型图; 图5为本发明实施例提供的局部冲突探测模型图; 图6为本发明实施例提供的两航空器相对位置关系模型图; 图7为本发明实施例提供的基于可达时空域的改航优化模型图; 图8为本发明实施例提供的潜在改航区范围拓展模型图; 图9为本发明实施例提供的改航优化模型算法流程图; 图10为本发明实施例提供的方案逻辑的拓扑示意图; 图11为本发明实施例提供的系统架构示意图。











