
技术摘要:
本公开描述了一种微机电多轴陀螺仪,该微机电多轴陀螺仪包括:四个基准质量块的组、用于从中央锚定点悬置四个基准质量块的组的中央悬架装置。该陀螺仪还包括同步框架和四个检测质量块的组。一个或更多个侧向角弹簧从侧向相邻的基准质量块延伸至每个检测质量块,并且一 全部
背景技术:
在利用振荡基准质量块的微机电(MEMS)陀螺仪中,一个普遍的问题是,质量块应 当优选地易于通过驱动致动器驱动到初级振荡模式(也可以称为驱动振荡模式),并且也易 于通过科里奥利力设置成次级振荡模式(也可以称为感应振荡模式),但是仍然优选地不受 外部干扰而移动。换言之,陀螺仪应当优选地不受由周围元件施加至该陀螺仪的线性和旋 转振动的干扰,使得其输出信号仅由陀螺仪在预期的测量频率范围内所经历的角旋转速率 确定。例如,在汽车应用中,干扰振动通常在1kHz至50kHz的频率范围内,而测量频率范围通 常在1kHz以下。 可以仅利用一个振荡基准质量块来构造简单的MEMS陀螺仪,但是如果存在频率接 近陀螺仪的工作频率的外部振动,则陀螺仪的输出信号通常将非常嘈杂。这种陀螺仪仅在 高于50kHz的工作频率下才实用,在该频率下,陀螺仪的灵敏度可能非常低,并且其他干扰 效应、比如由于制造缺陷而产生的正交信号可能会变得非常突出。众所周知,两个或四个基 准质量块反相振荡的基准质量块系统可以比一个质量块的陀螺仪稳定得多,因为由引起两 个或四个基准质量块的同相运动的振动所产生的信号分量可以经由差分测量在某种程度 上自动抵消。此外,如果可以将同相谐振频率提高到50kHz以上而又不影响差分谐振频率, 则陀螺仪对于外部振动可能非常稳定,因为对于干扰振动不存在谐振放大。 一些MEMS陀螺仪被设计成用于测量围绕垂直于设备基板的一个轴线的旋转速率。 这种陀螺仪可以被称为z轴陀螺仪。其他MEMS陀螺仪被设计成用于测量围绕位于基板平面 内的两个垂直轴线中的任意一个垂直轴线的旋转速率。这样的陀螺仪可以被称为x轴陀螺 仪和/或y轴陀螺仪。 可以通过将在相同设备中用于不同旋转轴线的两个或三个单轴陀螺仪组合来创 建多轴陀螺仪。这种多轴陀螺仪将具有两个或三个离散的工作频率,这使得电子电路的设 计变得困难。于是,对于初级振荡而言,还需要多个维持和稳定电路。一些多轴MEMS陀螺仪 被设计成使用同一组振荡的基准质量块来测量围绕x、y和/或z轴的旋转速率,以避免不同 频率之间可能的干扰。 很难使基于单个振荡频率的多轴陀螺仪具有强大的对抗外部干扰的能力,因为必 须赋予所有基准质量块沿许多不同方向振荡的自由度,以便能够自由地采用与绕三个相互 正交的轴线的角旋转相关联的任何次级振荡模式。外部振动仍然必须在使基准质量块附接 至固定结构的部分弹性悬架和联接装置中被抑制或在差分测量中被抵消。在利用两个或四 个基准质量块的多轴陀螺仪中,很难实现强大的抵抗外部振动的能力以及将所有振荡模式 与能量泄漏隔离。 文献US2012048017公开了一种多轴陀螺仪,其中,初级振荡包括相对于中心点同 4 CN 111578921 A 说 明 书 2/12 页 时径向振荡的四个质量块。在该装置中,z轴次级振荡模式不易于与x轴和y轴次级振荡模式 解耦。
技术实现要素:
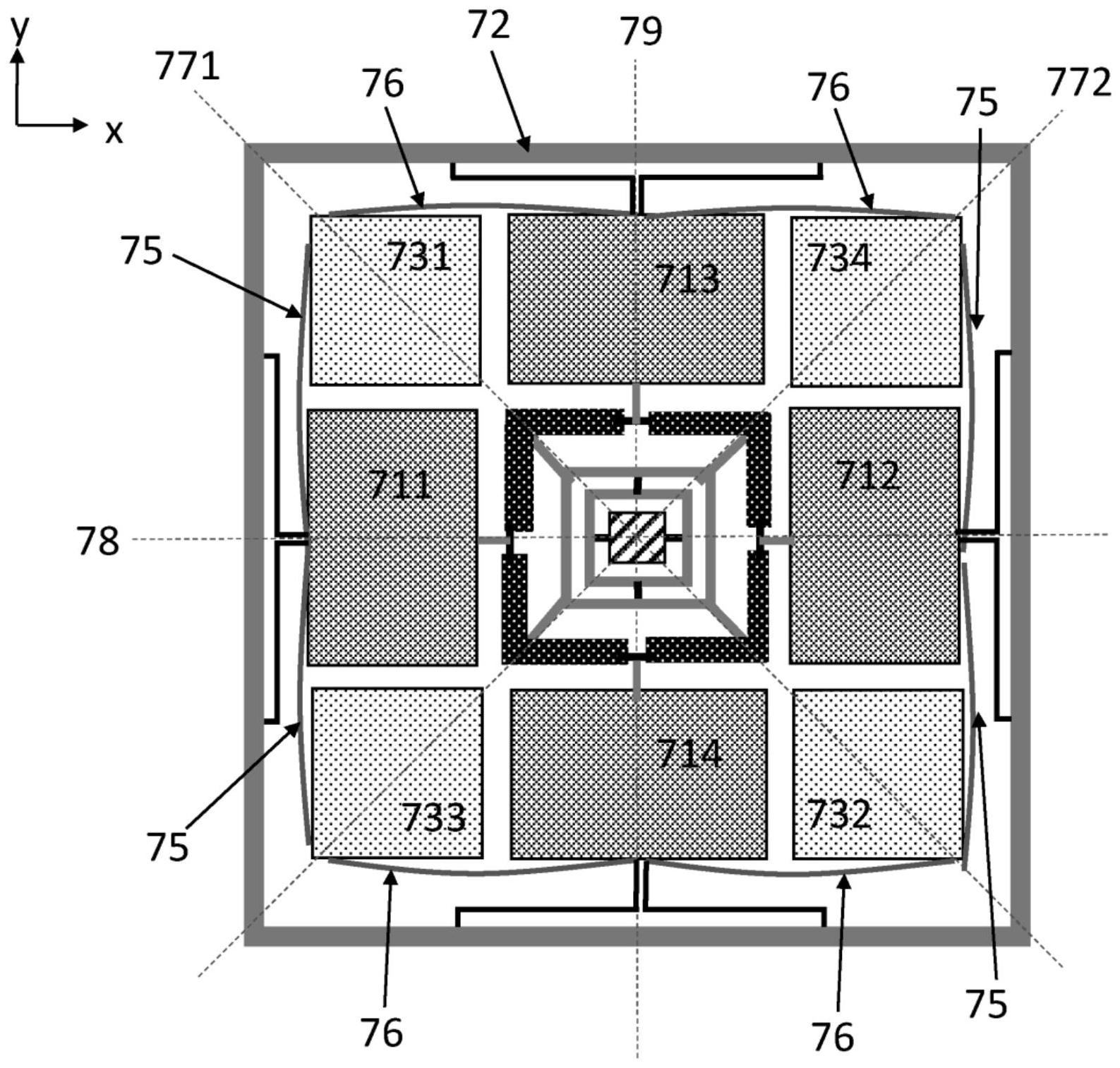
本公开的目的是提供一种用于减轻上述缺点的设备。 本公开的目的通过一种具有如独立权利要求中所述的特征的装置来实现。本公开 的优选实施方式在从属权利要求中公开。 本公开是基于利用四个基准质量块的组和四个检测质量块的组以及围绕这些基 准质量块的同步框架的思想。基准质量块附接至同步框架,以促进x轴和y轴次级振荡模式 的同步。检测质量块通过侧向角弹簧和横向角弹簧附接至基准质量块,所述侧向角弹簧和 横向角弹簧将z轴次级振荡从基准质量块传递至检测质量块。侧向角弹簧和横向角弹簧定 尺寸成使得当基准质量块在初级振荡模式下振荡时以及当基准质量块在x轴和y轴次级振 荡模式下振荡时,检测质量块基本保持静止。 附图说明 以下将参照附图通过优选实施方式更详细地描述本公开,在附图中: 图1解释了图2a至图2f中使用的符号。 图2a至图2d示出了第一初级振荡模式和相应的次级振荡模式。 图2e至图2f示出了第二初级振荡模式和相应的次级振荡模式。 图3a至图3b示出了外围同步框架和框架悬架弹簧。 图4a至图4c示出了中央悬架装置。 图5a至图5b示出了适应初级振荡模式和/或使初级振荡模式同步的同步框架。 图6示出了外围悬架装置。 图7a至图7d示出了检测质量块、检测质量块的振荡和检测质量块的悬架。 图8说明了更详细的陀螺仪结构。











