
技术摘要:
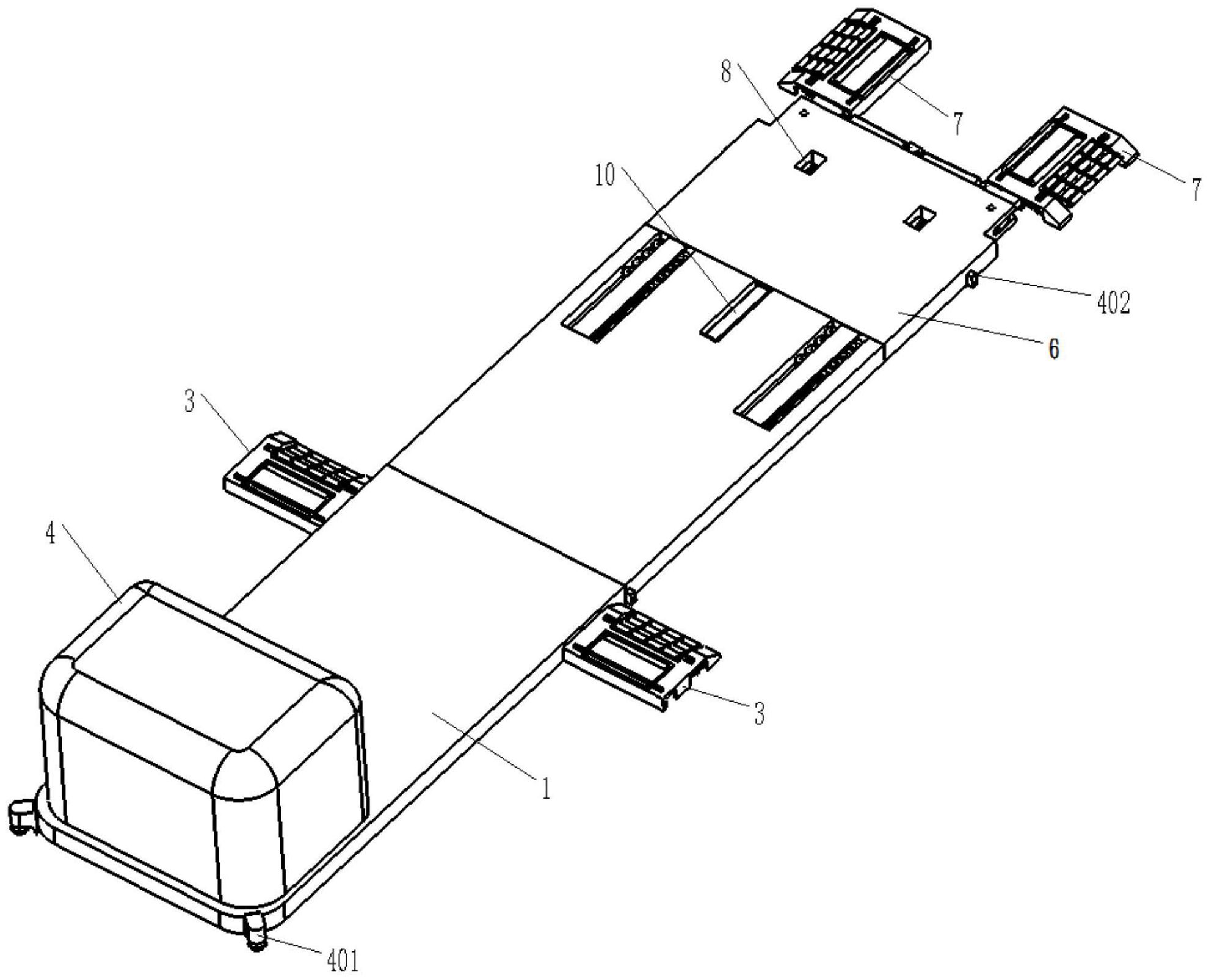
一种带有联动翻板式夹臂的伸缩式汽车搬运机器人,其特征是它包括:车头机架(1)和车尾机架(6),所述的车头机架(1)的一端安装有主动行走转向轮(2)和带动联动翻板的固定夹臂(3),车头机架(1)的另一端上设有两个滚轮安装槽(101)和调距电缸安装槽(103);所 全部
背景技术:
目前,停车场的搬运机器人大多采用两个夹持臂加一个大梁的结构,两个夹持臂 在大梁上相向移动将车辆夹起,然后再通过行走装置带动车辆移动。此类搬运机器人需要 一个能承重的钢结构大梁,而且最好是设计成能伸缩的大梁,为了保证刚度,大梁需要设计 成较大较高的结构,这就导致机器人重量很大。另一方面,此类搬运机器人大多是从侧面插 入车底,提升后为了防止倾覆,需要在夹持臂的远端加装防脱落机构,导致整体结构复杂笨 重,同时,从侧面搬运还必须进行侧面停放,车辆只能一字形停放才能方便取放,地面利用 率低,会出现需要顺序停放和搬出不便,需要反复挪车才能取出的问题,有必要加以改进。
技术实现要素:
本发明的目的是针对现有的汽车搬动机器人结构复杂,重量重,取放不便的问题, 设计一种带有联动翻板式夹臂的伸缩式汽车搬运机器人,它不仅省去了大梁,而且方便取 放,实现任意车位的任意停取以及夹持安全可靠。 本发明的技术方案是: 一种带有联动翻板式夹臂的伸缩式汽车搬运机器人,其特征是它包括:车头机架1和车 尾机架6,所述的车头机架1的一端安装有主动行走转向轮2和带联动翻板的固定夹臂3,车 头机架1的另一端上设有两个滚轮安装槽101,滚轮5安装在滚轮安装槽101中,两个滚轮安 装槽101之间设有调距电缸安装槽103;所述的车尾机架6的中间安装有车轮8,它靠近车头 机架的一端安装有插入车头机架中的两个支架601和一个调距电缸10,调距电缸10的一端 固定在车尾机架上,另一端固定在车头机架的调距电缸安装槽103中,两个支架601的侧面 均设有供滚轮5滚动的导槽6011,在车尾机架的另一端安装有两个带联动翻板的旋转夹臂 7,旋转夹臂7由夹持电缸9驱动作90度的来回转动。 所述的旋转夹臂7连接有旋转支架710,旋转支架710的旋转部711枢装在车尾机架 6上,旋转支架710通过夹持电机连接部712与夹持电缸9的驱动轴铰接相连;所述的旋转支 架710安装在车尾机架6端部的旋转支架安装槽602。 所述的车轮8安装在车尾机架上的车轮安装槽603中。 所述的固定夹臂3和旋转夹臂7的结构相同,它们均包括安装座300、轮毂限位座 310、轮毂限位板320、联动机构330,所述轮毂限位座310,轮毂限位板320对应安装在安装座 300上,所述联动机构330对称安装在安装座300的两侧,用以连接轮毂限位座310和轮毂限 位版320,轮毂限位座310和轮毂限位板320均连接有复位弹簧334。 所述的所述轮毂限位座310包括:保持架311、转轴312、安装轴313和联动支架314, 转轴312安装在保持架311上并能各自转动,保持架311安装在安装轴313上,安装轴313安装 4 CN 111550111 A 说 明 书 2/4 页 在安装座300上,联动支架314套装在安装轴313上。 所述的轮毂限位板320包括:第二保持架321、第二转轴322、、第二安装支架324和 盖板325;第二转轴322安装在第二保持架321上并同步转动,盖板325设在第二保持架321 上,第二安装轴322通过第二安装支架324安装在安装座300中;第二保持架321的内侧设有 复位弹簧334的复位弹簧支架335。 所述的联动机构330包括:中间连接杆331、凸轮限位座332和过渡件333,所述中间 连接杆331的一端设有径向光孔,另一端设有径向螺纹孔;其光孔端穿设有螺栓旋装在过渡 件上,其螺纹孔端的螺栓穿过凸轮限位座332上的轨道槽3321,螺栓穿过轨道槽的一端上加 装有防脱螺母;过渡件333套装在第二安装轴322上,凸轮限位座332为扇形,以选择合适的 角度来限制轮毂限位座310的转动;凸轮限位座332也设有复位弹簧支架335。 所述的车头机架1上安装前端激光雷达401,所述的车尾机架6上靠近旋转夹臂7位 置处安装有光电传感器402,前端激光雷达用于负责车辆前行过程中行驶路径上障碍物的 检测并给出信号反馈到前端激光雷达;光电传感器用于判断待搬运汽车是否到位;前端激 光雷达、光电传感器均与电控系统电气连接。 所述的主动行走转向轮2通过安装在车前机架1上的车轮安装架102安装在车前机 架上,车前机架上还安装有电池404和电控系统403,电池为各电气部件供电。 本发明的有益效果: 本发明结构简单,紧凑。能适应各种轴距小车的搬运,夹持可靠。 本发明采用从车头或车尾插入车身中进行搬运,可在任间停车位插入停放,也可 在任意位置取出车辆。适用于车辆的非字形停放。 附图说明 图1为本发明整体结构示意图; 图2为本发明车头机架结构示意图; 图3为本发明固定夹臂结构示意图; 图4为本发明轮毂限位座结构示意图; 图5为本发明轮毂限位板结构示意图; 图6为本发明联动机构结构示意图; 图7为本发明车尾机架结构示意图; 图8为本发明旋转夹臂结构示意图; 图9为本发明工作状态结构示意图; 图中,车头机架1,滚轮安装槽101,车轮安装架102,主动行走转向轮 2,固定夹臂3,安 装座300,轮毂限位座310,保持架311,转轴312,安装轴313,安装支架314,轮毂限位板320, 第二保持架321,第二转轴322,第二安装支架324,盖板325,联动机构330,连接杆331,凸轮 限位座332,轨道槽3321,过渡件333,复位弹簧334,复位弹簧支架335,控制台4,前端激光雷 达401,光电传感器402,电控系统403,电池404,滚轮5,车尾机架6,支架601,导槽6011,旋转 夹臂7,旋转支架710,旋转部711,夹持电缸连接部712,车轮8,夹持电缸9,调距电缸10。 5 CN 111550111 A 说 明 书 3/4 页











